

如何看待 Boston Dynamics 2017.11.16 新发布的机器人 Atlas 视频? - 知乎
source link: https://www.zhihu.com/question/68242379/answer/261437310
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
如何看待 Boston Dynamics 2017.11.16 新发布的机器人 Atlas 视频?
歪点楼,写点科普,骗点赞^_^
新款Atlas机器人,外观上,最大的区别是大腿变健壮了很多,如下图所示(最左边是最新款):
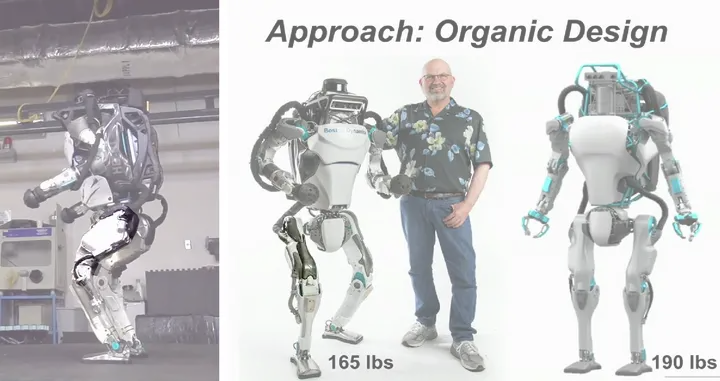
为了实现跳跃以及进一步的后空翻,对腿部大腿 正摆髋关节和膝关节 的动力需求比原本大了很多;相对应的,这两个关节的液压驱动单元应该就在图中机器人的大腿那部分(人大腿上的肌肉主要也是为这两个关节服务),可以明显的发现大了很多。
另外在这简单说一下,波士顿动力机器人驱动方式的演变过程:
1)最早他们的Bigdog(大狗)和Wildcat(野猫)等机器人用的是:二冲程汽油机 ->液压泵->电伺服液压缸
1.1 你也许想问,为何不用四冲程的,这样效率更高一些? 答案是: 二冲程的功率密度更高 (简单说就是输出相同的功率,二冲程引擎的重量小很多)
2.2 由于燃油引擎的响应速度很慢(简单说就是,你踩一脚油门,引擎需要相对较长的时间才能提高输出功率,推背感较差,这也就是为何特斯拉汽车的100公里加速可以比燃油超跑快很多),并且转矩转速波动较大,所以早期他们的机器人都带有一个液压储能罐(可以理解为电路中的大电容),为机器人提供瞬时的响应功率、降低油压波动等需要(比如你踹他一脚,他需要尽可能快速平稳的摆动腿以实现新的平衡)。储能罐如下图中蓝色部分
2)后来他们使用了:电池 -> 电机 ->液压泵->电伺服液压缸
2.1 这样就解决了原本使用二冲程汽油机带来的噪声的问题,并且由于电机的响应速度非常快,力矩平稳,貌似也同步的取消了大液压储能罐。如他们的Spot(2015)四足机器人和Atlas(~2017)
3)对于他们体型更小的机器人:电池 -> 电机
3.1 如 Spotmini(2016)和 New Spotmini(2017)四足机器人
PS: 波士顿最近几年几乎没有公布除视频外的更多的资料,本人也没看见过他们的实物机器人,以上可能有出入,欢迎指点一二。
最后送上萌图(侵删)
11.18 简单修改部分文字
@Boston Dynamics, What's new Atlas?“在座的各位都是垃圾”说的很好了,领先世界5-10年吧。
波士顿动力的狗狗机器人在Marc Raibert的《Legged Robots That Balance》这本书里有非常详细的原理介绍, 我读了这本书以后还做过一个仿真paulyang1990/toy_code。基本上弄明白了狗狗机器人的原理,大部分相关领域的PhD应该都能做到这一点。人形机器人行走的模型和狗狗机器人也差不多,同样原理很好理解。但是波士顿动力新的Atlas,则已经超出了大部分人的理解范围,怎么驱动、怎么建模、控制器是怎么实现的,难以一下看出背后的原理。
其实机器人的研究呢,硬件平台是非常重要的。机器人学术界最先进的机器人和波士顿动力的机器人对比起来,就像是奔腾4笔记本和英伟达高端工作站DGX的区别。
硬件平台怎么来,不完全是钱砸出来的。
一个公司持续十几年每年几百万美元的投入,很大牛的实验室运气好也能拿到这样的funding。
但是合理的公司架构和管理制度,能够保证员工扎实地积累经验,不断加速后续的研发工作。
相比起来,学术界最顶尖的实验室,也都是流水一样的PhD待几年就走待几年就走,然后学校教授也缺乏管理大型组织和机构的实践经验,体制上就不像公司那么高效。更不用说公司没有发论文的压力,而学校是有的。
然而学术界的朋友们,比如觉得自己是垃圾的
同学,也不能妄自菲薄。几年前Marc Raibert在一次ICRA的演讲之后,PPT列出了公司成员的名单,绝大多数都是control, system领域的PhD。这些人在加入波士顿动力之前,也都是先在学术界做了几年“垃圾”的工作,才能具备到波士顿动力搞机器人的经验和能力。波士顿动力的成功,背后也是大量PhD先通过“垃圾”的学术工作打怪升级的经验攒起来的。
国内是没有这样的研究团队的,很不幸。
一是因为我国没有大规模培养实践和理论功底扎实的控制和机器人学博士的实力。浙大哈工大的机器人实验室还不错,除此之外没了,一年也就培养不到10个人。我国最优秀的一批大脑,比如清华姚班的学生,大部分也都出国学计算机了。而Marc Raibert每年都应该能从MIT、Stanford、CMU、Berkeley、GeTech、Michigan等学校找到上百个合适的PhD,然后再选出优秀的一批加入波士顿动力。
二是因为我国没有一批愿意十几年不求回报投资一个梦想的人。Marc Raibert在过去的三十年里通过各种渠道给自己的公司找资金赞助,其中美国国防部高级技术发展局的投资最大,超过十年的投资最后没有一毛钱回报,他们也认了。而我国现在创投圈,很多投资人应该今年投了资明年就想回本了。
中国机器人圈近年来有
通过一己之力把我国四足机器人硬件制造技术提升了一个层次,他的公司杭州宇树科技制造的狗狗机器人整体性能非常不错。然后也有一家叫做“北京钢铁侠”的公司在做双足人形机器人,频繁参加各种展会和活动,不过还没见这个机器人走过一步,相信吸引一些资金关注之后也有进展。但是上面两个问题不解决,很难有更快的发展。
当然,随着中国国力的增强,这方面的进展也在加快。至少国家层面上,机器人受到了关注,也有模仿美国国防部高级技术发展局创建的军委科技委,钱可能在未来几年里不再是问题。然而十年树木百年树人,机器人学方面的人才依然是个短期之内难以速成的因素。大疆的RoboMaster项目这几年一直在探索机器人专业人才的培养问题,这几年有点收获,也有很多困难要克服,总体来说是件任重道远的事情。只有当未来我们国家有三十-四十所每年能培养10-20名优秀机器人学博士的高等院校的时候,波士顿动力这样的公司才能在中国涌现出来。
早上刚起来就被BD刷频了,照例查邮箱,发现组长给全组发了一封邮件,全文就是一个BD的youtube链接
https://m.youtube.com/watch?v=fRj34o4hN4I
然后我的同事回复道:
A general distribution of Prozac will take place next Monday.
Until then, try to hold on during the week-end
Prozac是一种治疗抑郁症的药物。。。。
我们组使用的是日本AIST的人形机器人HRP,法国这边有一台HRP-4,日本的法日联合实验室有一台HRP-2。动态表现的差距实在是太大了。
原因之一可能是驱动方式的差异,电机vs液压
还有一个很重要的原因应该是:大多数人形机器人的控制系统使用的高增益的负反馈来生成大的转矩去抵消本身机器人的dynamics来使得机器人可以follow一个reference trajectory,这一点极大的限制了机器人动态特性,使得机器人大部分动作在人看来都十分僵硬,而且功耗极高。BD作为MIT的spin off,MIT研究机器人的动态好多年了,只是那个时候的媒体还没有现在这么发达,其实这些跳跃和后空翻,早在90年代MIT就做出来了,当然Atlas DoFs比下图的这个机器人多得多,模型也复杂得多:

(早年的MIT's Leg Lab)
Honda在1996年发布他们的人形机器人P2的时候,全世界也都非常震惊,Honda的人形机器人项目是完全保密的,在那个时候日本的人形机器人技术应该是领先于美国的。现在20年过去了,BD Atlas完爆了全世界的人形机器人,说不定再过20年后,就是中国了呢?
最后,上周我们组一个博士答辩,jury的成员之一是日本AIST HRP的设计者Shuuji Kajita,在提问环节,他问道:如果我们要设计下一代的人形机器人,请问你有什么建议?今天看到这个视频,这还建议个毛,HRP差atlas至少10年吧。不知道Kajita桑看到这个视频作何感想。。。
上文中“说不定再过20年后,就是中国了呢?“也是随手一写,本来是一种对未来的期待,但是被评论说是”今天最好听的笑话“而且现在还是精选评论,我也不得不多说两句。
我不知道你们为什么觉得中国就不可能出这样的公司?BD之所以能成为现在的样子,技术是很大的一方面,另外更重要的是:
- 工程师,研究人员配比
- 钱
首先不可否认,BD拥有世界上最好的一群机器人/控制科学家,但是一个机器人实验室,只靠单纯做机器人控制的科研人员是远远不够的,BD应该有很高的工程师,研究生人员配比,这样一个新的算法可以很快的被测试,机器人坏了可以很快的进行修理。
然后更重要的就是钱,BD其实一直都不缺钱,从wiki上BD的简介来看,最早BD是和美国海军合作,funding来源于Naval Air Warfare Center Training Systems Division,后来开始和DARPA合作,后又被Google收购,Google(应该)觉得它太烧钱不盈利,所以又转给Softbanks。
不缺钱 + 工程师配比高意味着什么,意味着机器人可以随便摔,随便坏,反正有钱买新的器件,反正坏了有工程师立刻进行修理。这一点
在他的回答王珂:在波士顿动力公司(Boston Dynamics)工作是怎样一番体验?中也说了。很多人看了视频以后说,这是工业界吊打学术界的典范。是啊,世界上任何一个高校或者科研机构的实验室,谁能经得起这么玩机器人?我以前在DLR,也算欧洲最有钱的机器人实验室之一了,我当时在LWR上测试我的算法的时候,一开始没有加滤波器使得机器人在steady state有比较大的震动,我的导师立刻让我停止。我们刚毕业的博士做的是HRP-4的摔倒策略,第一次摔把HRP-4的一个关节电机摔跪了,停工了大几个月,请来的KAWADA的工程师,然后又去工厂返修。
中国已经有了像大疆,
的宇树科技这样在机器人领域做出了很大成就的公司,20年时间出现一个类似BD的公司也并非天方夜谭。关键问题是:钱,要从哪里来?Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK