

模块设计 - CAN 通信
source link: https://wiki-power.com/%E6%A8%A1%E5%9D%97%E8%AE%BE%E8%AE%A1-CAN%E9%80%9A%E4%BF%A1
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
模块设计 - CAN 通信
CAN(Controller Area Network)是一种多主方式的串行通讯总线。基本设计规范要求有高的位速率、高抗电磁干扰性,而且能够检测出产生的任何错误,当信号传输距离达到 10Km 时 CAN-bus 仍可提供高达 5Kbps 的数据传输速率。
CAN 模块的设计,是基于 CAN 芯片,对串行信号(RX/TX)与 CAN 差分信号(CANH/CANL)进行互相转换。以下是两种较为常用的 CAN 收发器。
基于 TJA1050#
完整资料请见 Modularity_of_Functional_Circuit/ 模块设计 - CAN 通信 / 基于 TJA1050
特性#
- 供电:5 V(4.75-5.25 V)
- 高速率:60 Kbps-1 Mbps
- 完全符合 ISO 11898 标准
- 低电磁辐射(EME)
- 具有贷款输入范围的差动接收器,可抗电磁干扰(EMI)
- 可以连接至少 110 个节点
- 没有上电的节点不会对总线造成干扰
工作模式#
TJA1050 有两种工作模式(高速 / 静音),由引脚 S(RS) 来控制。
高速模式#
高速模式是普通的工作模式,将引脚 S 接地即可进入该模式。因引脚 S 内置下拉,所以即使外部没有连接,默认也是高速模式。
在这个模式中,总线输出信号有固定的斜率,并以最快的速度切换,适合于最大的位 速率和,或最大的总线长度,此时它的收发器循环延迟最小。
静音模式#
静音模式中,发送器是禁能的,不管 TXD 的输入信号,所以运行在非发送状态中消耗的电源电流,和在隐形状态中是一样的。将引脚 S 接高电平就可以进入静音模式。
静音模式中,节点可以被设置成对总线绝对无源的状态,此时微控制器不再直接访问 CAN 控制器,TJA1050 将会释放总线。
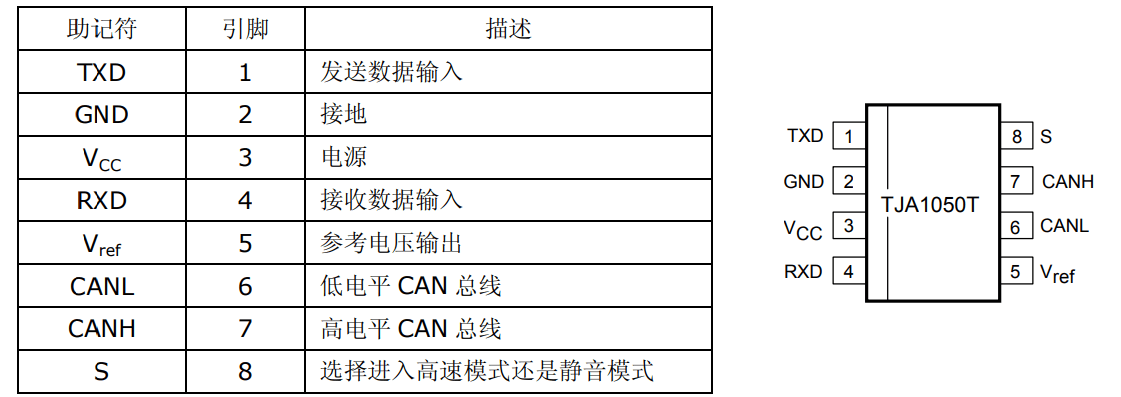
芯片管脚#
参考电路#
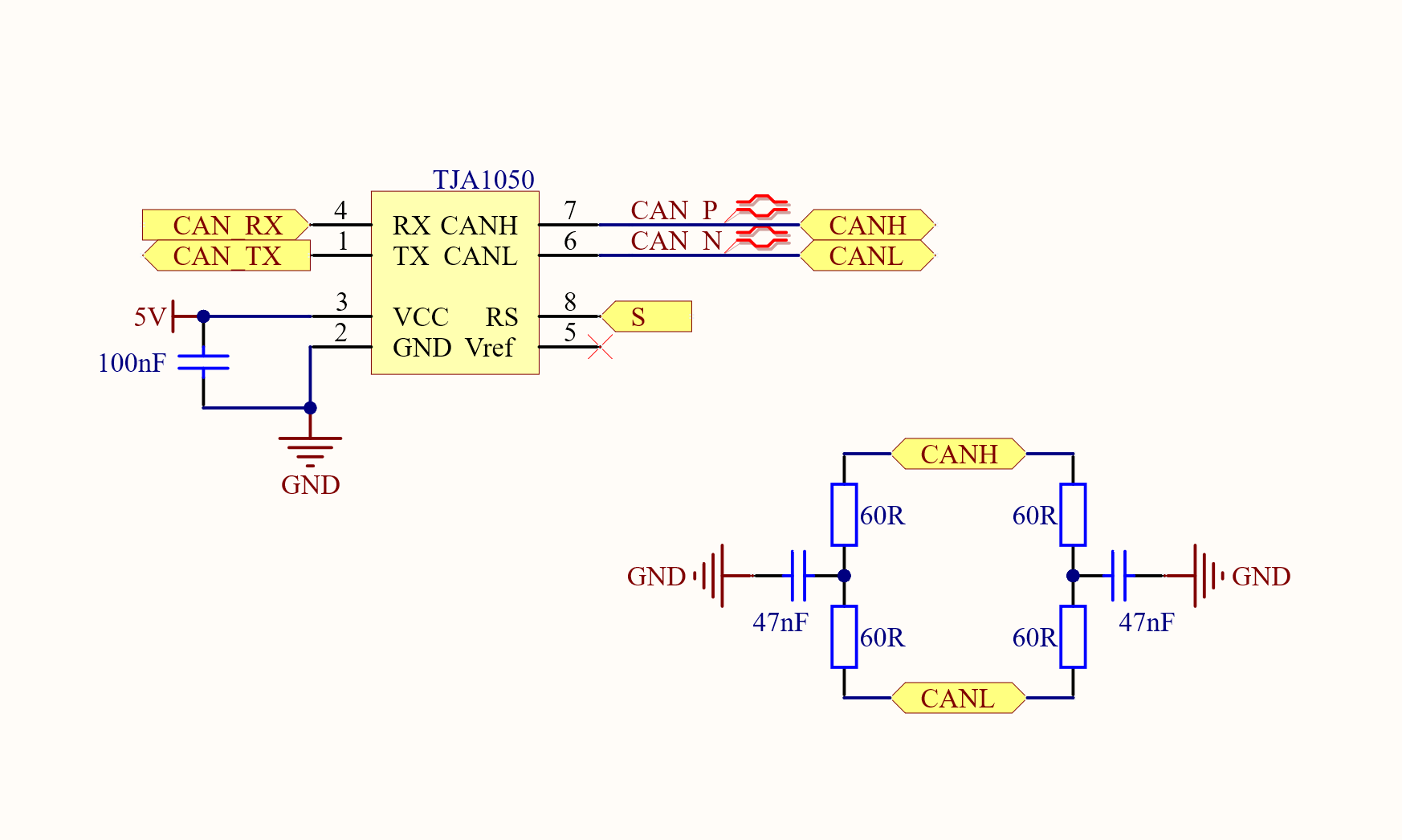
如图,CAN 协议控制器(例如单片机)通过串行线(RX/TX)连接到收发器,在收发器上转换为 CAN 信号(CANH/CANL),并通过引脚 S 来选择高速 / 静音模式。
TJA1050 与 SN65HVD230 的区别#
注意,CAN 信号线在 PCB 布线的时候,要走差分线。终端电阻一般在 CAN 线起始端和末端才需要使用,中间端不需要外加终端电阻
参考与致谢#
文章作者:Power Lin
原文地址:https://wiki-power.com
版权声明:文章采用 CC BY-NC-SA 4.0 协议,转载请注明出处。
基于 SN65HVD230#
完整资料请见 Modularity_of_Functional_Circuit/ 模块设计 - CAN 通信 / 基于 SN65HVD230
特性#
- 由 3.3 V 单电源供电
- 可以连接至少 120 个节点
- 低电流待机模式
- 速率:最高 1 Mbps
工作模式#
SN65HVD230 有三种工作模式(高速 / 斜率 / 静音),由引脚 S(RS) 来控制。一般我们使用高速模式。
高速模式#
将 Rs 强下拉至 GND 以启用高速模式。
斜率模式#
使用 10k 至 100k 之间的电阻,将 Rs 下拉至 GND。具体电阻阻值与速率的关系,请参考数据手册。
低功耗模式#
将 Rs 强上拉至 3.3V
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK