

上位机图像处理和嵌入式模块部署(qmacvisual点线测量)
source link: https://blog.csdn.net/feixiaoxing/article/details/136924278
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
上面一篇文章,我们完成了直线的拟合操作。在实际场景中,拟合之后更多地是需要进行长度的测量。既然是测量,那么就需要两个信息,一个是测量点的信息,这部分目前可以通过设置全局变量的方法来完成;另外一个就是需要直线的k和b,这部分也已经通过直线拟合实现了。所以,点线测量实际并不复杂。而且,真实应用的时候,这里的点往往也是来自于某个固定目标的点,或者是人为设计的某个点。
1、控件位置
控件的位置位于【几何测量】-》【点+线】。当然基础工程、基础流程都是需要配置的,这里不再赘述了。
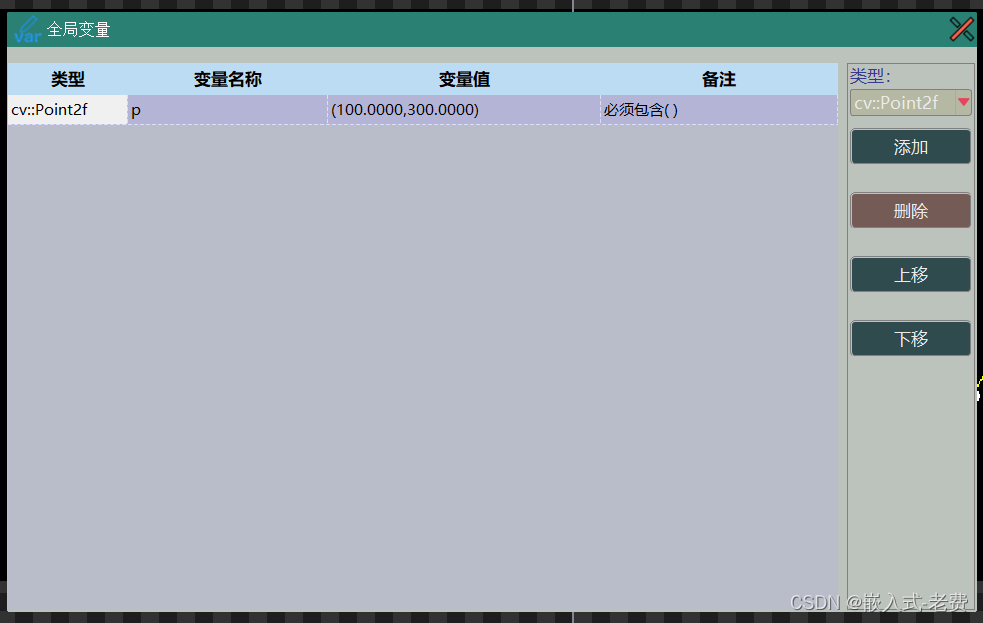
2、配置全局变量
因为点线测距,既需要点,也需要线。线已经准备好了,所以这里只需要设置一个全局变量的点就好了,
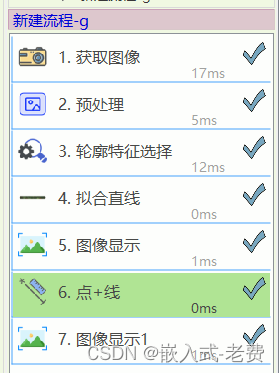
3、整体设计
整体设计,基本上是前面几节课的一个大总结。首先是读取图像,读取结束之后就开始图像预处理。预处理完毕,就可以着手轮廓的提取。有了轮廓,就有了重心坐标,当然也就可以拟合直线了。最后就是用点线插件计算一下交集。
4、点线配置
点线配置,就是我们之前所说的点、线设置。这部分已经讨论过。点来自于全局变量,线来自于直线拟合。大家看一下这个截图就明白了,
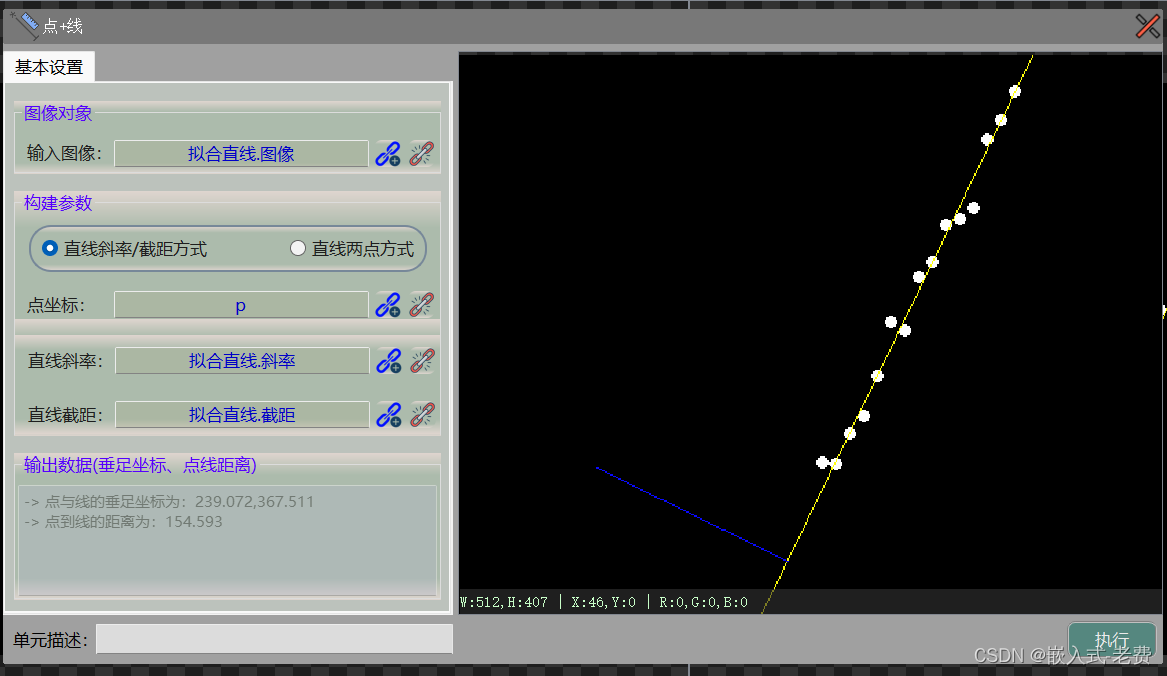
从图上可以明显看出主要的配置。配置的内容集中在点坐标、直线斜率、直线截距三个部分。右侧是单击执行按钮之后的效果。如果没有什么问题,我们就可以在左下方看到对应的打印效果。结果告诉我们,两者之间的交点是239、367,距离为154。
实际应用中,摄像头安装好了之后,一般几个标记点的位置都是固定的,比如这里的P点。甚至于说,这里的P点有好几个。但是它们共同的特点就是,一般摄像头安装好了之后,位置就相对固定了,所以通过这样的固定点当成参考点,很容易计算出这个点到其他直线、圆、长方形的距离。只不过这里为了测试和验证,我们随机设定了一个数值。真实部署的时候,这些点都需要单独标定的。
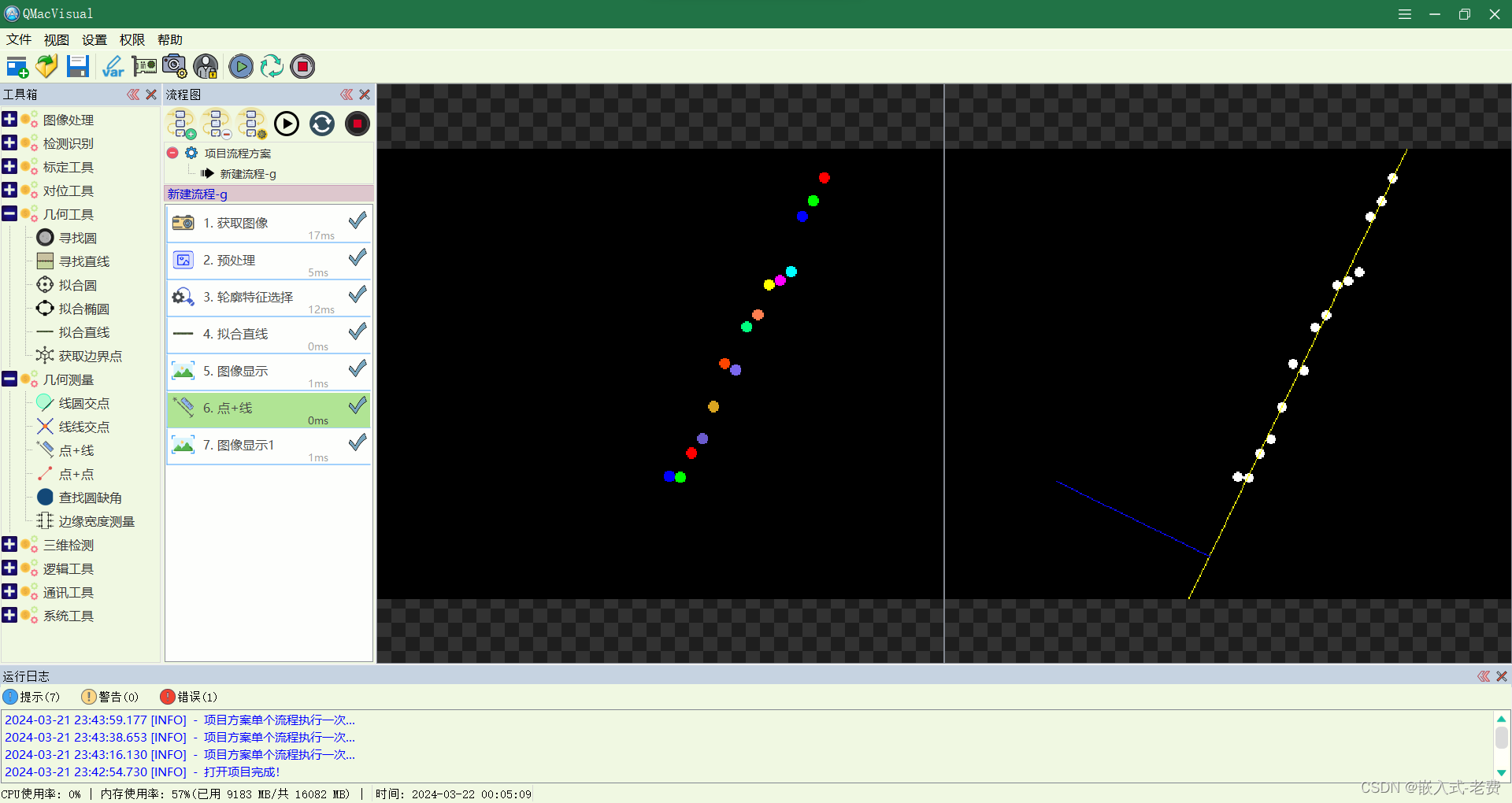
5、丰富一下结果输出部分
在整体设计当中,我们其实还添加了两个图像显示。一个是源图像的显示,一个是输出结果的显示。主要也是为了体现两者之间的对比之处。一幅图像从拿到之后,到出结果,这中间往往还是要走一段距离的。我们今天的demo尚且都需要思考一番,实际部署的时候,遇到的情况只会更烦、更麻烦。遇到这些困难和麻烦的时候,一定要迎难而上,因为实际学习遇到的场景往往都是简单的、单一的,它不能帮助客户解决真实存在的问题,这是最要命的。
另外从我个人的经验来说,还有两点需要注意。第一,就是加强人工智能的学习,未来的硬件只会越来越便宜,算力越来越强,这意味着用软件可以做的事情也越来越多;第二就是加强传感器的学习。图像只是众多传感器中的一环,图像中不确定的信息可以试着能不能由其他传感器来进行补充解决,这很重要。算法固然重要,但是光源、镜头、其他传感器的配合也一样重要,我们要用好图像,但是也不能排斥其他传感器和方法。
Recommend
-
3
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 了解了qmacvisual的配置之后,正常来说,我们需要了解下不同插件的功能是什么。不过我们不用着急,可以继续学习下qmacvisual的三个特色,分别是链接属性、功能拓...
-
4
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 前面我们谈到了qmacvisual的编译、
-
2
上位机图像处理和嵌入式模块部署(qmacvisual条形码识别) ...
-
3
上位机图像处理和嵌入式模块部署(qmacvisual入门)
-
5
上位机图像处理和嵌入式模块部署(qmacvisual二维码识别)
-
3
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 旋转和镜像是图像处理中经常遇到的一个情况。很多时候,摄像头面对物体进行拍摄,未必是正对着进行拍摄的,这个...
-
5
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 前面我们谈到了图像的输入、算法的添加,一切看上去都没有问题。但是这中间缺少了一个重要的环节,那就是结果的...
-
4
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 前面我们说过,qmacvisual本身支持52个控件,但是指望这52个控件可以cover所有的应用场景,这也不太现实。另外,...
-
1
上位机图像处理和嵌入式模块部署(qmacvisual条件判断)
-
0
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 qmacvisual本身提供了图像拼接的功能。功能本身比较有意思的。大家如果拍过毕业照,特别是那种几百人、上千人的...
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK