

前路坎坷:十年内别指望全自动驾驶汽车上路
source link: https://www.36kr.com/p/1867760674329349
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
神译局是36氪旗下编译团队,关注科技、商业、职场、生活等领域,重点介绍国外的新技术、新观点、新风向。
编者按:全自动汽车被认为是汽车的未来。甚至一些厂商和专家声称未来几年之内这种 L5 级的自动汽车就可以规模商用。但现实却在不断打脸,L2、L3 级的汽车依旧事故不断。功率不足、集成问题是汽车走向全自动之路的两座大山。按照现有技术,在未来十年之内,这些问题都很难得到解决,L5 级汽车前面的道路十分坎坷。文章来自编译。
划重点:
真正的自动驾驶汽车至少还需要十年时间
自动化程度越高,需要芯片处理能力越强,功耗越大,但电池改进的速度跟不上
复杂系统的集成让问题变得难上加难
我们到了吗?政府、消费者、工程师都想知道一个问题:汽车世界距离生产完全自主的 L5 级全自动汽车还有多远?
虽然部分专家表示此类汽车可能会在未来几年内上路,但持这一观点的专家人数正在减少。大多数预测都认为,真正的自动驾驶汽车至少还需要十年时间——甚至可能需要更长的时间,因为它也许需要还没被发明出来的颠覆性技术。
危在旦夕的是价值数十亿美元的汽车和科技行业利润,以及无数人的生命。根据世界卫生组织的数据,全世界每年有超过 100 万人死于道路交通事故,尽管有些问题仍有待商榷:比如此类死亡在多大程度上要完全归咎于驾驶员的失误,又有多少可以通过高科技汽车来预防等。尽管如此,据报道,作为到 2050 年实现零道路死亡人数的努力的一部分,欧盟仍计划批准 L4 级汽车(在特定地理区域或特定环境下完全自主驾驶的汽车)的销售。
目前市面上还没有这样的汽车。目前采用了 L4 级技术的有 Waymo 共享汽车,通用汽车子公司 Cruise 的出租车服务,以及其他一些项目,但消费级的车辆仍未采用。L3 级,也就是系统遇到问题时需要驾驶员接管的汽车,目前可以在德国的部分梅赛德斯车型以及日本的少数本田传奇车型中找到。特斯拉以及其他可供消费者使用的高科技汽车所采用的的高级驾驶员辅助系统 (ADAS) 通常被归类为 L2 级。
在各种路况下都可以自动驾驶的 L5 级汽车还没有出现。此外,这种局面何时会改变也还不清楚。不过各种预测倒是无处不在。今年早些时候,Oculus VR 前首席技术官,现为公司技术顾问的“卡神” John Carmack 与 Stack Overflow 联合创始人 Jeff Atwood 打了一个赌,赌注是 10000 美元的慈善捐款,赌局是到 2030 年,L5 级的汽车将在美国的主要城市向乘客提供商业服务。Carmack认为可以, Atwood 觉得不行。特斯拉首席执行官埃隆·马斯克曾多次发表声明,预测特斯拉将实现 L5 级的自动驾驶,但他还没能证明这一点。
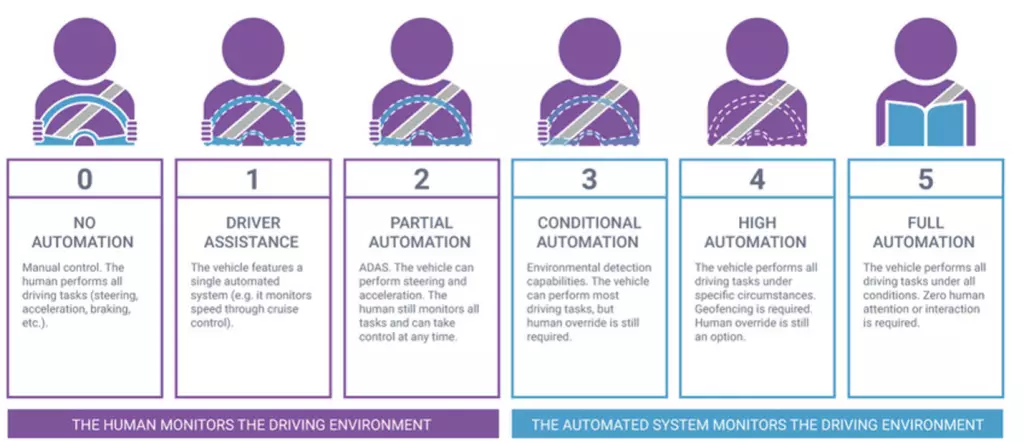
图 1自动驾驶的不同阶段(0级为无自动化,1级为辅助驾驶,2级部分自动化,3级有条件自动化,4级高度自动化,5级全自动)。资料来源:新思科技
其中一个最大的挑战是协同。一些非常复杂的系统需要作为单一的集成系统协同工作。由于这些先进技术仍然很新,而且还在不断发展,所以协同的难度变得更高了。
新思科技(Synopsys) 嵌入式软件和解决方案高级总监 Marc Serughetti 表示: “在电动汽车、ADAS(高级驾驶辅助系统) 的推动下,现如今的市场正在朝着自动驾驶、汽车互联与共享乘车的方向发展。 OEM 面临的挑战是,鉴于这些都是消费者想要的东西,怎么才能提供支持所有这些功能的产品?在过去,汽车制造商的做法是,OEM 会说,‘这属于新功能。我得做个新硬件来实现这个功能。但是现在的趋势变了,你不能这样做了。这种做法失效了。他们再也不能说,‘我需要这个功能。我来添加一个具备这个功能的新的电子控制单元。不能这样了,因为这些功能没法独立工作。现在的功能都是相互关联,相互依存的了。”
那么,怎么才能实现所有这些呢,尤其是当有这么多的产品处在不同的开发状态、而创新和消费者需求又在不断涌现的情况下?Serughetti 说: “很多公司,比如丰田和其他公司,都在讲软件优先。心态上要转变,首先要考虑软件,以及软件会如何影响产品和交付。至于硬件,硬件有多层内涵。首先,硬件架构不能跟以前一样了。ECU(电子控制单元)不可能到处部署,每个都有自己的功能了。汽车的电气/电子架构需要改变。所以大家才要讨论中央计算、区域网关(zonal gateway)以及域控制器。硬件正在进行着全面演进,而这些都是为了支撑软件。”
不过,将所有这些新组件组合到一起需要时间。 Expedera 营销副总裁 Paul Karazuba 认为,要想实现全自动驾驶,还需要做很多工作,首先是处理大量流数据得更快、更节能。他说: “光从硬件的角度来看,在汽车部署 L5 所需的平台并不存在,今天的解决方案其实也没法靠扩展来满足 L5。L5 需要一定数量的 AI 处理。处理能力可能需要在每秒 1000 到 3000 兆字节(TOPS,看具体是谁处理)之间。当今汽车最先进的 AI 处理解决方案的性能大概是 250 TOPS。

图 2:人工智能在自动驾驶汽车当中扮演的角色(感知、预测、规划、控制)。资料来源: Expedera
Karazuba 说,这个级别的汽车,处理器需要消耗约 75 瓦的功率,这会产生严重的扩展问题。 “如果苹果一下所需的扩展能力,这些芯片的性能必须扩展 4 到 12 倍,这意味着规律也要相应扩展。 75 瓦的功率差不多已经是极限,再高的话就需要主动冷却芯片了,而汽车制造商已表示他们不想主动冷却汽车内置的电子设备,因为实现起来既昂贵又增加了重量。”
他说,即使可以将当前的解决方案扩展到 3000 TOPS,这种做法做也会消耗掉相当于当今一辆电动汽车高达 1% 的电池容量。 Karazuba 表示,一种变通方案是将多个芯片彼此相邻放到一起,但这样会产生空间和成本问题。
“按照今天的硅市场,我们讲的是好几百美元——每块芯片可能会接近 1000 美元——一辆车大概有四块这样的芯片,或者可能有 12 块那样的芯片。你也没法把面积已经非常大的芯片的数量增长 4 倍或 12 倍。只有进行分解处理,要么将处理转移到汽车内的多个地方,要么转移到小芯片(chiplet)模式之类的东西上。”
这还只是一部分的成本。所有这些新特性和功能都要用电,而电动汽车的电来自电池。但电池技术的改进速度很慢,每年只有约 5% 至 6% 的改进率,而需求又在爆发式增长,不仅要更快,要处理的数据还更多,随着车辆自动驾驶的级别增加,这个差距会越拉越大。
电池本身是一个很大的变数。电池很重,充电需要时间,而且储能有限。因此,当今可用的最佳解决方案是提高电子设备的效能,靠简单粗暴地增加电池来提高续航里程。这导致成本和复杂性的增加,因为电池需要冷却,需要妥善管理,需要保护得当,要够坚固,可承受十年或更长时间在恶劣路况和环境条件下行驶。虽然距离 L5 级自动驾驶似乎还有很长一段路要走,但对于可以给汽车增加多少智能化而言,电池仍然是限制因素之一,也是另一个没有明显的最佳选择的领域。
英飞凌高级工程师 Felix Weidner 说:“电池模块越来越大,所以你会尝试给电池组部署更高密度的电池,因为这些电池占用的空间更少。方形电池曾经是最容易封装的电池,尤其是一开始方形电池就已经被大量使用。但我们现在也经常能看到软包电池,而特斯拉则使用了圆柱形电池。大家都在努力优化电池的体积能(volumetric energy)。但这也需要做出取舍。方形电池外壳合适,不需要太多的设置。而软包电池就得配备坚固得多的外壳。那么现在,你是用方形电池来提高空间利用率呢,还是继续推动能量密度的极限?最重要的一点,这些电池内的化学成分也在不断变化。第一款 BMW i3 电池采用的是 NMC 电池(镍Ni钴Co锰Mn酸锂电池)。现在大家又开始讲 LiFePO (磷酸铁锂)了。然后他们又想尝试在不过多降低电导率的情况下减少电解质,并试图通过在内部混合部分硅来增加阳极表面积,来对阳极做出调整。所有这些情况都在不断变化,而这些都会影响到电池封装的方式。”
需要消耗的电力太多限制了汽车的续航里程。但全自动驾驶汽车需要的电能甚至还要多,因为它需要处理大量数据。Arteris IP 高级技术营销经理 Paul Graykowski 表示:“现在植入到汽车的复杂 SoC(片上系统)的数量正在快速增长。现在的平均数是 23 个,而且在不久的将来可能会增加到 26 个。那还是 L2 级或 L3 级的。L5 级需要多少我甚至都无法想象。如果 SoC 的数量比现在翻倍的话,我不会感到惊讶。这意味着我们对功耗必须非常小心,因为功耗就是一切。”
按照 Graykowski 的说法,行业还必须弄清楚另一件事,那就是车对车的通信问题,这样道路上的车辆才可以就各自的位置和速度相互通信,并做出相应的调整。
西门子 PLM 软件混合和虚拟系统副总裁 David Fritz 认为,汽车行业将在 2027 年或 2028 年左右接近 L5 级的水平。“为了证明相对少量(一年 1 个亿)研发生产成本的合理性,你得寻求收益最大化。多年来,我们一直在谈论 ECU 的整合。现在他们说,‘我们要制造一块芯片。不过,这块芯片要取代 12 块电路板、47 个分立集成电路、17 块 SoC ,它们会全部集成到一起。’现在我们正处在开始产生好的财务影响的阶段。而且因为不需要与 12 家不同的软件供应商、12 家不同的硬件供应商合作,所有这些令人头疼的问题都将迎刃而解。到时候,这种做法在方法论、开发、团队规模以及能力方面的好处将开始显现。行业将朝着垂直整合的方向发展。”
但是垂直整合和 ECU 整合不会一蹴而就。与此同时,随着这些活动的发展,ECU 的数量可能会继续增长。Fritz 说,到了 2024 年时,汽车的 ECU 数量预计会与今天一样,或者略高一些。
他指出:“OEM(原始设备制造商)差不多需要后退半步。他们会说,‘我要增加这个功能,所以还需要另一个 ECU。但接下来他们会将其中的四个其他的 ECU 集成到那个 ECU 上。这是一种演进的做法,因为人们非常害怕与原先的习惯完全不同。他们怎么才能在一两步之内到达那里,同时与领先者的距离又不会进一步被拉大?”
根据 Rambus 和西门子今年 6 月份发布的白皮书,哪怕是实现 L4 级的自动驾驶可能也需要“对现有技术进行大规模重构”。全自动可能会涉及到汽车以太网、车联网 (V2X) 连接以及域控制器单元。为这些系统以及其他系统提供动力的芯片必须在车辆的整个生命周期内安全、稳定和可靠。
但做出这样的芯片说起来容易做起来难。根据那份白皮书,“与其他商用硅片设计相比,用于汽车用例的芯片面临着更高的环境挑战,比方说温度、湿度以及振动导致的外观损坏。因此,稳健、自动防故障及/或安全操作(fail-operational)系统对汽车设计来说至关重要。安全与安全保护是靠多种工程活动和实践来实现的。”作者认为,工程师必须假设芯片会发生故障,因此必须做好产品的设计和验证,让汽车即使发生了这些故障仍能正常工作。在某些情况下,一种可能的解决方案是使用专为汽车环境制造的 CMOS 节点。
当然,专家也没法预测未来,而且在不久的将来,重大的技术创新总是存在着显著改变时间线的可能性。这样的时机还取决于人们如何在 SAE (美国汽车工程师协会)制定的指导方针下定义 L5 级自治是什么样的。比方说,理论上有能力在人类绘制的任何道路上自动驾驶,但仅在主要城市内行驶的车辆是否符合 L5 级汽车的条件?还是说那其实是 L4 级车辆?
不管此类技术如何分类,必须在试验区域之外行驶的车辆都会牵涉某些技术挑战。Arm 负责汽车与物联网业务线汽车合作伙伴的总监 Robert Day 表示:“自动驾驶汽车要想成为司空见惯,而不只是在初始试验城市出现,需要大量价格合理的传感器技术,以及更先进的软件和计算能力。在将自动驾驶推向大众市场时,行业面临的主要挑战之一是在车辆的功率、成本和发热约束范围内提供所需的计算性能。此外,随着车辆架构的发展,开发人员还将面对越来越复杂的代码。”
这些东西很多要取决于不同系统对车辆功能的重要性。 Day 说:“随着这些计算系统变得更加集中,需要对在这些系统上运行的软件的不同关键级别进行额外保护。还要有一个组件来帮助部署全自动驾驶汽车,它可以限制汽车操作的运行设计域(ODD)。通过限制地理位置、环境条件(雨、雪、雾等)以及车辆的运行速度,ODD 降低了车辆必须处理的环境的复杂性,从而可以更快地将无人驾驶汽车部署到我们的道路上。”
Cadence 负责解决方案和生态体系的高级集团总监 Frank Schirrmeister 表示,他预计按照 Carmack 和 Atwood 打赌设定的指南驾驶的车辆将在未来几年内出现,而且使用的是现有技术。不过,他预测针对此类汽车的基础设施要到 2030 年才能投入使用,而且消费者可能会在几年后才愿意采用这种类型的自动驾驶技术。 Schirrmeister 指出,Cadence 的一份报告显示,虽然消费者普遍认为超连接会对他们的生活产生积极影响,但也有很多人不喜欢与全自动驾驶和一些较低级别的自动驾驶相关的某些功能。
Schirrmeister 说:“一旦牵涉到控制权时,消费者对采用会有些犹豫。人们希望自治可以禁用。他们其实只是想要建议。他们不希望汽车把全部的事情都帮干完。因此,主流采用可能需要更长的时间,在我看来,比较现实的时间是 2030 年或 2040 年。”
主流采用还需要解决基础设施问题。 Arteris IP 的 Graykowski 表示,极其“智能”的汽车需要同样智能的城市来为这些汽车提供必要的信息。 “这不仅仅是一辆会独立思考的汽车的问题。一定是整个城市都要对汽车说话,汽车也要对城市回话。”
到头来,车辆要真正实现自动驾驶,需要做出重大改变。
新思科技的 Serughetti 表示:“在计算方面,在它们能让你做的事情上,比方说 AI 支持以及其他高级功能方面,你要有非常强大的芯片。这需要对软件进行修改,因为现在你已经拥有了各种计算元素,希望利用这种计算能力,假设你有一个区域架构。你说,‘我有一个不同的区域控制器,我在尝试进行计算。为什么我不能用其中一种区域架构提供的计算能力?如果我的算力不够的话,为什么我不能利用汽车另一部分的计算能力?’”
即便如此,实现全自动的时间表仍然不确定。复杂系统的开发很难,但是当这个系统的功能需要集成,而且与其他系统需要相互依赖时,这件事情就会变得难上加难。
译者:boxi。
本文来自翻译, 如若转载请注明出处。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK