

论文:在线游戏玩家坐标聚类分析
source link: https://shartoo.github.io/2020/02/07/paper_onlinegame-player-landmark-cluster/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

1 玩家聚类
首先,我们提出一个方法来检测坐标,然后描述如何使用MDS(multidimensional scaling)和一个称为prefuse的方法计算坐标之间的转移权重概率(weighted transition probabilities between landmarks(WTPL)),这些用于可视化玩家聚类。研究证明,MDS在多维数据集聚类时中要优于SOM。在prefuse阶段,我们使用一种等价于MDS的力导向(force-directed)的模型。文中的坐标点(Landmark) 与普通的定义不同。
1.1 坐标(landmark)检测
首先,要分析的地图划分为m×nm×n的网格,假设有N个玩家遍历地图。其中用户经过网格(i,j)(i,j)的数目标识为 vi,k(k)vi,k(k),我们将大部分玩家都高频率经过的网格定义为坐标。对于网格 (i,j)(i,j) ,玩家经过的分布可以用加权熵H来表示
检测坐标L的算法如下
- 所有的网格为未标记状态,所有坐标都是空
- 在所有未标记网格中,将有最大H的网格标记为1,并将此网格加入到坐标集中。然后将其8个邻居也标记为1。 此处标记邻居是防止被连续标记。
- 重复步骤2直至坐标集达到L个
1.2 坐标之间的加权转移概率
对于上面算法检测到的L个坐标,用户k的加权概率转移矩阵X(k)X(k)如下
上式中,Pa,b(k)Pa,b(k)为玩家k从坐标a移动到坐标b的加权转移概率。其累加公式为
$$
P{a,b}(k)=\frac{c{a,b}(k)}{\hat c{a,b}}\frac{c{a,b}(k)}{C(k)}\quad 其中c{a,b}(k)为玩家从坐标a移动到坐标b的次数,\hat c{a,b}(k)=argmaxkc{a,b}(k)\quad C(k)=\sum {i=1} ^L\sum {j=1} ^Lc_{i,k}(k)
当前版本中为计算X(k)X(k)中各个元素值,玩家所在位置(coordinate)由其轨迹的附近坐标(landmark)来表示。假设首先已经检测到5个坐标(A,B,C,D,E)(A,B,C,D,E),那么玩家的轨迹可能是BBBAAAACEEEEBBBAAAACEEEE,其转移序列为B→A→C→EB→A→C→E。当前不考虑自循环转移序列,如A→A,B→BA→A,B→B
1.3 Multildimensional Scal(MDS(多维缩放))
为可视化基于其运动模式的玩家聚类,我们使用简单的分类MDS(CMDS(论文1))。CMDS的输入为矩阵D,给定一对玩家的差异性,然后输出一个坐标矩阵,矩阵以配置了最小损失函数来保留两点之间的距离。当前论文中矩阵D中的第ijij个元素为X(i)和X(j)X(i)和X(j)之间的欧氏距离。我们只选取结构坐标的前两个维度,并使用Matlab中的统计工具包中的cmdscalecmdscale函数来计算CMDS。
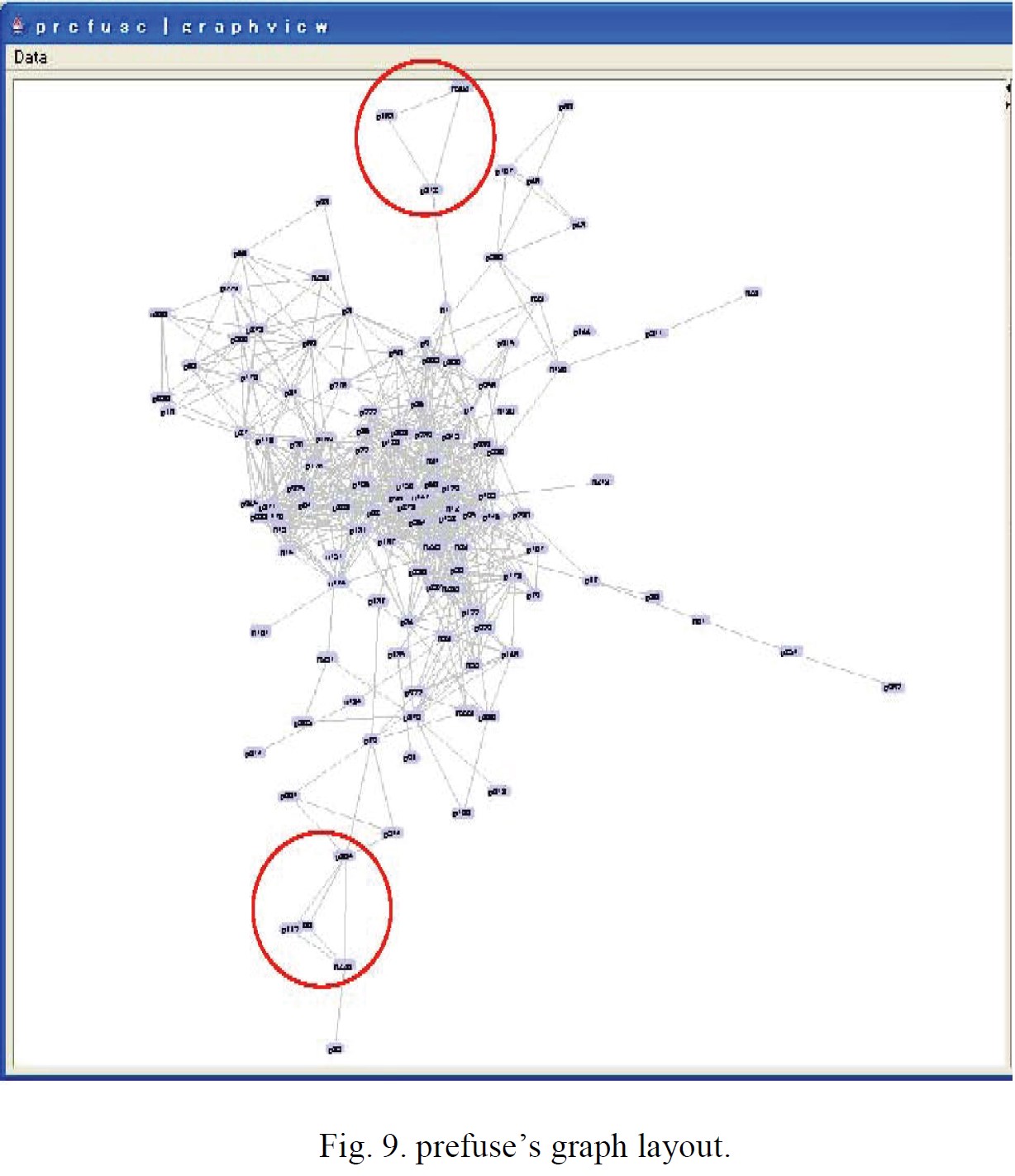
1.4 prefuse(预测)
我们同时在预测阶段中使用一个力导向的模型,其输出一个图分布,图中每个节点代表一个玩家,节点之间的连接长度与两个节点间距离成正比。为减少计算复杂度,我们提前删除节点间距离小于一定阈值的,当前可以设定为所有节点距离中值的0.5.在预测阶段用户可以交互地操作图节点布局来定位聚类簇
2 结果与讨论
使用的是游戏ICE的玩家移动日志数据
2.1 游戏ICE
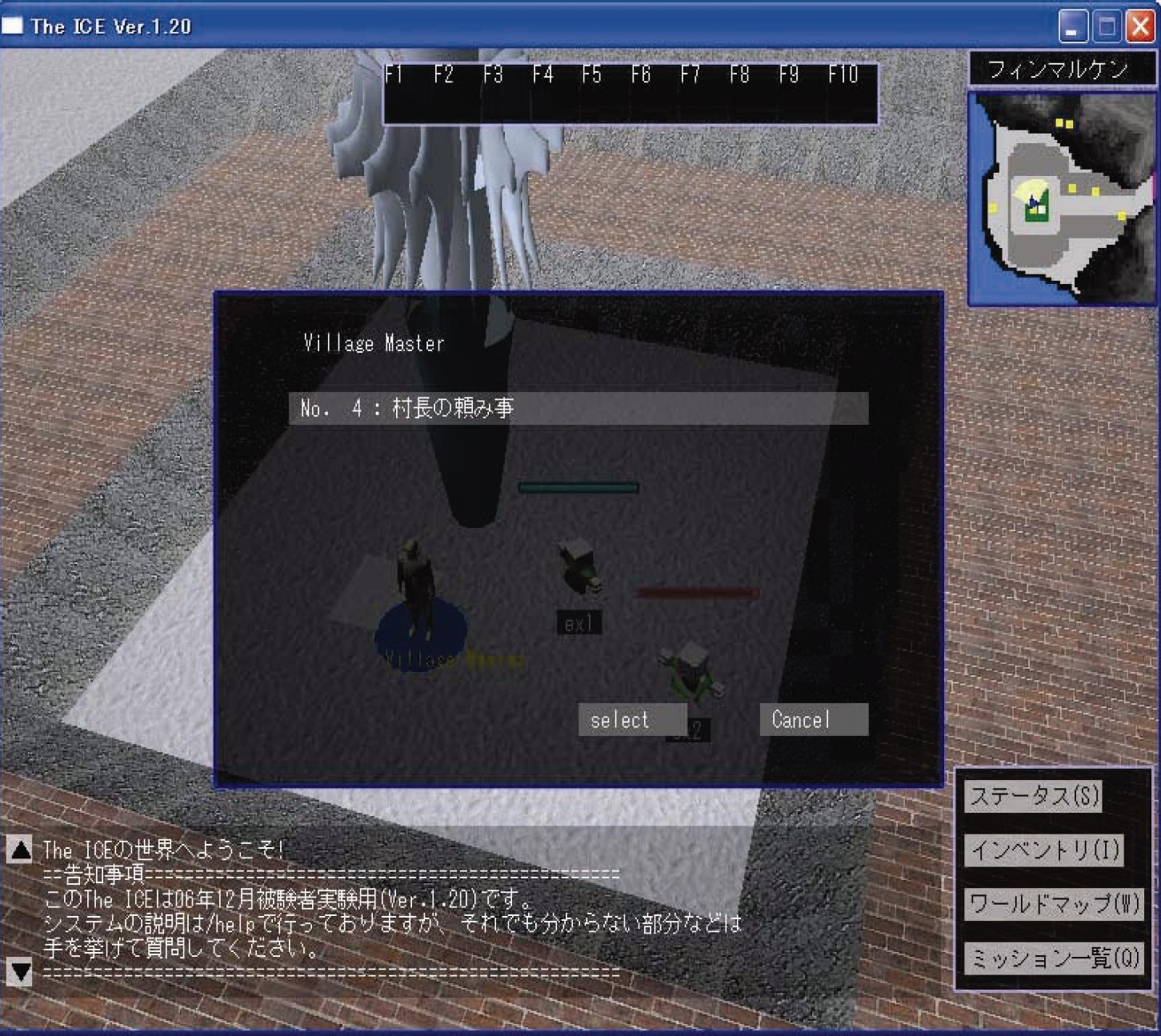
游戏截图如下左,分析所使用的是图右(图中有7个固定位置的NPC),图尺寸为600×600600×600像素。玩家可以通过点击目标点像素来移动,当前地图被划分为50×5050×50的网格。

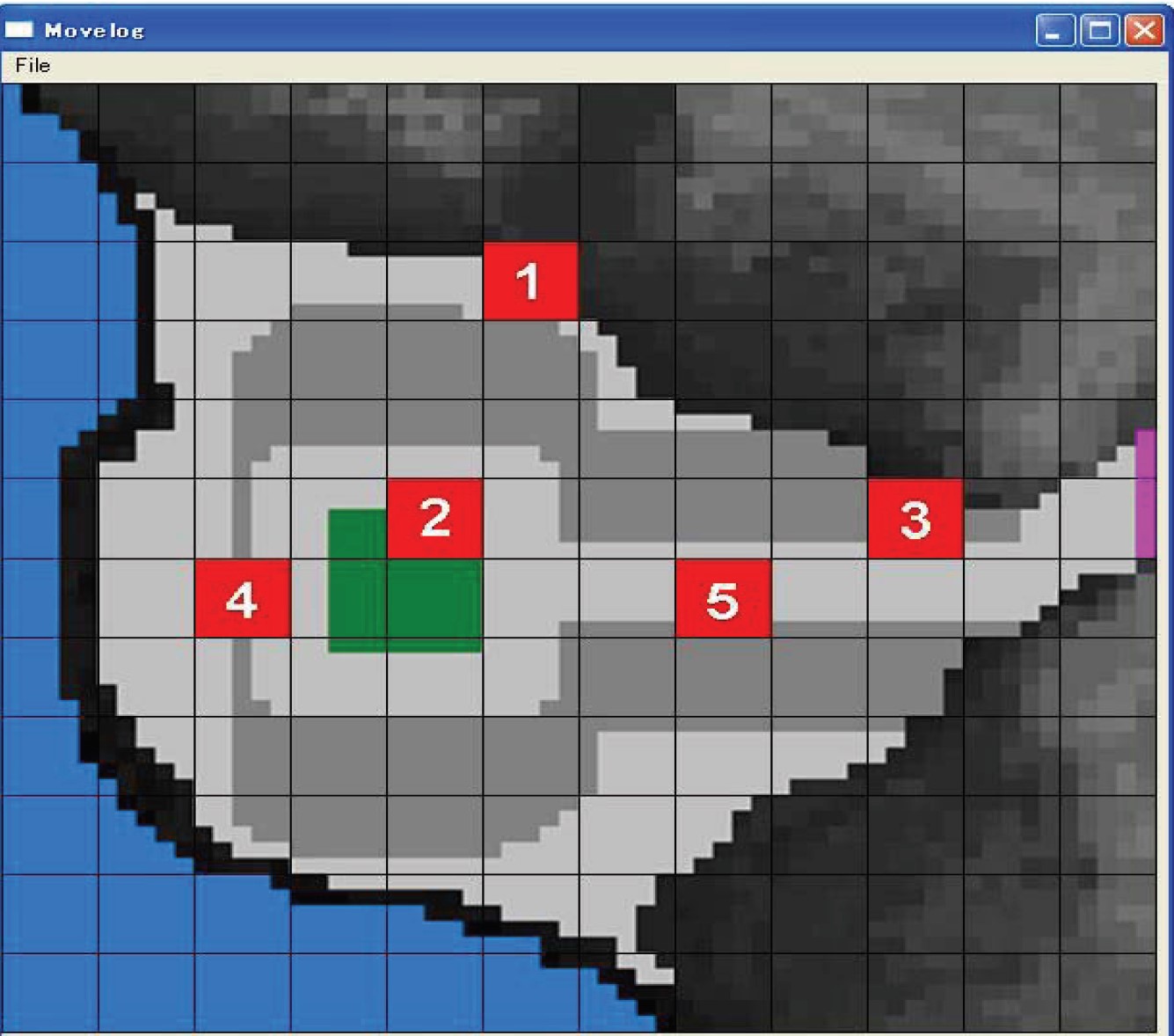
下图展示的是当L=5L=5时,检测坐标(Landmark)的结果。坐标1:靠近Marlen和Lagi;坐标2:所有玩家进入地图的位置;坐标3:Gelda所在位置;坐标4:位于Amanda和Villege Master之间;坐标5:同时靠近Shop和Gelda。这些坐标对所有玩家都是重要的,因为他们要进入地图、接收任务、购买物品。
有20个玩家,17个男性,3个女性游戏时长45分钟,完成一些简单的任务,如与NPC交易物品、运送物品到NPC,从怪物那收集物品。下图画出了所有玩家在二维空间中由CMDS检测出来的结果,节点$pi代表第代表第i个玩家。注意有个离群点个玩家。注意有个离群点p{11}$,因为所有玩家都在右边,我们剔除掉此玩家然后重新计算结果得到下图右边。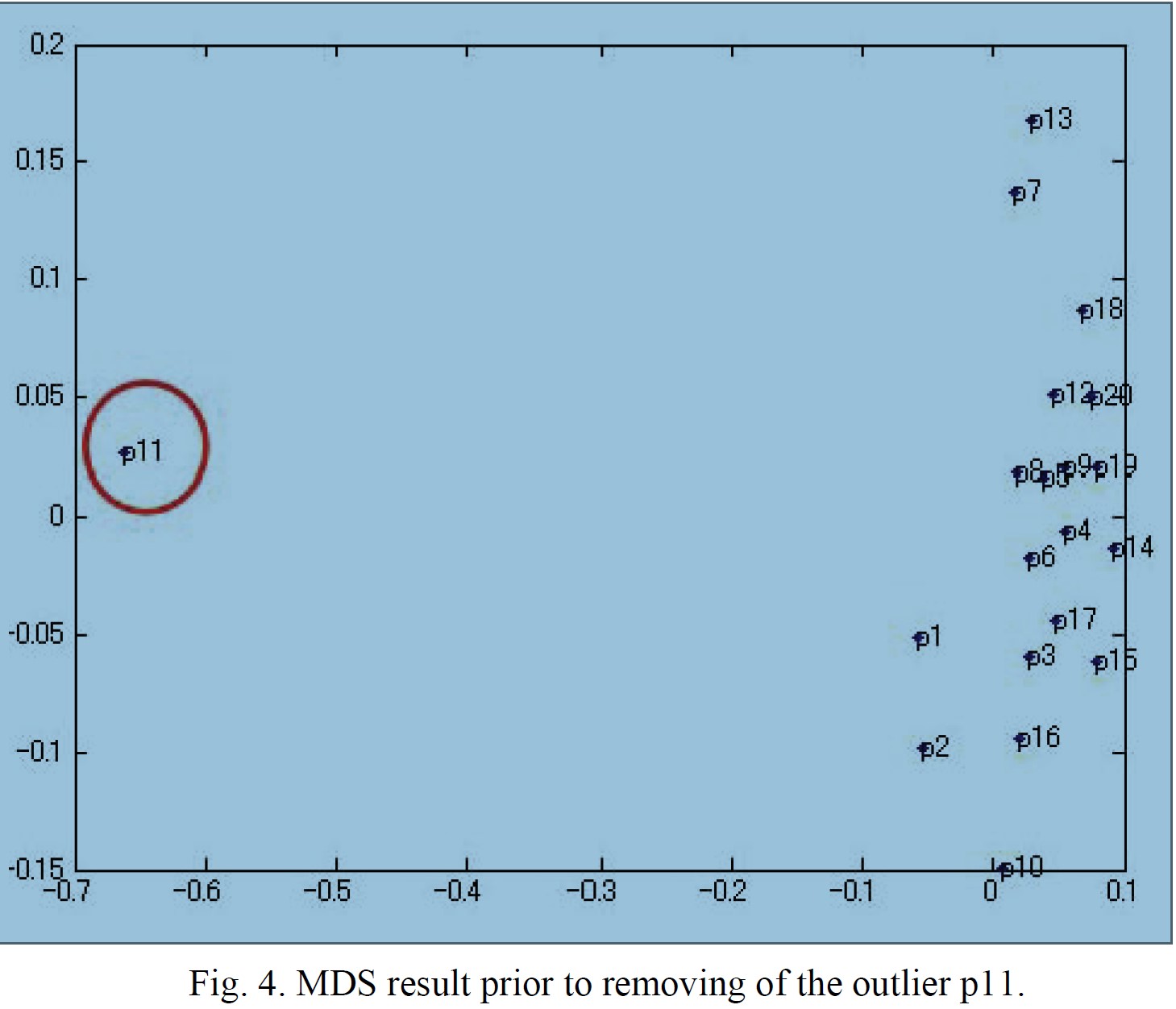
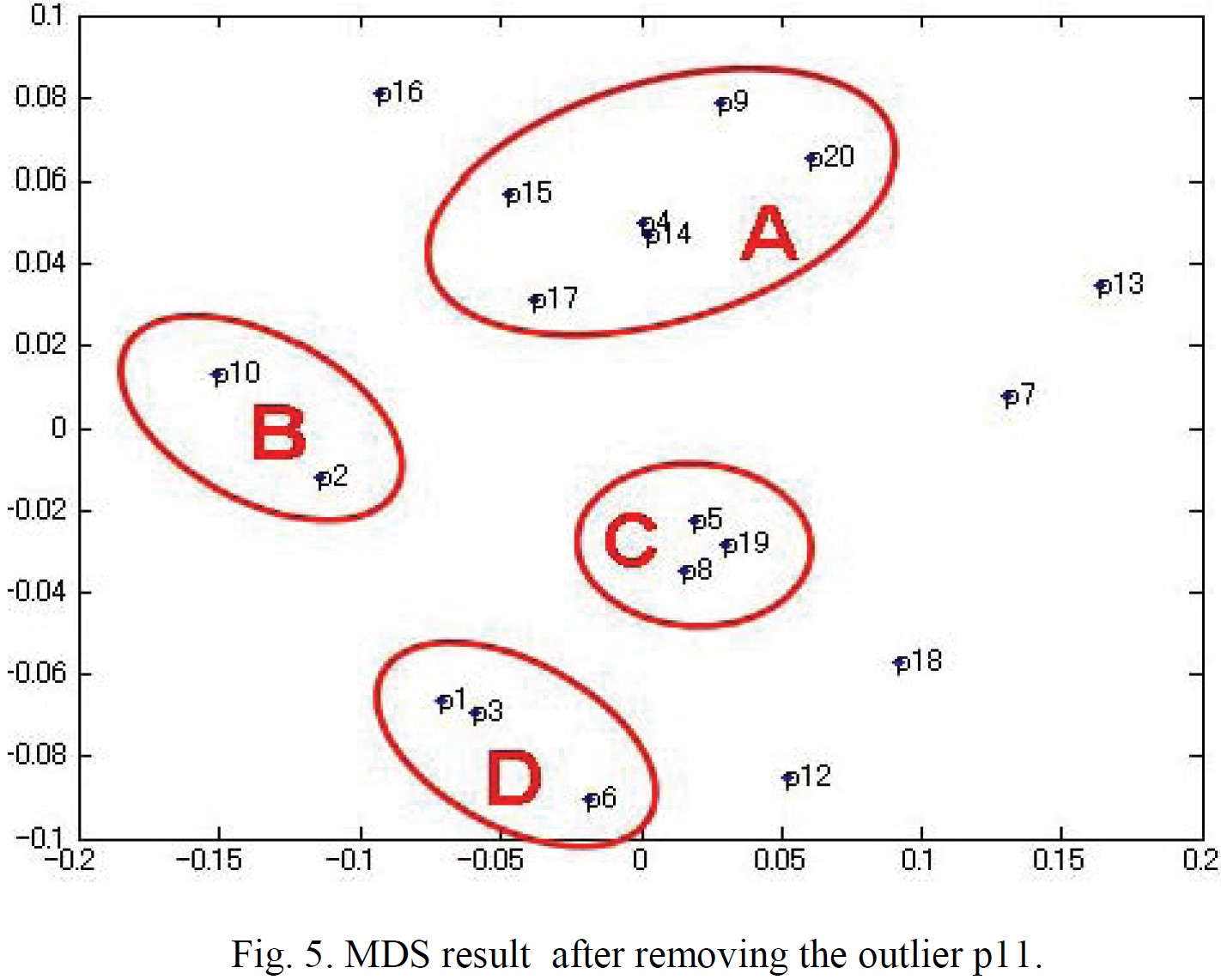
上图右可以看出,大部分玩家可以被划分到4个聚类(A,B,C,DA,B,C,D)中.每个聚类都有不同的运动模式。每个聚类的运动模式由簇中每个元素的平均的XX表示,并由一个与XX的值成正比的箭头可视化。下图展示了这种可视化结果,聚类A中的玩家运动模式主要是在坐标2到5和3到5之间移动。聚类簇B中的玩家主要活动模式是2到4和1到2之间移动;聚类簇C中的玩家是在3到5和2到5,聚类簇D中玩家主要是1到2和2到5之间。
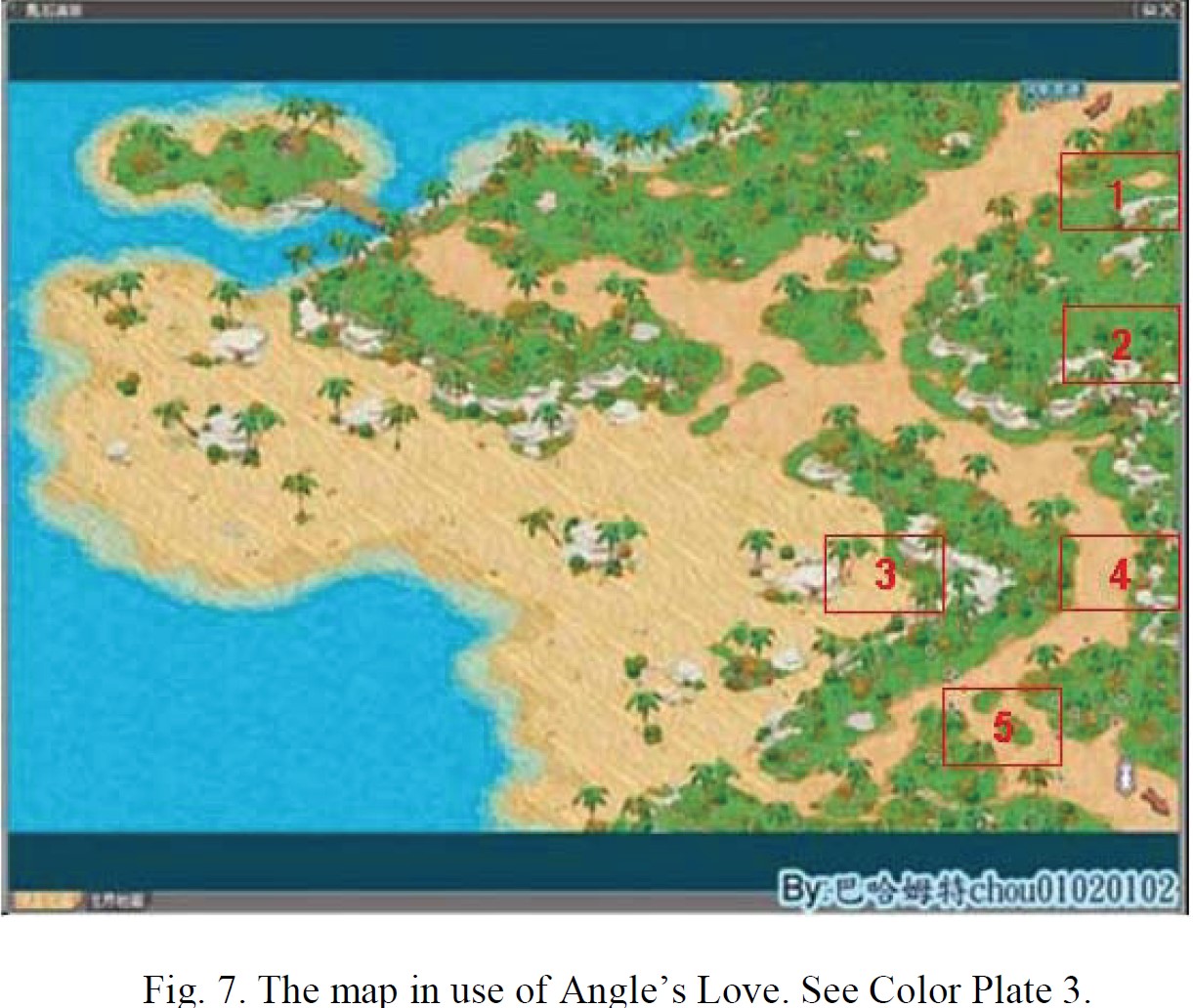
2.2 游戏:天使之爱(Angle’s Love)
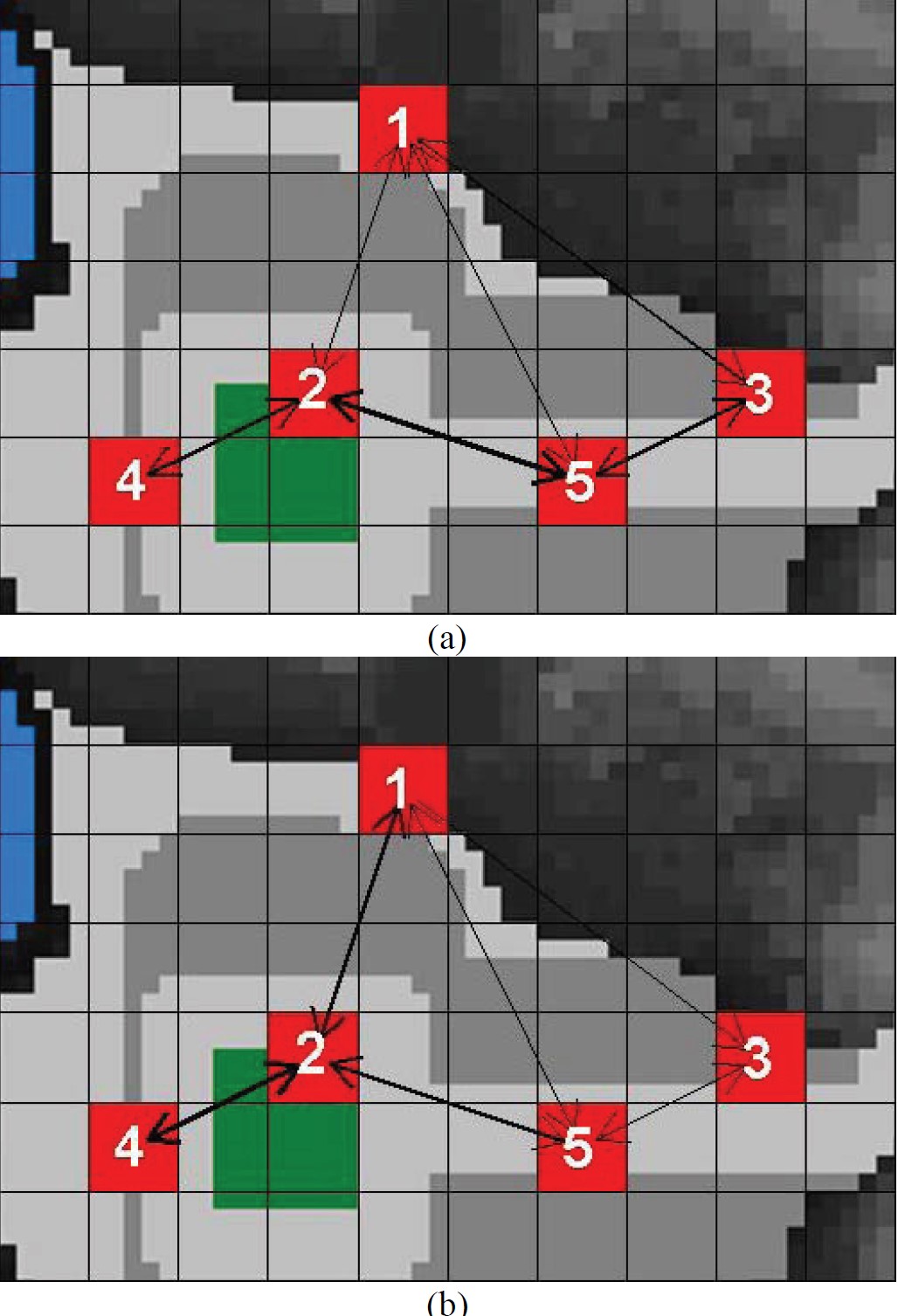
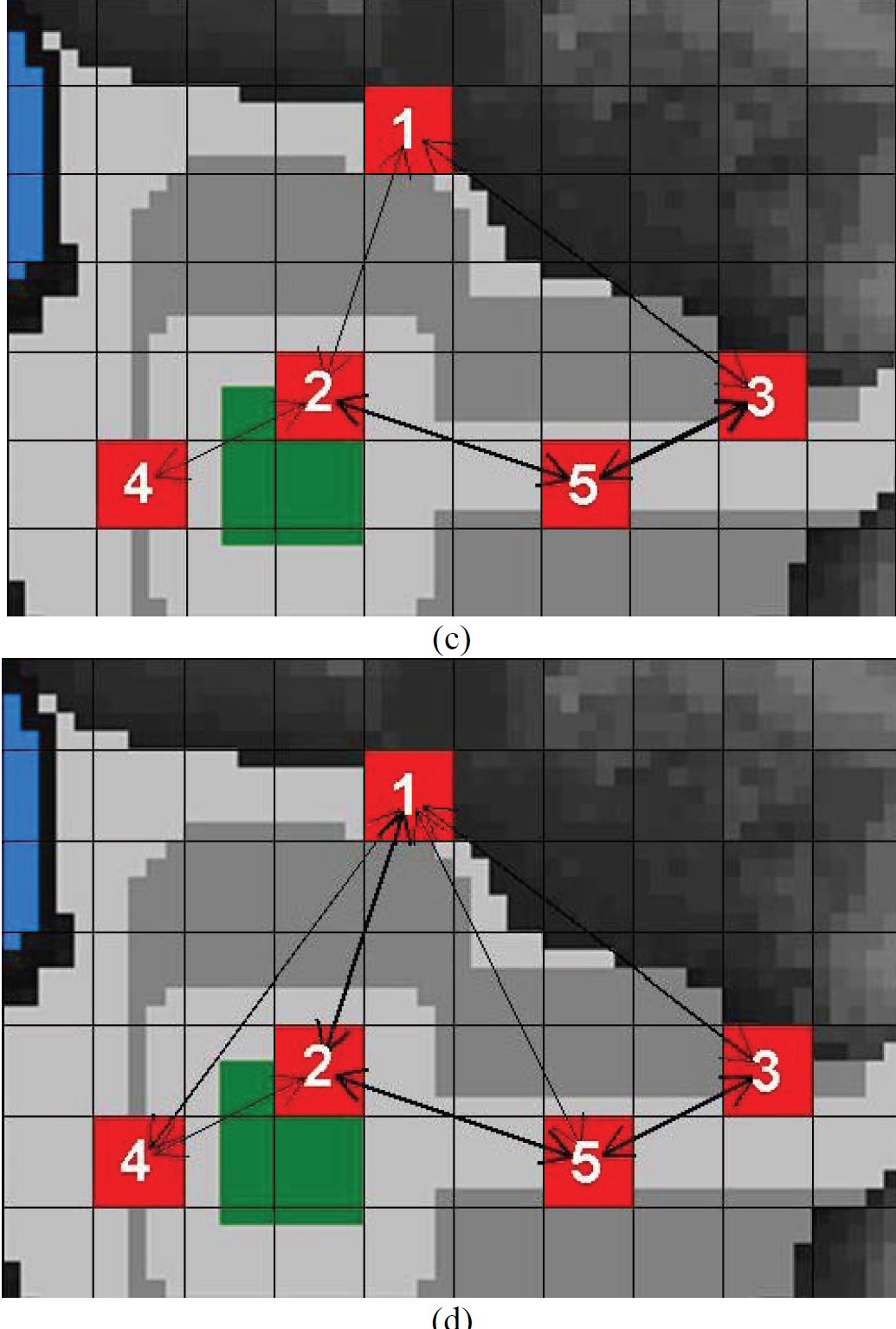
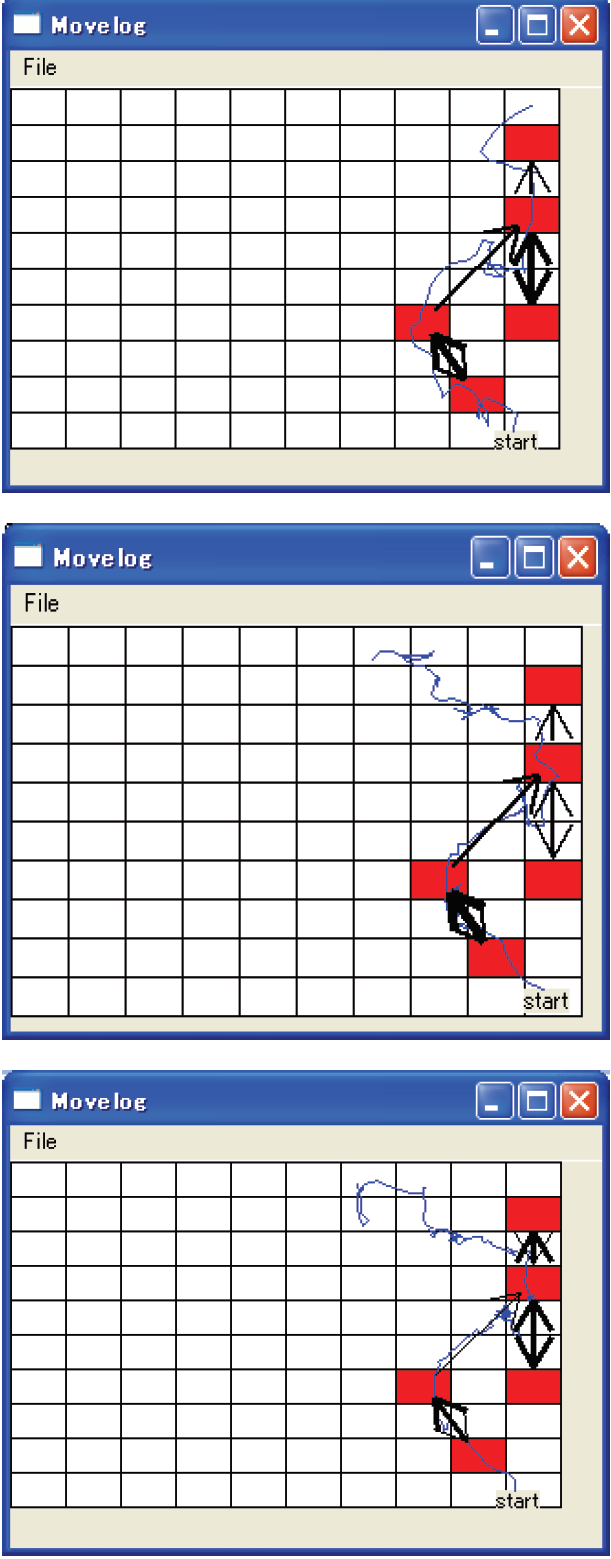
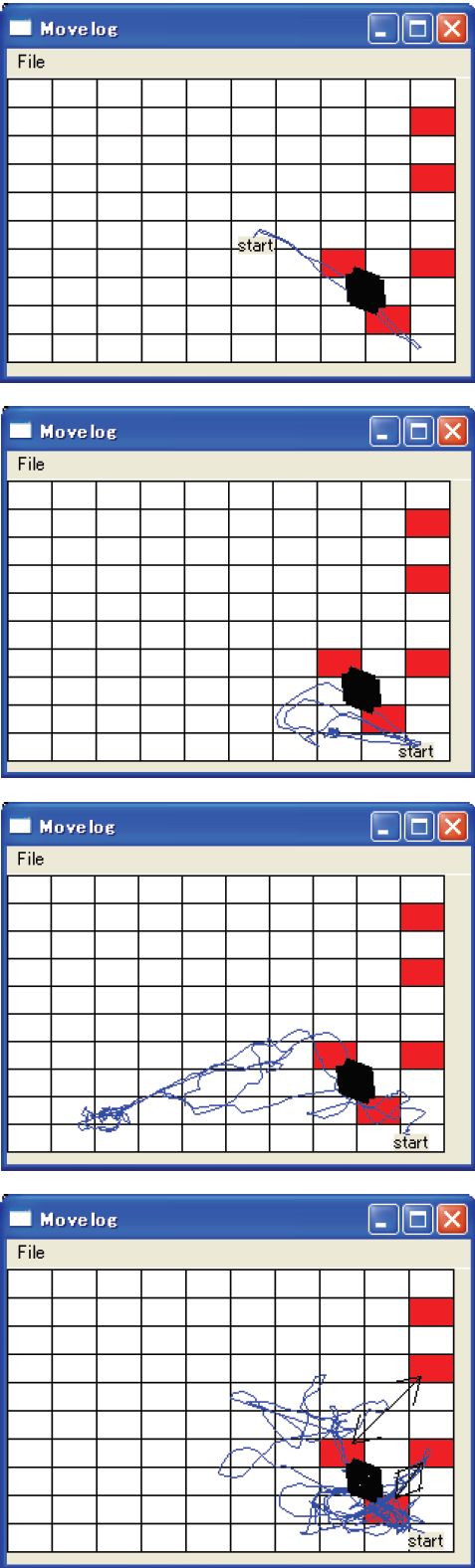
下图7是游戏截图和对应的检测到的5个坐标点。图尺寸为300×190300×190像素,图被划分为10×1010×10网格。由397个玩家在此图中游戏,大部分从此图进入其他地图。这5个坐标中,其中的3个即1,2,3是障碍物,玩家遇到之后必须返回。这也解释了为什么它们会被检测为坐标点(Landmark),因为玩家要在这三个点之间来回两次,过去、返回。
下图展示了预测结果的图布局。图中形成了一个大的聚类簇,表明大部分玩家都有类似的运动模式,但是也可以看到顶部和底部各有一个3个玩家和4个玩家组成的小得多得聚类。
进一步查看这两个小聚类簇,下图左边是顶部的三个玩家在坐标点之间的移动轨迹,右边是底部4个玩家坐标点之间的移动轨迹,可以看到它们的移动轨迹相似。
- D. Ashbrook and T. Starner. Using GPS to learn significant locations and predict movement across multiple users, Personal and Ubiquitous Computing,
</div
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK