

CorrNet3D:基于无监督的非刚性点云配准网络 (CVPR2021)
source link: https://zhuanlan.zhihu.com/p/410803926
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

CorrNet3D:基于无监督的非刚性点云配准网络 (CVPR2021)
作者:陆陆, 首发:CorrNet3D:基于无监督的非刚性点云配准网络 (CVPR2021)
注1:文末附有【点云处理】交流群加入方式
注2:三维点云系统课程:https://mp.weixin.qq.com/s/uJ34xjWjAFCzDDduoo0ixA
注3:彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化:https://mp.weixin.qq.com/s/lfA-xwPNvR3-laemEGBAqQ
注4:彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM+LIO-SAM) :彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM+LIO-SAM)
一、引言
点云因其能够精准地反映物体的真实尺寸和形状结构而备受人们青睐,被广泛应用于自动驾驶、VR/AR等领域。本文致力于研究点云视觉任务中一个基础而关键的问题——构建点云序列之间点与点之间的对应关系,该问题在点云配准、三维重建、目标识别与跟踪、地图构建与定位等方面均有着广泛的应用,是目前研究领域关注和研究的热点。
二、动机

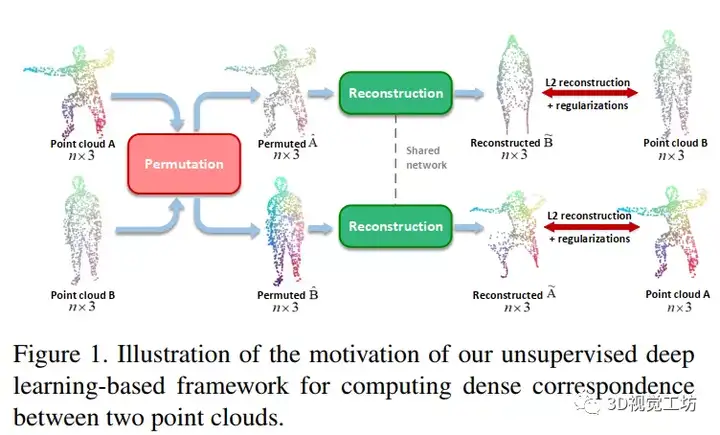 图 1 本文的动机示意图
图 1 本文的动机示意图三、网络结构

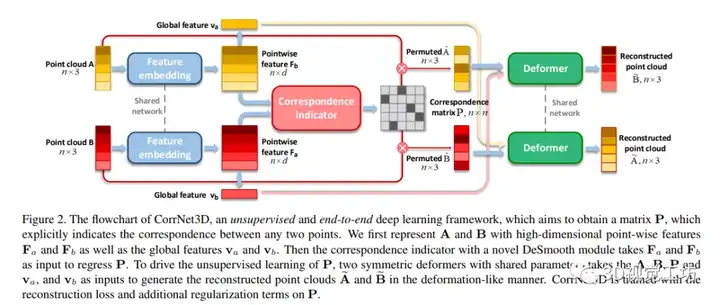 图 2 CorrNet3D网络结构图
图 2 CorrNet3D网络结构图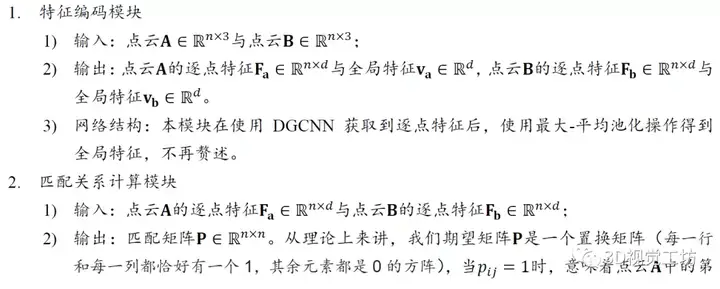
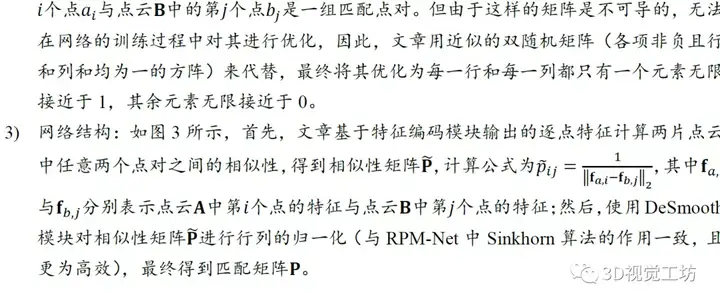
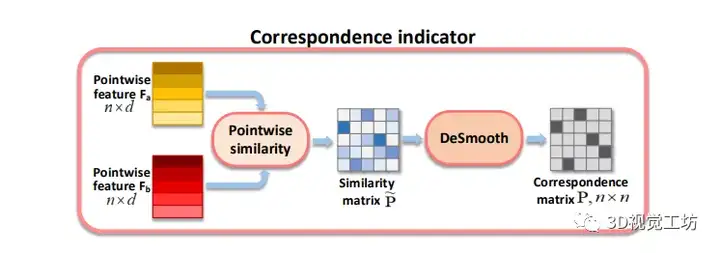 图 3 匹配关系计算流程示意图
图 3 匹配关系计算流程示意图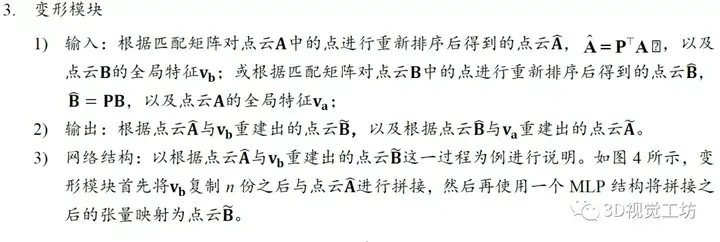 图 4 变形模块的网络结构
图 4 变形模块的网络结构四、实验结果
文章在真实的非刚性形变数据集与合成的刚性形变数据集上进行了实验,同时还针对刚性点云匹配关系的确定进行了实验,与DeepGFM、DCP与RPMNet进行了对比,详细实验设置请参照原论文。
下图中(a)、(d)展示了ground-truth的匹配关系,图(c)是DeepGFM的结果,图(b)是本文模型的结果。
下图展示了CorrNet3D在真实扫描数据集上的效果。
下图中(a)、(f)展示了ground-truth的匹配关系,(b)-(e)分别对应DCP、RPMNet、CorrNet3D以及S-CorrNet3D(有监督)的结果。
更多干货
欢迎加入【3D视觉工坊】交流群,方向涉及3D视觉、计算机视觉、深度学习、vSLAM、激光SLAM、立体视觉、自动驾驶、点云处理、三维重建、多视图几何、结构光、多传感器融合、VR/AR、学术交流、求职交流等。工坊致力于干货输出,为3D领域贡献自己的力量!欢迎大家一起交流成长~,也欢迎大家投稿,有稿费哦。
添加小助手微信:CV_LAB,备注学校/公司+姓名+研究方向即可加入工坊一起学习进步。
Recommend
-
16
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达3D视觉工坊的第58篇文章在上一篇文章
-
10
综述|2021最新关于点云配准的全面介绍 ...
-
13
CVPR2021|CenterPoint :基于点云数据的3D目标检测与跟踪 ...
-
19
CVPR2021|SpinNet:学习用于3D点云配准的通用表面描述符 ...
-
8
重磅直播 | CenterPoint:三维点云目标检测算法梳理及最新进展(CVPR2021) ...
-
10
CVPR2021 | PAConv:一种位置自适应卷积,点云分类、分割任务表现SOTA ...
-
10
PREDATOR: 低重叠三维点云的配准方法(CVPR2021) ...
-
15
RfD-Net:基于语义实例重构的点云场景理解(CVPR2021)论文标题:RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction论文地址:
-
2
CVPR2021| 基于自监督学习的多视图立体匹配3D视觉工坊专注SLAM、点云、三维重...
-
9
NDT点云配准算法原理及PCL实现
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK