

飞机的纵向增稳是如何实现的
source link: https://zhuanlan.zhihu.com/p/85109935
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
飞机的纵向增稳是如何实现的
一、什么是根轨迹
二、典型的二Y系统如何改变特性
三、飞机纵向运动是如何增稳的
四、F-16纵向增稳是如何实现的一、什么是根轨迹
我们知道,对于任何一个线性系统,给一个输入 都会有一个输出
,
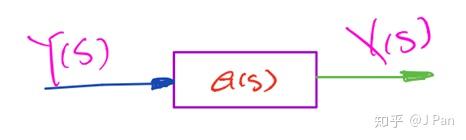
输出和输入的比值就是系统的开环传递函数。
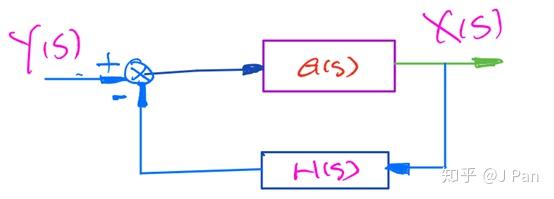
一个很显然的结论,当系统确定后,其输出输入关系也是确定的,倘若我们想改变这种关系,应该怎么办呢?——这其实就是经典控制理论解决的问题。最常用的方法就是采用负反馈,形式如下:
此时输入输出关系为:
当改变反馈的量或者增益时,输入输出关系也就发生改变,我们称此时传递函数为闭环传递函数。
最简单的反馈支路就是仅采用增益进行负反馈,即 ,
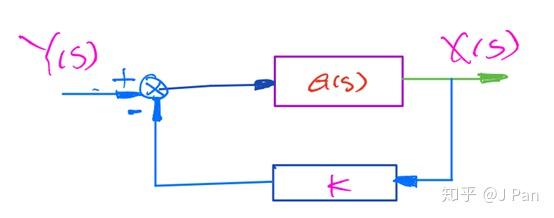
此时闭环传递函数变为:
我们知道,传递函数的极点决定了系统的模态,从而决定了系统的动态过程,接下来一个很重要的问题就来了:当 变化时,闭环系统的极点是如何变得呢?——这就是根轨迹法要解决的问题。
先将开环传递函数写成零点和极点的表达形式:
则闭环传递函数的表达形式为:
闭环传递函数的极点表达式为
当 时,
当 时,
也就是说,当负反馈增益 从
增加到
时,根轨迹以极点作为出发点,最终回到零点。下图是一个根轨迹的示意图:
这样我们就可以看出闭环系统的极点的位置来推断系统的闭环响应。根轨迹如何画不重要,我们可以借助MATLAB很容易画出来,重要的是根轨迹所呈现出来的信息。接下来我们就研究一下如何用根轨迹通过负反馈去改变一个二阶系统的特性。一阶系统比较简单,高阶系统往往可降阶到一阶和二阶,因此,了解二阶系统在工程上基本就够了。
二、典型的二阶系统如何改变特性
一个典型的二阶系统示意图如下:
主要有三个环节:弹性环节(力与位移成正比)、阻尼环节(力与速度成正比)以及惯性环节(力与加速度成正比)。
我们通常将二阶系统的传递函数写成如下形式:
其中 ,
分别为系统的质量、阻尼和刚度。
此时系统的极点为:
极点在 平面的分布如下:
其中在实轴的分量为 ,在虚轴的分量为
。可见,
,即无阻尼固有频率取决于极点离原点的距离,离得越远,频率越大。假定
与虚轴的夹角为
,则
,即
,可见根轨迹上的点与虚轴的夹角越大,阻尼比越大。
前面我们说了,可以通过状态反馈,改变系统的特性,对于二阶系统来说,我们有三个状态变量可以用来作为负反馈信号:位移、速度及角速度信号,我们分别来分析一下。
2.1当采用位移变量进行反馈时
此时,负反馈系统框图为:
简单的推导,可以得到系统闭环传递函数为:
则无阻尼固有频率为:
阻尼比为:
假设 ,
,则位移负反馈系统的根轨迹为:
可见,当采用位移负反馈时,无阻尼固有频率增加,但系统的阻尼比减小了,系统的阻尼特性下降,即稳定性降低了。
2.2 当采用速度变量进行反馈时
此时,负反馈系统框图为:
系统闭环传递函数为:
无阻尼固有频率为:
阻尼比为:
假设 ,
,则速度负反馈系统的根轨迹为:
可见此时无阻尼固有频率没有发生变化,但是阻尼比增加了,系统的稳定性增强。
2.3 当采用加速度变量进行反馈时
此时,负反馈系统框图为:
系统的闭环传递函数为:
无阻尼固有频率为:
阻尼比为:
假设 ,
,则加速度负反馈系统的根轨迹为:
可见,无阻尼固有频率和阻尼比都降低了,系统的稳定性也下降了。
当然,我们可以采用各个状态变量的组合进行负反馈,如下图所示,这样能更灵活的进行极点的配置。
三、飞机纵向运动是如何增稳的
早期的有人驾驶飞机的飞行控制,往往是由拉杆、摇臂或者刚说、滑轮等组成的机械传动机构,将驾驶员的操纵指令(驾驶杆和脚蹬)直接与飞机的气动舵面(升降舵、副翼、方向舵、襟翼等)相连接,并通过体力实现对飞机的控制。
然而,随着飞机性能的提高(例如飞行速度、飞行高度范围的扩大),飞机自然特性下降(动态特性的恶化与静安定性的降低),飞机气动参数的急剧变化以及对飞机使命要求的增加,对飞行控制也提出了更高的要求。最典型的要求即为增稳要求——通过飞行状态变量的负反馈,来改变飞机本身的特性,使之具有满足飞行品质的阻尼比和自然频率要求,示意图如下:
前面我们分析了如何采用系统的状态变量负反馈来改进系统的性能,接下来我们就以飞机的纵向运动为例,来分析一下。
对于飞机而言,其纵向运动常用的状态变量包括:俯仰角、俯仰角速率、飞行速度、迎角(攻角)以及法向加速度等。
我们逐一来分析一下:
3.1、采用俯仰角作为负反馈信号
我们以麦道公司A-4D Skyhawk (绰号:“天鹰”)为例,A-4D 是20世纪50年代初期美国道格拉斯公司研制的一型攻击机,最初被设计用来做为美国海军航空母舰的舰载机。该机于1954年首次飞行,曾在越南战争中扮演着关键的角色,亦参加过马岛战争、赎罪日战争,世界各地仍有数百架左右的A-4攻击机在服役。以下所有数据即分析均来源于该飞机,飞行状态为35,[email protected] Mach[1]。
俯仰角至升降舵之间的开环传递函数为:
当 从0增加到
时,其负反馈后的根轨迹如下图所示:
其中 表示开环传递函数极点,
表示开环传递函数零点。上图表示的是当系统采用负反馈时闭环系统的根轨迹。根据前面的分析,我们知道,轨迹上的点离原点的距离代表闭环系统的截止频率,也可以看成瞬态模态的运动频率,轨迹上的点与虚轴的夹角的代表阻尼比的正弦值,夹角越大,阻尼比越大。
显然,图中最左侧两点离原点较远,也就瞬态模态运动频高,对应的飞机的短周期运动模态。可见随着 的增加,短周期运动频率增加(轨迹上的点离原点原来越远),阻尼比降低(轨迹上的点与虚轴的夹角越来越小)。对于短周期运动的模态的特性而言,情况恶化了。
图中最右侧的哪两个点离原点较近,显然代表了长周期运动模态。我们来个放大图看的更清楚一点:
俯仰角作为负反馈时长周期运动根轨迹可以看出,对于长周期运动,采用采用俯仰角作为负反馈,其阻尼比是增加的,同时长周期运动模态的运动频率基本不发生变化(上图因为坐标系横纵坐标不是等值的,显示有一定变形)。对于长周期运动模态而言,情况变好了。这也很好理解,因为对于纵向运动而言,俯仰角变量主要是在长周期运动模态起作用,因此采用该变量作为负反馈,主要改善了长周期运动的特性。
对于飞行控制而言,短周期模态是我们更关心的,因此,一般不采用俯仰角负反馈来进行飞机的纵向增稳。
3.2、采用俯仰角速率进行负反馈
俯仰角速率是俯仰角的导数,其开环传递函数为:
当 从0增加到
时,其负反馈后的根轨迹如下图所示:
从图中可以明显的看出来,对于短周期运动,当采用俯仰角速率作为反馈时,其阻尼比是明显增加的,同时短周期运动的运动频率基本没有发生变化(上图因为坐标系的原因略有影响)。这也很好理解,因为短周期运动中,俯仰角速率是主导变量,因此采用俯仰角速率作为负反馈信号,短周期运动模态会更加敏感。总之,角速率负反馈可以较为明显的改善短周期运动的特性,因此在飞机的纵向增稳中大量使用,是标配选项。
我们再来看看对长周期运动的影响,同样放上发大图:
俯仰角速率作为负反馈时长周期运动根轨迹当 从0开始增加,长周期运动频率和阻尼比都会慢慢较小,当增加到一定程度直至
时,这是根轨迹会越过虚轴,这是长周期运动会走向不稳定,因此,
的选择要适当,不能太大。
3.3、采用速度进行负反馈
速度变量至升降舵偏角的开环传递函数为:
当 从0增加到
时,其负反馈后的根轨迹如下图所示:
可见当 取值较大时,短周期运动比阻尼比和运动频率都是变大,当
取值较小时,我们看不太清,放大看一下:
可见,此时短周期运动频率增加,阻尼比反而减小了。对于长周期运动而言,阻尼比和运动频率都是增加的。因为速度是长周期运动的主导变量,因此速度反馈对于长周期运动的增稳更有效。但是,由于飞机对速度反馈特别敏感,一般要求 非常非常小才行,因此实际飞机增稳中一般不使用。
3.4、采用迎角进行负反馈
迎角变量至升降舵偏角的开环传递函数为:
当 从0增加到
时,其负反馈后的根轨迹如下图所示:
当然,我们更关心小增益下系统的根轨迹情况,放大看一下:
迎角作为负反馈时短周期运动根轨迹可见,随着 增加,短周期运动频率快速增加,运动阻尼比缓慢减小。当然,当
大到一定程度后,阻尼比也会变得非常小。
我们再来看一下迎角负反馈对长周期运动的影响:
迎角作为负反馈时长周期运动根轨迹显然,当 增加时,长周期运动的阻尼比和频率都是降低的,当
增加到一定程度后,长周期运动会变得不稳定,因此
不宜选的过大。
直观的理解,迎角反馈的作用的是当迎角增大时,要增加升降舵的用舵量,从而让迎角有减小的趋势,这相当于是认为的增加了飞机的静稳定性,对于不稳定的飞机,作用的非常明显(后面我们会说F-16的例子)。因此,虽然迎角负反馈会使短周期运动频率增加,阻尼比也会有所减小,我们还是能够看到这种负反馈在静不稳定飞机的大量使用。
5、采用法向加速度进行负反馈
法向角速度至升降舵偏角的开环传递函数为:
当 从0增加到
时,其负反馈后的根轨迹如下图所示:
可见和迎角负反馈长得很像,我们从放大图来看一下细节:
法向加速度作为负反馈时短周期运动根轨迹和迎角负反馈类似,随着 增加,短周期运动频率快速增加,运动阻尼比缓慢减小。当然,当
大到一定程度后,阻尼比也会变得非常小。
当 增加时,长周期运动的阻尼比和频率都是降低的,当
增加到一定程度后,长周期运动会变得不稳定,因此
不宜选的过大。
可见,总的来说,法向加速度反馈和迎角反馈的作用是类似的。但是采集加速度信号所用的加速度计比采集迎角信号所用的迎角传感器要更稳定,精度更高,因此方向加速度反馈可以代替迎角反馈,或者作为迎角反馈的补充。
同时也要看到,法向加速度信号是由迎角信号、速度信号和俯仰角速率信号混合而成,因此法向加速度负反馈的效果就等同于这三者分别进行负反馈时效果的叠加。其中迎角相关项占主导作用,因此,加速度负反馈和迎角负反馈的行为有很大的类似。
四、F-16纵向增稳是如何实现的
F16是第一个采用电传控制系统的飞机,上世纪70年代中期首飞的,现在我们就看一下其纵向是怎么控制的[2]。
F16采用了三个状态变量进行反馈,分别是迎角 、俯仰角速率
以及法向过载
,其中
,与前面的所说的法向加速度时一回事。飞机在海平面高度以0.6Mach平飞时,三个状态变量对升降舵偏角的传递函数分别为:
极点有一个正实数,因此飞机是静不稳定的。控制框图示意图如下:
可见,内环采用的是迎角负反馈,主要是增加系统的静稳定性,外环采用的是法向过载和俯仰角速率负反馈,来增加阻尼特性。我们搭个simulink模型看一下:
增稳后的迎角阶跃响应(1°)为:
俯仰角速率响应(1°)为:
俯仰角响应(1°)为:
法向过载响应(1°)为:
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK