

利用向量运算解决圆线碰撞问题
source link: https://wuzhiwei.net/vector_circle_line_collide/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
日常生活中,你能看到各种各样的球类。
当球与平面发生碰撞时,球会改变其行进的轨迹,由于摩擦,也会改变行进的速度。
在2D游戏中,我们通常把球抽象为一个圆,把平面抽象为一条线。生活中的球和平面的碰撞,就简化成了圆和线的碰撞。
在本文,我们将看到怎么利用向量运算来解决一般的圆线碰撞问题,最后将会有一个DEMO来检验我们的成果。
不要害怕,一切东西都将很简单基础。你只需要保持好舒服的姿势,最好面前有一张纸和一根笔,然后端上一杯水(少喝点碳酸饮料),让我们开始吧~
向量及其运算
向量是一个同时具有大小和方向的几何对象。
字面上的定义总是那么的不容易理解,结合下图,一个以A为起点,B为终点的有向线段。它描述的就是向量→AB。
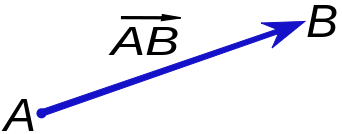
然而向量和有向线段是有区别的,因为有向线段还需要一个起点,而向量不需要,它只需要终点和起点的相对位移,即可以定义它的大小和方向。
我们可以定义向量→AB为:
有向线段实际是起点+向量,我们将有向线段的起点定义为p0,终点定义为p1。
我们可以将以上的有向线段定义为:
生活中墙可以简化为一条有向线段,球的移动轨迹也可以简化为一条有向线段。
即p0为球当前所在的位置,p1为下一时刻球应该在的位置,所以{vx, vy}就是球的速度向量。
向量之间可以像数字一样进行很多运算,运算规则比较简单,然而却能带来很大的便利性。下文将讲述向量的几个基本运算以及它们的意义和应用。
单位向量就是其长度为1的向量。
向量的长度其实就是两点距离的问题。
而由单位向量的定义,易知v的单位向量为:
单位向量就是是一个纯指向性质的向量,其便利在于不需要去额外计算它的长度,它的长度永远为1。
如果学过初中物理,你们应该对向量的加法不陌生。没错,向量加法就是用来求合力时的运算。 如图:
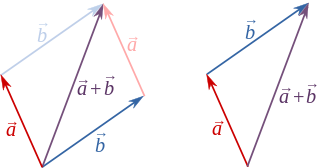
→c=→a+→b在程序中→c可以用如下方式表达:
向量加法的意义在于:有多个向量作用于同一点时,可以通过其来计算出所有向量作用下合成的一个向量,将多个向量简化为一个向量。
点积是向量间的乘积,其结果是一个标量(纯数字,不带方向信息)。其定义为:
→A⋅→B=|→A| |→B| cosθ,其中θ为→A和→B的夹角。
求解点积的代码为:dp = A.vx*B.vx + A.vy*B.vy
由cos函数的性质,可以知道如果夹角为90度,则点积为0;夹角超过90度,则点积小于0;夹角小于90度,则点积大于0。
其意义为可以快速的判断两向量指向的方向是不是相近。若点积大于0,则相近,小于0,则相反。
向量→A在→B上的投影向量就是:
一个向量长度为→A在→B方向上投影长度,向量方向为→B方向的向量。
其实,你只需要参照点积的图,看到|→A| cosθ,就是→A在→B上的投影长度。
投影长度乘→B的单位向量,则为向量→A在→B上的投影向量。
所以→A在→B上投影向量为(|→A|cosθ) →DB,其中→DB为→B的单位向量。
我们可以利用点积来简化运算,→A⋅→DB=|→A| |→DB| cosθ,由于→DB为单位向量,所以(|→A|cosθ) →DB=(→A⋅→DB)∗→DB 代码如下:
叉乘也是向量间的乘积,但是其结果仍然是一个向量。
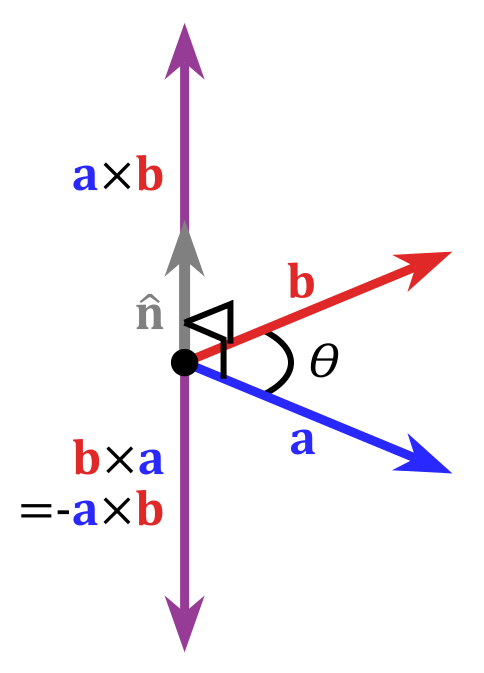
叉乘的一个重要便利在于:它能用来判断点在向量的哪边。若点在向量的左边,则夹角小于180度;若点在向量的右边,则夹角大于180度。
以下是利用叉乘(矩阵运算),来获知点c是否在有向线段ab的左侧。
注意:在以上代码中判断的是<0,是因为本文中DEMO使用的坐标系的Y轴朝向是朝下递增,如果是正常的坐标系朝向,即Y轴朝上递增,应该判断的是>0。
法向量是与向量方向垂直的向量。对于每条向量它都有左右两条法向量。想象你的眼睛和屏幕构成了一个向量,如果你坐姿正确的话,张开你的双手,你左手就是左法向量,右手就是右法向量。
因为法向量与原向量垂直,所以其点积为0,fx*vx + fy*vy = 0,最简单的解为{fx:-vy, fy:vx}和{fx:vy, fy:-vx}。
若点在向量左边,则叉乘小于0,则vx∗fy–vy∗fx<0。
由上易知左法向量为:{fx:vy, fy:-vx},右法向量为:{fx:-vy, fy:vx}。
一般来说,我们更希望用单位向量来表示法向量。
所以我们可以将v的右法向量表示为:
同理,左法向量表示为:
在游戏引擎中都有一个每帧循环,循环在每一帧调用一次来更新游戏逻辑。
对于圆的行进更新,很自然会想到每帧将圆的位置从p0更新到p1。
但是这么做是不准确的,因为程序的帧率不会恒定,也就意味着每帧的间隔时间是不一样的。
举个栗子:假设你的引擎设定的FPS是50,即每秒有50帧,每帧你想移动的距离是1px,这样球每秒将会移动50px。但是由于还有其他的运算和渲染,引擎的FPS只能达到40,这样球每秒只能移动40px,跟你的预期完全不一样。
如果球在规定时间内的位置和你的预期不符,那样会导致很多的问题。
解决办法是利用每帧的间隔时间乘与移动速率来得到下一帧的位置。
当圆在行进过程中,我们必须判断圆是否与线段发生碰撞。而确定碰撞的方式也很直观,就是确定圆心与线段的距离是否小于圆的半径。
而且发生碰撞之后,我们需要将圆的位置回移到其恰好与线相交的那点。
任意移动线段的两点,若圆线相交,则圆变为半透明,绿色的线段为圆需要回移的有向线段。
注意,当圆碰撞到线段的两端时,其回弹向量的大小为圆与线段端点的距离;否则为圆与线段的距离。
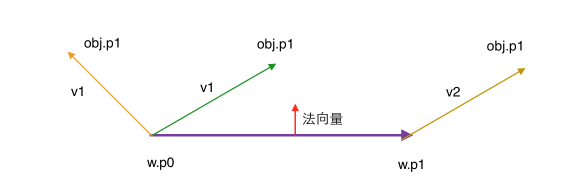
第一步,我们设圆的位置为obj.p1,墙为有向线段w。
我们将墙的起点w.p0和obj.p1的向量称为v1向量,将墙的终点w.p1和obj.p1的向量称为v2向量。
第二步,若v1与w的点积小于0(夹角大于90度,最左侧情况),或v2与w的点积大于0(夹角小于90度,最右侧情况),则可知圆碰撞到了线段的两端。返回的碰撞向量为v1或v2。
若前两种情况都不符合,则圆碰撞到了线段内。这时,我们只需要返回v1在w的法向量上的投影向量即可。
第三步,若返回的向量的长度小于圆的半径,则说明发生了碰撞。
代码如下:
由上图可以清晰的知道,回弹向量沿墙壁v2的投影向量与v1沿墙壁v2的投影向量一致,而回弹向量沿墙壁法向量v2n的投影向量与v1的刚好相反。
所以,我们只需要求出v1的以上两个投影向量,即可得到反弹的向量。
代码如下:
拖拽红色圆球,然后释放给与其方向,即可测试。
有关代码托管于Github:
以上方法的问题在于:若圆球的速度过快,则会下一帧判断的时候,直接穿越了墙壁,而没有检测到碰撞。
这个问题有两种解决方案:一种是预测圆线的碰撞,并进行相应的处理;还有一种是对每帧的时间进行切片,如果时间切片足够小的话,则在一个时间切片内圆的移动不会超过其直径,则避免了穿越墙壁的情况。
下面是时间切片方案的伪代码:
P.S. 推荐一个可以直观理解线性代数的视频集合,非常nice:http://space.bilibili.com/88461692/#!/channel/detail?cid=9450。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK