

探索AMX: 解锁Apple Silicon隐藏性能
source link: https://zhen8838.github.io/2024/04/23/mac-amx/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
探索AMX: 解锁Apple Silicon隐藏性能
自从2020年Apple发布的芯片M1/M2/M3, 至少提供了四种不同的方式可以执行高负载的计算任务: 1. 标准的ARMv8 SIMD/NEON向量指令集. 2. 苹果尚未公开文档的AMX(Apple Matrix Co-processor)指令集, 由CPU发射, 在特殊的加速器上运行. 3. 神经网络处理器ANE(Apple Neural Engine) 4. Metal GPU
在M1 Max上计算单精度浮点矩阵乘法时, 使用SIMD指令集可达到102 GFLOPS左右的性能, 而使用AMX指令集最多可达到1475 GFLOPS! 本文就来带领大家一同探索AMX指令集, 学习如何解锁这剩下的14倍算力.
先通过一张图建立起对于AMX初步了解. 考虑一个32x32的计算单元网格, 每个单元可以执行16位乘积, 或者2x2单元子网格可以执行32位乘积, 或者4x4子网格可以执行64位乘积. 为了提供此网格的输入, 有一个包含32个16位元素(或16个32位元素, 或8个64位元素)的X寄存器池, 以及一个同样包含32个16位元素(或16个32位元素, 或8个64位元素)的Y寄存器池. 使用单个指令可以执行完整的外积: 将X寄存器的每个元素与Y寄存器的每个元素相乘, 并在相应位置与Z元素一起累加. 或者可以将X寄存器的每个元素与Y寄存器的每个元素进行内积, 得到一个点的结果.
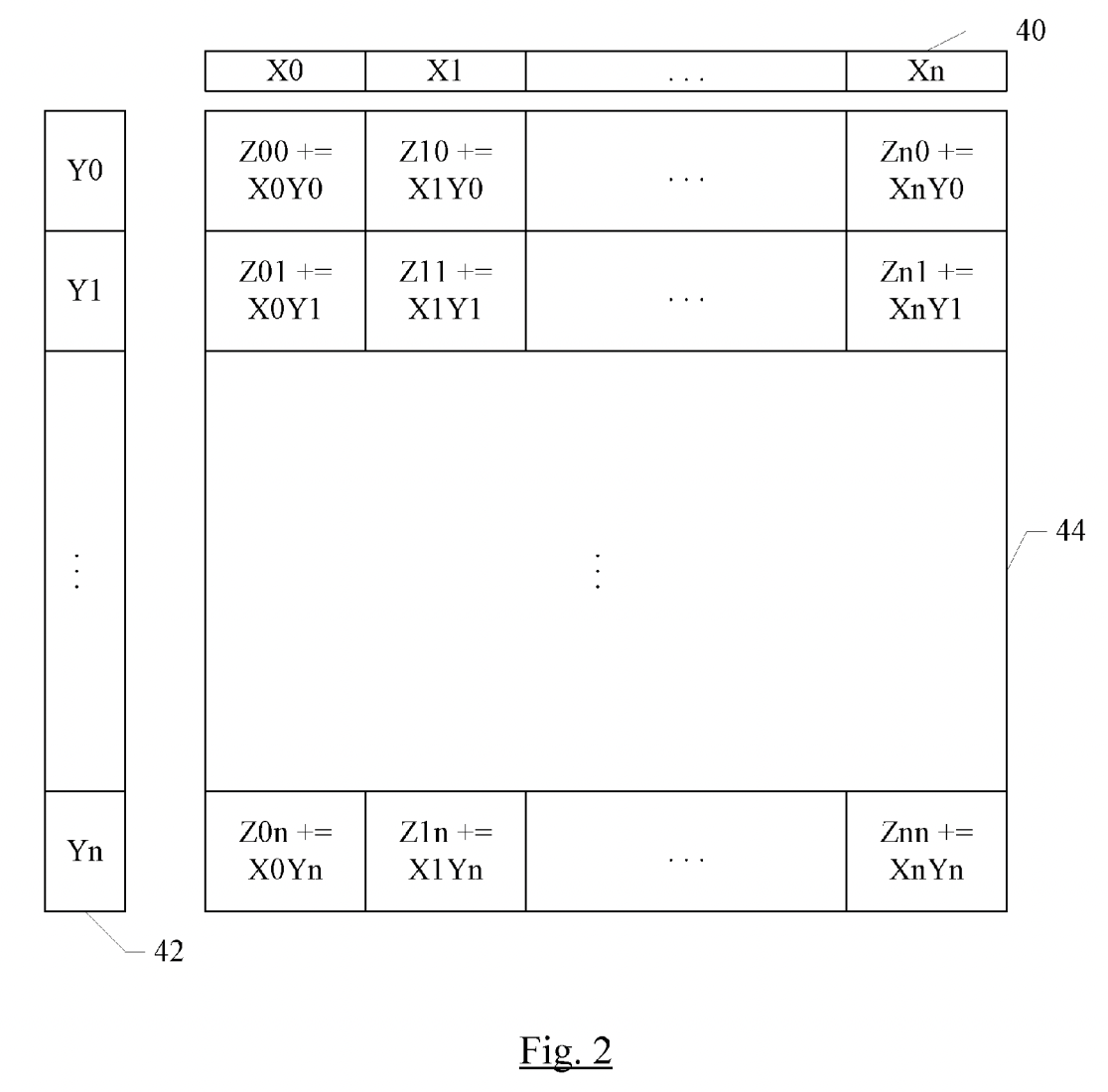
专利 US20180074824A1 专利 US20180074824A1
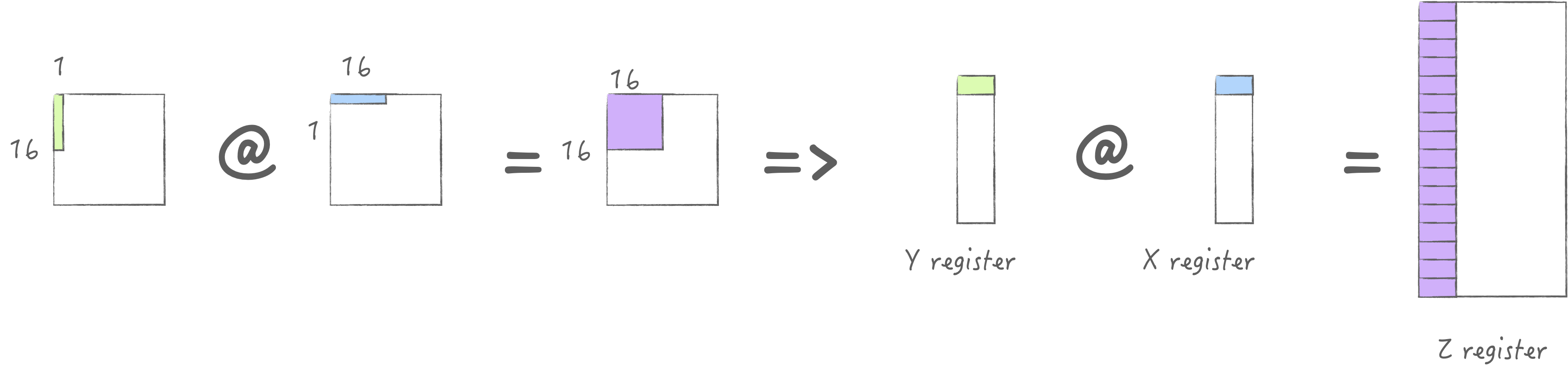
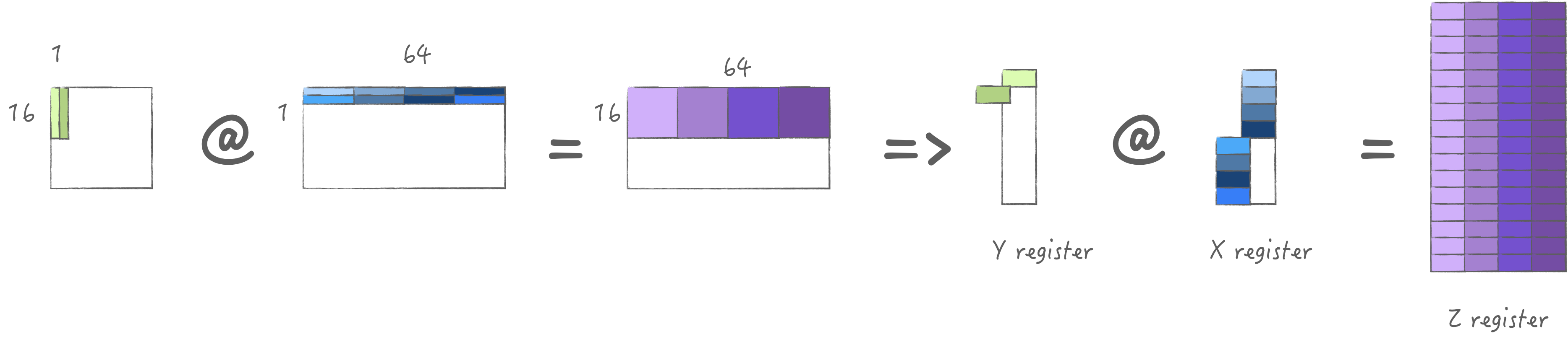
AMX为以上的操作提供了LDX/LDY, FMA, LDZ/SDZ等指令. 其中FMA分为Matrix Mode和Vector Mode分别对应外积与内积两种不同的计算方式. 当然我们首选外积, 否则无法最大化利用硬件. 下面两张图分别展示了内积与外积的计算方式:
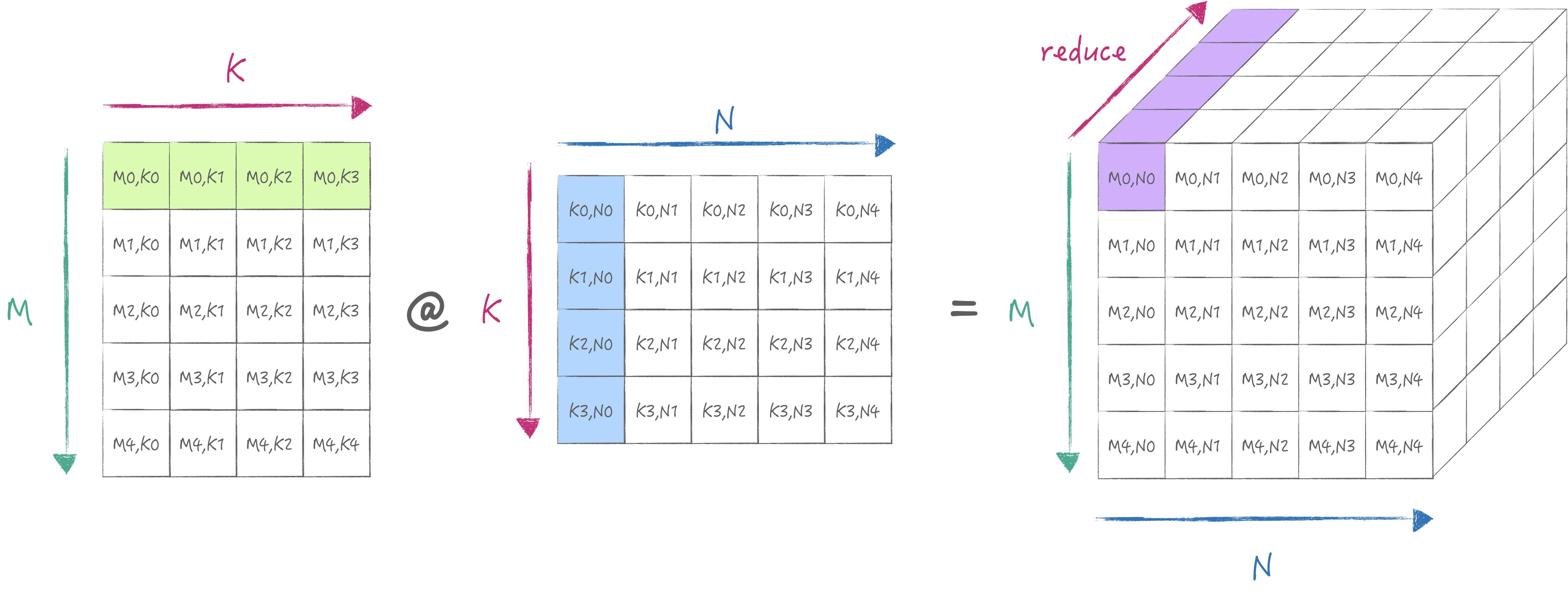
外积 外积
2. 最小计算流程
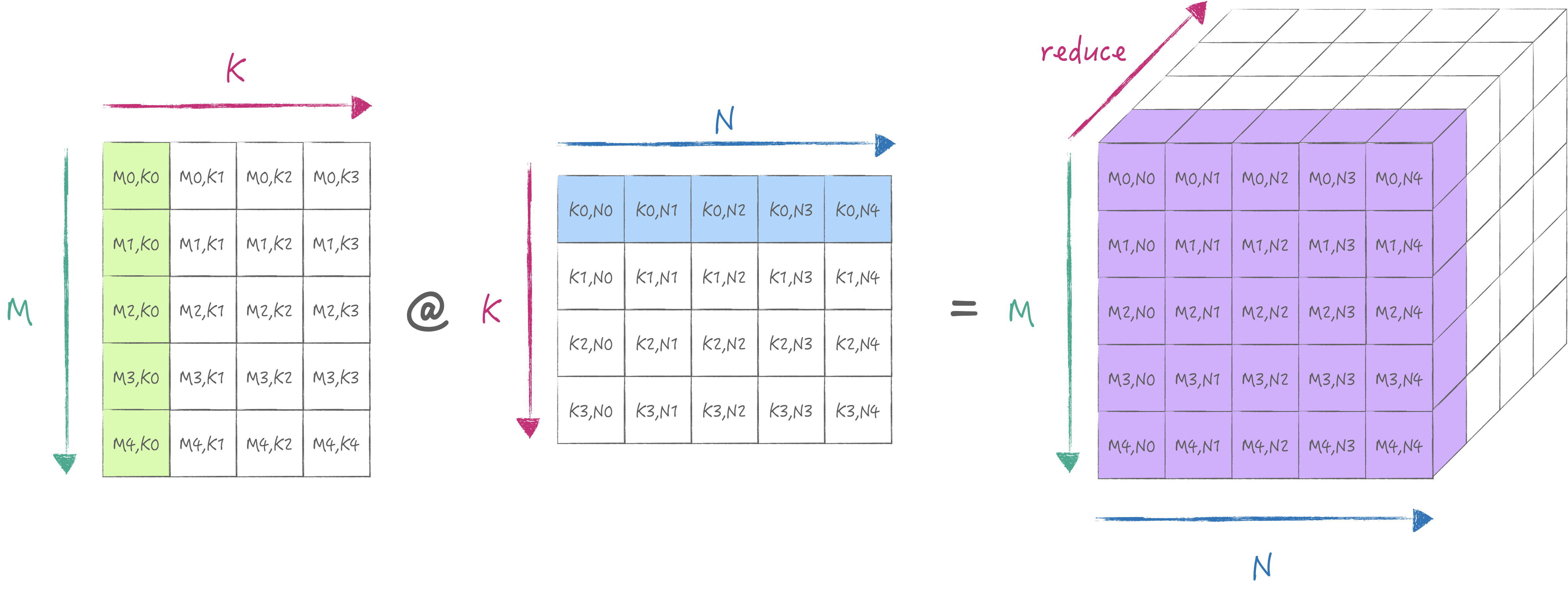
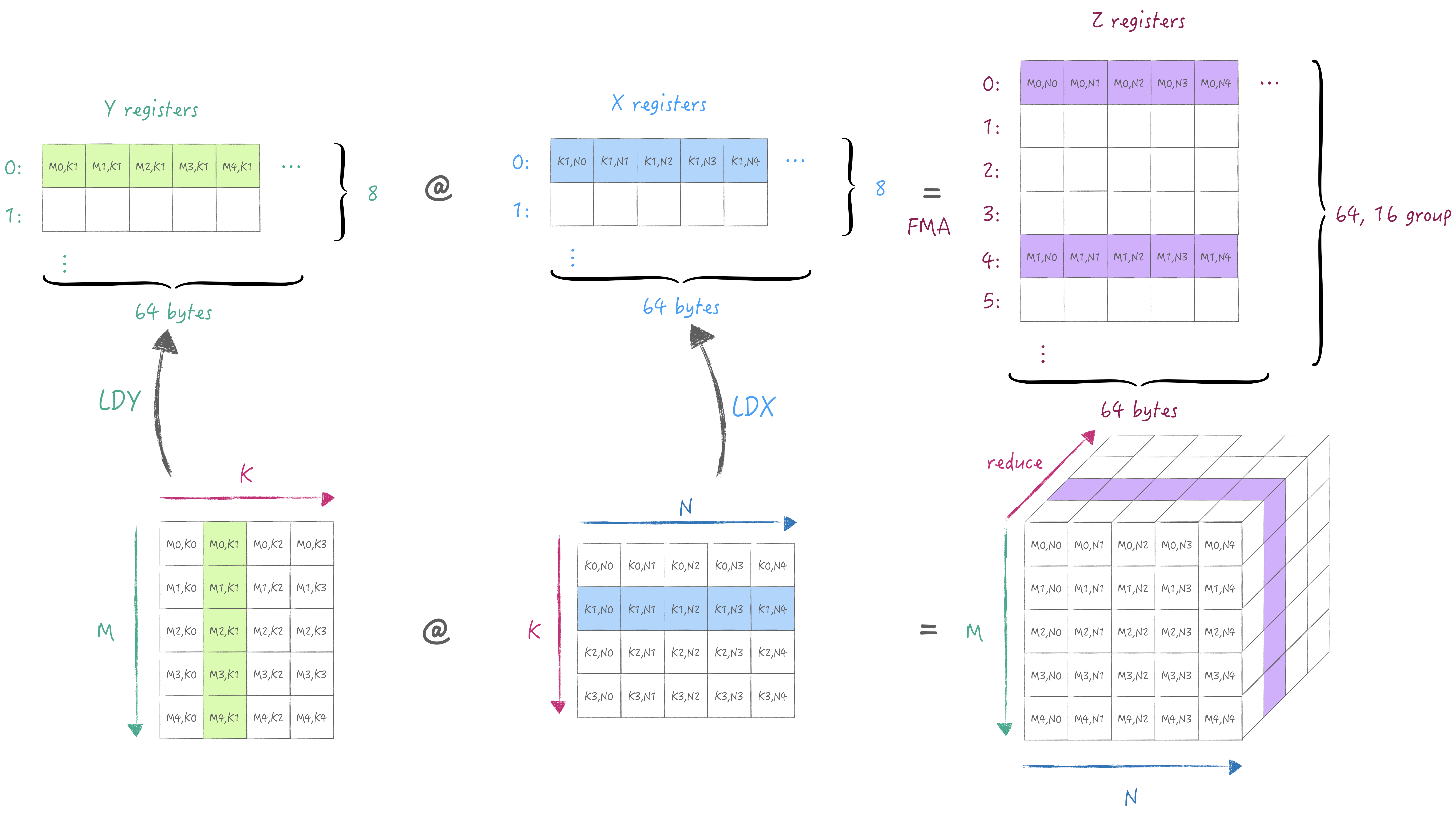
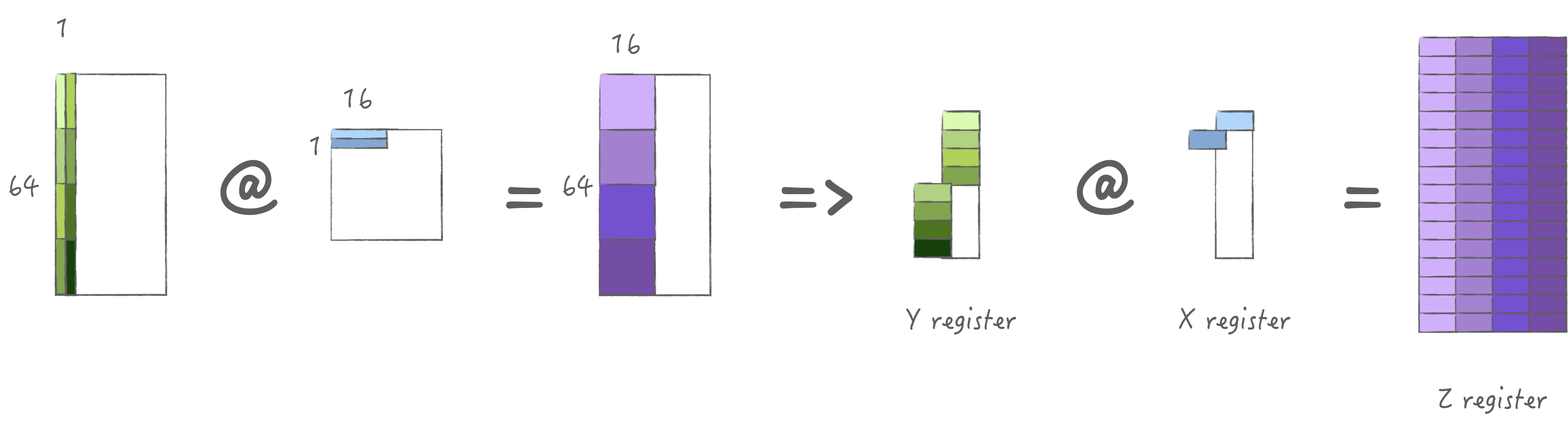
下面同样通过一张图解释清楚AMX中的寄存器规格与最小计算流程. 首先是X/Y寄存器池, 他们各有8个宽度为64 bytes的寄存器, 可以存储fp16/32/64或者i8/16/32,u8/16/32类型的数据. 接着是Z寄存器池, 他有64个宽度为64 bytes的寄存器, 用于存储X/Y寄存器外积或内积的结果. 根据第一节中描述, 2x2单元子网格来执行32位乘积, 因此执行外积时需要用到16个寄存器, 因此64个寄存器被分16组, 每组的间隔为4(64/16), 即外积结果并非是按寄存器连续存储的. (注意AMX只支持从主存中加载与存储, 无法通过通用寄存器/向量寄存器加载与存储)
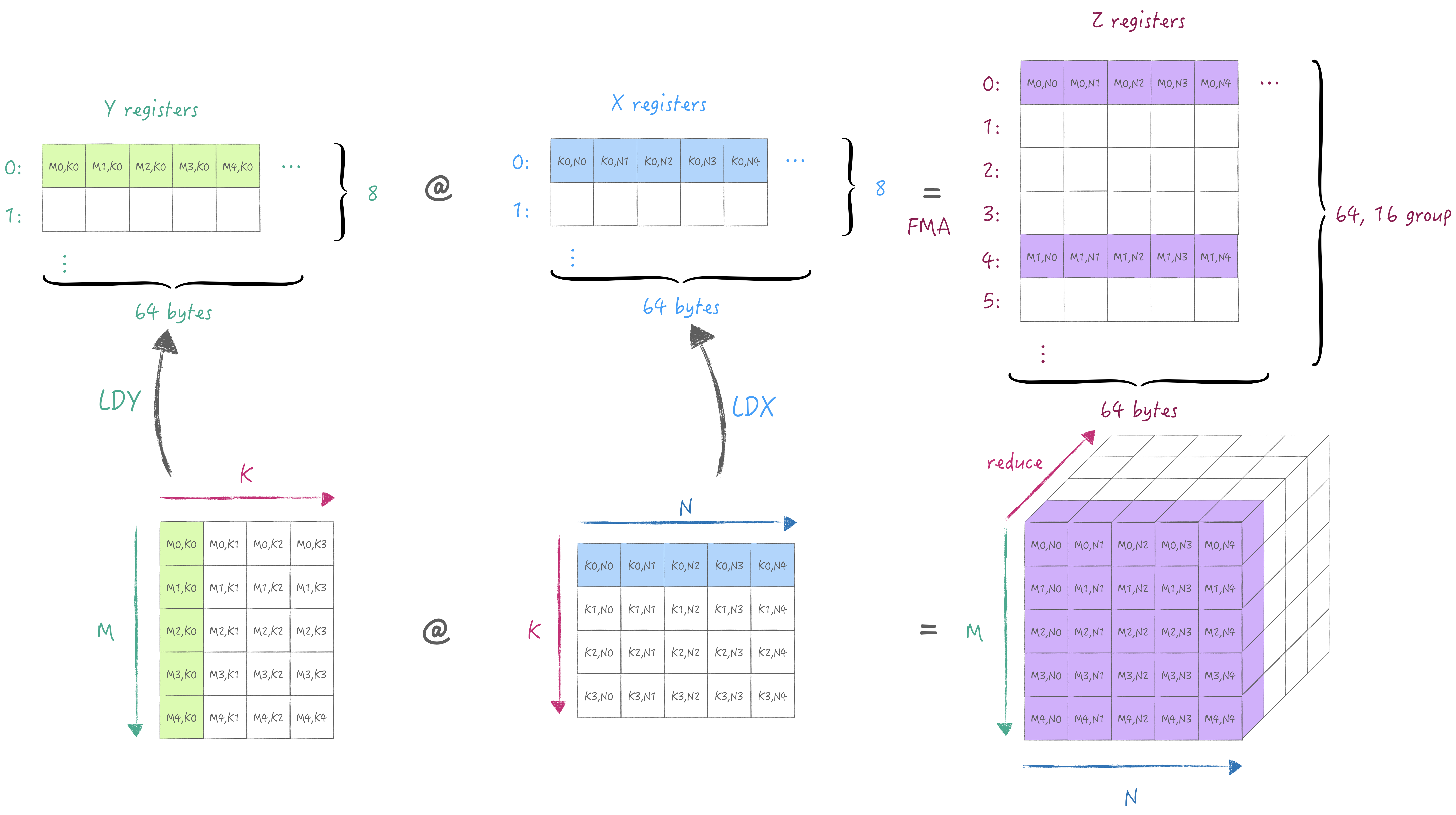
最小计算流程 最小计算流程
通过外积计算可以获得一个partial sum存储在Z寄存器池中, 接下来我们可以切换K维度从而累积partial sum得到完整的结果:
切换K维度 切换K维度
此时重新加载不同K维度的A/B矩阵, 然后将计算结果写入到与之前同一个Z的寄存器组中实现累加.
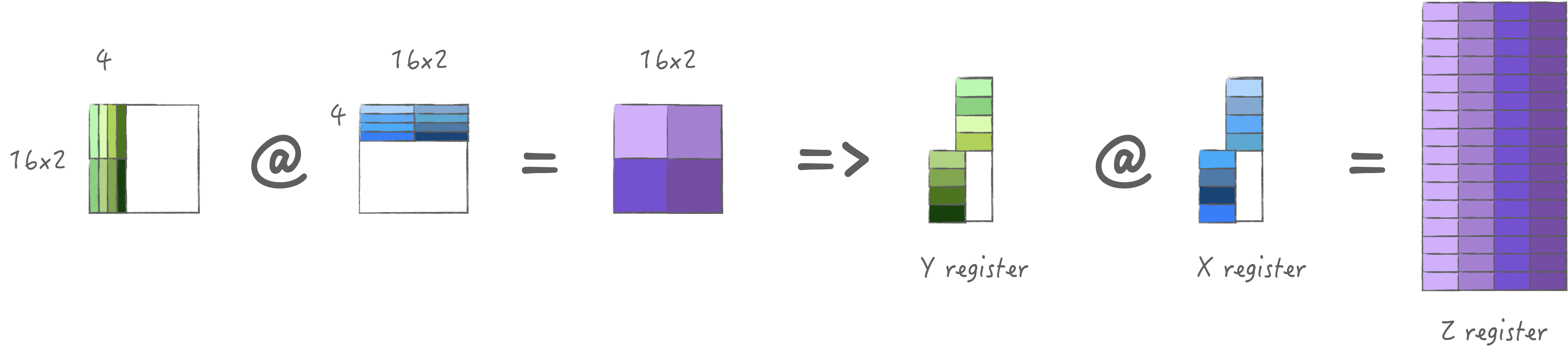
当然也可以迭代M/N, 比如这个例子中保持M不变, 迭代到下一个N, 此时我们需要在Z寄存器池中另外选一组存储当前M/N的累加值:
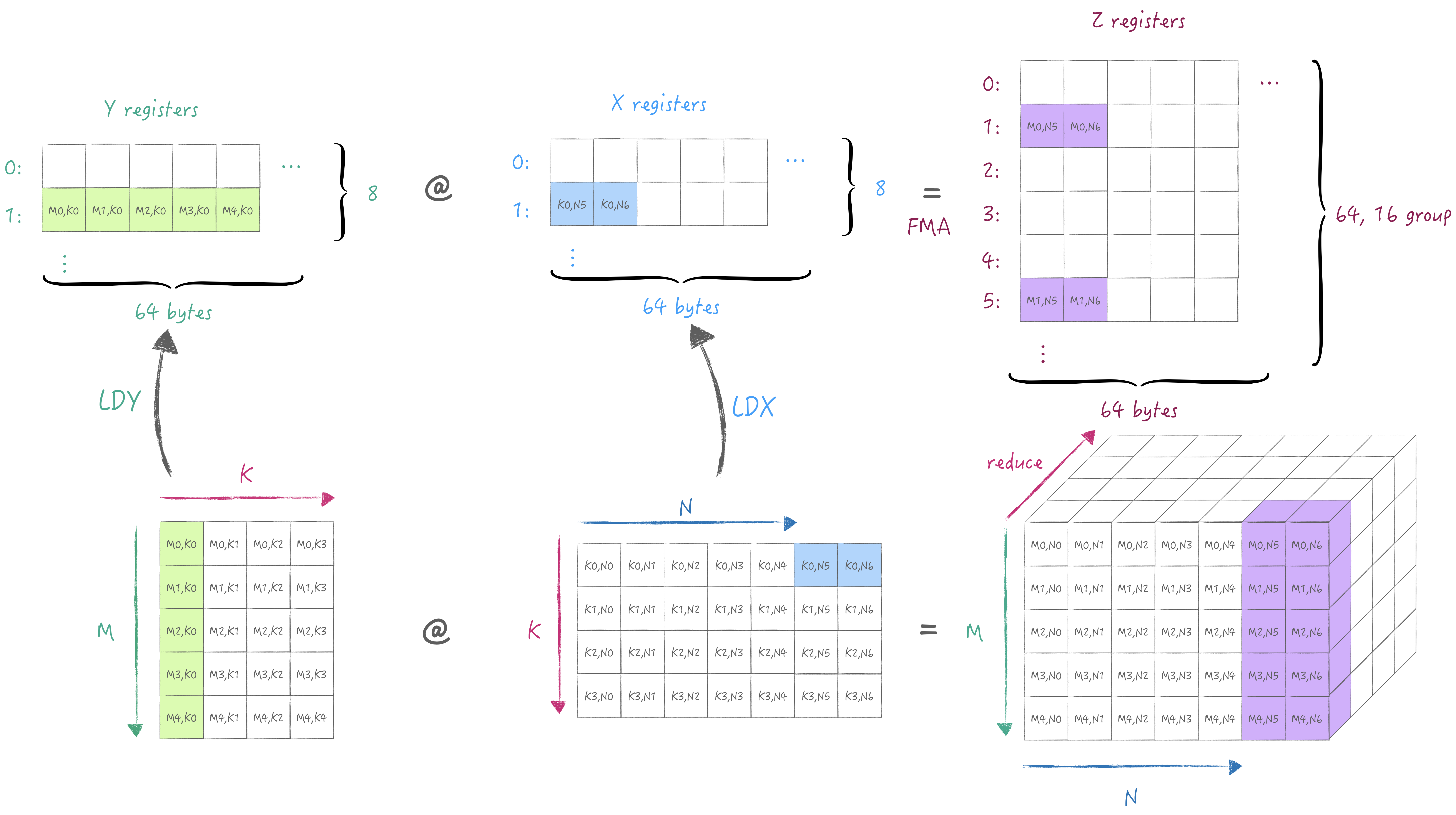
切换K维度
3. 理论性能测试
为了用好AMX, 首先需要更加了解AMX的相关参数, 接下来一起验证理论各项性能指标.
3.1 理论计算性能
根据上一节我们清楚了Z寄存器组在float32模式下一共被分为了16组, 一次计算在每一组中得到一列结果, 因此ALU实际上被分为了4组. 这里就来验证使用不同个数的ALU组的峰值性能:
perf_func = [&z_nums]() {
constexpr uint64_t a = matfp().dtype_mode(matfp_dtype_t::f32f32).z_row(0);
constexpr uint64_t b = matfp().dtype_mode(matfp_dtype_t::f32f32).z_row(1);
constexpr uint64_t c = matfp().dtype_mode(matfp_dtype_t::f32f32).z_row(2);
constexpr uint64_t d = matfp().dtype_mode(matfp_dtype_t::f32f32).z_row(3);
AMX_MATFP(a);
if (z_nums > 1)
AMX_MATFP(b);
if (z_nums > 2)
AMX_MATFP(c);
if (z_nums > 3)
AMX_MATFP(d);
};
得到结果如下:
| ALU Nums | Gflop/s |
|---|---|
| 1 | 405.530 |
| 2 | 826.912 |
| 3 | 1244.570 |
| 4 | 1666.952 |
这表明虽然每组ALU是单独配置和发射, 但是他们之间是可以并行执行的.
3.2 理论数据加载性能
这里是我设计的性能测试用例, 其中reg nums表示X/Y寄存器池.
near表示是否读取内存中连续的地址,在M2 Pro中l1 Dcache
大小为65536, 因此将K设计为数倍大于l1 cache size,
当near == 0时需要跨过两倍大小的cache size去读取.
width表示一次读取几个寄存器个数, 最大为4.
constexpr size_t K = (65536 / 4 / (16 * 4)) * 4;
float M[K * 2][16 * 4]{};
float N[K * 2][16 * 4]{};
perf_func = [&M, &N, &near, ®_num, &x_width, &y_width]() {
auto ldx = ldxy().register_index(0);
auto ldy = ldxy().register_index(0);
if (x_width >= 2)
ldx = ldx.multiple();
if (x_width >= 4)
ldx = ldx.multiple_four();
if (reg_num > 1) {
if (y_width >= 2)
ldy = ldy.multiple();
if (y_width >= 4)
ldy = ldy.multiple_four();
}
if (near) {
for (size_t i = 0; i < K; i++) {
AMX_LDX(ldx.bind(M[i]));
if (reg_num > 1) {
AMX_LDY(ldy.bind(N[i]));
}
}
} else {
for (size_t i = 0; i < K / 2; i++) {
for (size_t j = 0; j < 2; j++) {
AMX_LDX(ldx.bind(M[j * K + i]));
if (reg_num > 1) {
AMX_LDY(ldy.bind(N[j * K + i]));
}
}
}
}
};
接下来我们计算数据加载时间, 得到下表:
| Reg Nums | Near | X Width | Y Width | GB/s |
|---|---|---|---|---|
| 1 | 1 | 1 | 0 | 87.1489 |
| 1 | 1 | 2 | 0 | 213.164 |
| 1 | 1 | 4 | 0 | 456.332 |
| 1 | 0 | 1 | 0 | 120.796 |
| 1 | 0 | 2 | 0 | 260.115 |
| 1 | 0 | 4 | 0 | 483.285 |
| 2 | 1 | 1 | 1 | 134.33 |
| 2 | 1 | 1 | 2 | 162.084 |
| 2 | 1 | 1 | 4 | 297.15 |
| 2 | 1 | 2 | 1 | 201.658 |
| 2 | 1 | 2 | 2 | 214.772 |
| 2 | 1 | 2 | 4 | 350.554 |
| 2 | 1 | 4 | 1 | 384.614 |
| 2 | 1 | 4 | 2 | 349.528 |
| 2 | 1 | 4 | 4 | 476.722 |
| 2 | 0 | 1 | 1 | 130.604 |
| 2 | 0 | 1 | 2 | 163.91 |
| 2 | 0 | 1 | 4 | 254.922 |
| 2 | 0 | 2 | 1 | 195.612 |
| 2 | 0 | 2 | 2 | 213.61 |
| 2 | 0 | 2 | 4 | 298.603 |
| 2 | 0 | 4 | 1 | 310.308 |
| 2 | 0 | 4 | 2 | 302.767 |
| 2 | 0 | 4 | 4 | 325.193 |
可以发现加大读取宽度是可以翻倍带宽的, 因此这是无成本的. 读取连续摆放的数据相比于非连续读取略有提升, 这表明需要对数据摆放进行优化. 同时加载两个寄存器中也同样不会导致带宽降低, 表明可以同时加载A/B矩阵, 但需要注意尽量cache起来.
3.3 理论数据存储性能
同样在store时设计了reg_num,near,width等选项,
值的注意的是, 因为Z寄存器池被分为了16组,
所以每一次store时都将16组全部输出:
constexpr size_t K = (65536 / 4 / (16 * 4)) * 2;
float CNear[16][16 * 4]{};
float C[16][K]{};
perf_func = [&C, &CNear, &near, &z_num, &width]() {
auto ldst = width == 2 ? ldstz().multiple() : ldstz();
for (size_t z = 0; z < z_num; z++) {
for (size_t m = 0; m < 16; m++) {
AMX_STZ(ldst.row_index(m * 4 + z * width)
.bind(near ? CNear[m] + 16 * z * width
: C[m] + 16 * z * width));
}
}
};
测试结果如下:
| Reg Nums | Near | Width | GB/s |
|---|---|---|---|
| 1 | 1 | 1 | 10.3769 |
| 1 | 1 | 2 | 8.93052 |
| 1 | 0 | 1 | 12.9423 |
| 1 | 0 | 2 | 12.3377 |
| 2 | 1 | 1 | 5.69731 |
| 2 | 1 | 2 | 12.3658 |
| 2 | 0 | 1 | 7.55092 |
| 2 | 0 | 2 | 13.0133 |
| 3 | 1 | 1 | 6.58085 |
| 3 | 0 | 1 | 11.4118 |
| 4 | 1 | 1 | 8.8847 |
| 4 | 0 | 1 | 9.85956 |
可以发现使用多个寄存器并无法提升带宽, 说明基本上是串行输出, 但开启两倍宽度还是可以有效提升带宽. 然而整体速度相比于计算和加载慢了数倍, 这表明我们不能频繁地加载与存储Z.
3. 设计Micro Kernel
基于上一节中的内容, 我们可以来尝试编写一个现实世界的矩阵乘法, 为了矩阵乘法的高效, 采用自底向上的准则来设计它. 也就是说, 首先需要设计一个充分利用硬件算力的micro kernel, 接着再通过合理调用micro kernel达到极限算力.
首先回顾一下最基础的计算流程, 加载一列M, 加载一行N, 计算得到一块MxN. 此时明显可以发现对于X/Y/Z寄存器池都是没用充分利用的, 特别是Z寄存器池, 这意味着只使用了1414的算力, 所以首要目标是用满它.
根据上一节, 我们可以已知最大理论计算性能以及带宽, 那么根据公式我们可以计算用满ALU时一次计算需要花费多少纳秒: ComputeTime=FLOPsGFLOPS NanoSecondsLoadTime=BytesGBS NanoSecondsComputeTime=FLOPsGFLOPSNanoSecondsLoadTime=BytesGBSNanoSeconds
接下来我们基于这个数据来设计不同的计算策略:
3.1 计算策略1: 加载多组N
在我的M2 Pro中, AMX最大一次可以加载4*64 bytes,
因此可以加载1组M以及4组的N, 利用满计算单元得到M*4N,
然后在下一次循环中切换不同的K. 总的来说是加载一次, 计算四次,
由于X寄存器池大小限制只能多缓存一次.
查表可知,加载带宽为254.922 GB/s,得到计算时间与数据加载时间分别为: FLOPs=2∗M∗N∗4=2048ComputeTime=FLOPs/1666=1.229 NanoSecondsBytes=(1∗M+4∗N)∗4LoadTime=Bytes/297.15=1.076 NanoSecondsFLOPs=2∗M∗N∗4=2048ComputeTime=FLOPs/1666=1.229NanoSecondsBytes=(1∗M+4∗N)∗4LoadTime=Bytes/297.15=1.076NanoSeconds
两者时间基本差不多, 但他们之间的差只有0.15ns,
这点时间不足以在一次缓存中流水起来.
3.2 计算策略2: 加载多组M
同上一种策略类似, 同样也是加载一次计算四次, 计算时间与加载时间和上一小节类似, 但是这里存在一个额外问题则是对于A矩阵的列方向是不连续的, 需要先通过CPU进行转置4倍的M后才可以加载, 因此不考虑.
3.3 计算策略3: 加载两组M/N
为了均匀X/Y寄存器的存储, 可以考虑加载同样大小的M/N, 也就是加载2组,
此时可以计算4次得到2M*2N大小的输出,
考虑到最大可以加载4*64 bytes, 那么可以加载不同K两组M/N,
这样一次加载实际可以计算8次, 最大限度的利用算力.
此时对于X/Y寄存器池使用量是一样的, 也就是他们还可以多缓存一次:
来动手计算一下,加载带宽为254.922 GB/s,得到计算时间与数据加载时间分别为: FLOPs=2∗M∗N∗4∗2=4096ComputeTime=FLOPs/1666=2.458 NanoSecondsBytes=(4∗M+4∗N)∗4LoadTime=Bytes/476.722=1.074 NanoSecondsFLOPs=2∗M∗N∗4∗2=4096ComputeTime=FLOPs/1666=2.458NanoSecondsBytes=(4∗M+4∗N)∗4LoadTime=Bytes/476.722=1.074NanoSeconds
此时计算时间减去数据加载时间为1.384 ns,
大于下一次的计算时间1.074 ns,
那么也就表明我们可以在下一次缓存中完美的流水起来,
从而发挥出极限算力.
3.4 验证计算策略3
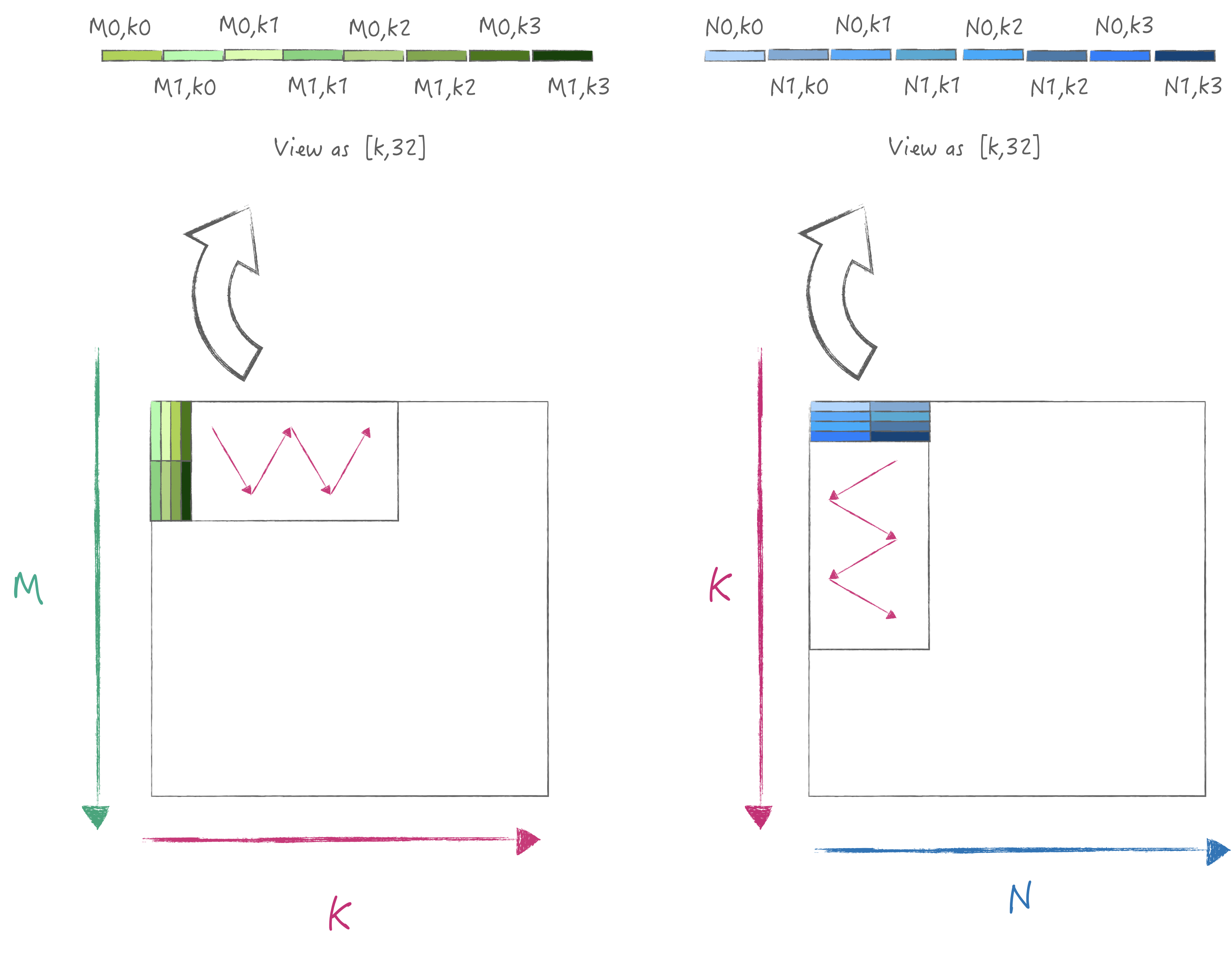
为了达到峰值的数据加载性能, 我们需要对矩阵进行布局优化,
也就是将A/B矩阵分别以32为宽度进行pack, 这样加载时是满足内存连续读取,
同时一次可以计算得到2*M*N的结果, 其具体迭代流程图如下:
为了简单起见我假设M/K/N都满足最小计算单元的倍数, 同时要求输入A/B矩阵都是经过布局优化的, 下面则是具体的代码:
template <bool LoadC, bool StoreC, size_t KTile, size_t M, size_t N>
void gepdot(size_t curM, size_t curK, size_t curN,
const float packedA[KTile][32], const float packedB[KTile][32],
float C[M][N]) {
static_assert(KTile % 4 == 0, "not support k%4!=0");
if constexpr (LoadC) {
// load acc value.
for (size_t om = 0; om < 2; om++) {
for (size_t m = 0; m < 16; m++) {
AMX_STZ(
ldstz().row_index(m * 4 + om * 2).multiple().bind(C[om * 16 + m]));
}
}
}
for (size_t k = curK; k < curK + KTile; k += 4) {
for (size_t ok = k; ok < k + 4; ok += 2) {
// load [m0,k0], [m1,k0], [m0,k1], [m1,k1]
AMX_LDY(ldxy().register_index(0).multiple().multiple_four().bind(
(void *)packedA[ok]));
// load [n0,k0], [n1,k0], [n0,k1], [n1,k1]
AMX_LDX(ldxy().register_index(0).multiple().multiple_four().bind(
(void *)packedB[ok]));
// compute 8 times.
// [[m0,n0],[m0,n1],
// [m1,n0],[m1,n1]]
for (size_t ik = ok; ik < ok + 2; ik++) {
auto fma = ik == 0 ? fma32().skip_z() : fma32();
for (size_t m = 0; m < 2; m++) {
for (size_t n = 0; n < 2; n++) {
AMX_FMA32(fma.z_row(m * 2 + n)
.y_offset((ik - ok) * 2 * 16 * 4 + m * 16 * 4)
.x_offset((ik - ok) * 2 * 16 * 4 + n * 16 * 4));
}
}
}
}
}
// last time need store C.
if constexpr (StoreC) {
for (size_t om = 0; om < 2; om++) {
for (size_t m = 0; m < 16; m++) {
AMX_STZ(
ldstz().row_index(m * 4 + om * 2).multiple().bind(C[om * 16 + m]));
}
}
}
}
在M = 16 * 2, K = 8192, N = 16 * 2的情况下测试,
得到1632.13 Gflop/s的性能,
达到了峰值性能的0.979%.:
[----------] 1 test from test_amx
[ RUN ] test_amx.test_gepdot
Gflop/s: 1632.13
[ OK ] test_amx.test_gepdot (1032 ms)
[----------] 1 test from test_amx (1032 ms total)
4. 设计分块方案
如果在没有AI Compiler提前优化的情况下, 我们是没办法得到内存优化好的输入数据的, 那么就需要考虑计算的同时进行布局优化. 并且上一节的例子中我没有设置很大的M和N, 而现实中需要切换M与N, 此时又带来另一个分块大小的问题.
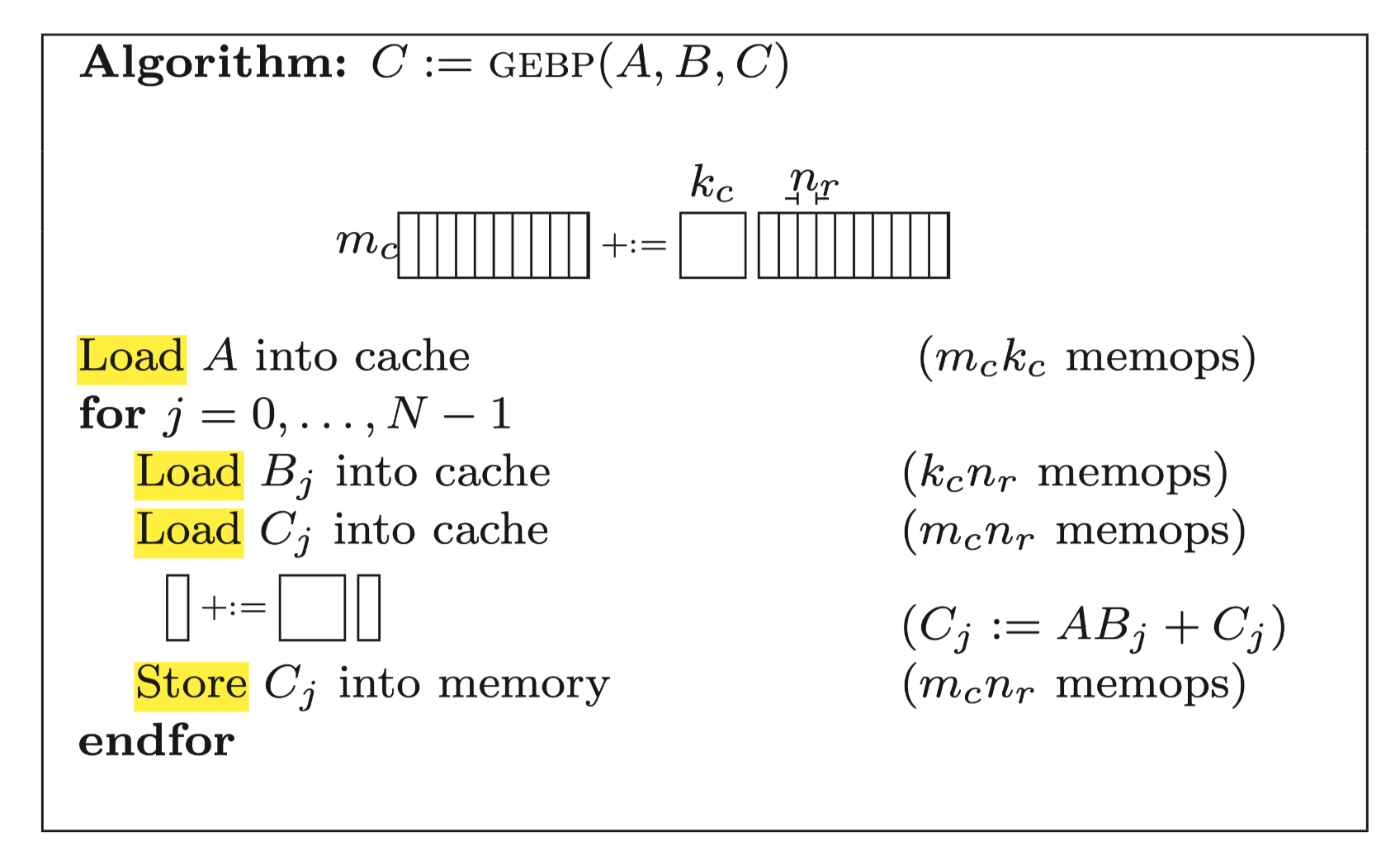
如果是使用SIMD来进行计算, 那么论文Anatomy of High-Performance Matrix Multiplication中已经给出了一个很好的分块解决方案:
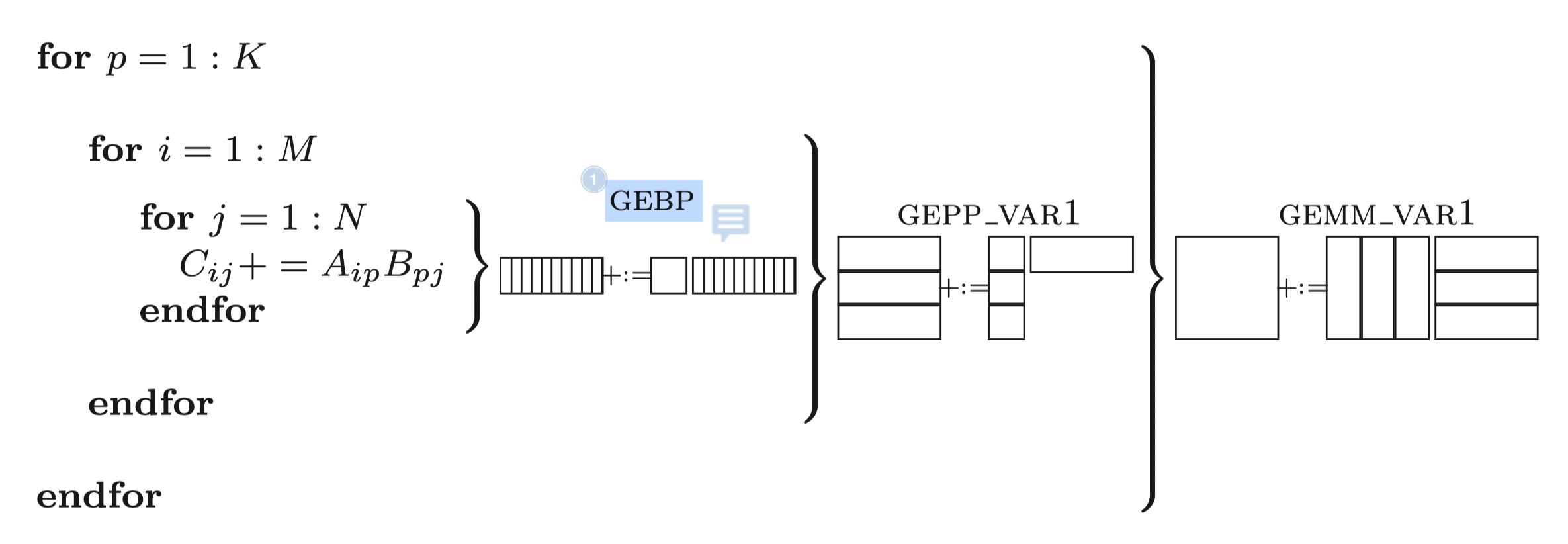
即最内层使用gebp核.
但是gebp它需要反复的加载和存储C矩阵,
对于CPU寄存器来说他的带宽足够大,
只需要Nr远大于Kc就可以均摊掉访问C矩阵的内存开销,
对于AMX来说Z寄存器的带宽只有X/Y寄存器带宽的几十分之一, 显然是无法均摊的,
因此我们肯定不能采用论文中的计算方法:
因此我这里抛砖引玉, 实现了一个简易的两级分块策略,
M中循环N用于复用A矩阵, 把K迭代放在循环最内层以适配gepdot核,
同时在每个KTile中pack一小块A并缓存起来, 这样循环N时可以避免重复执行:
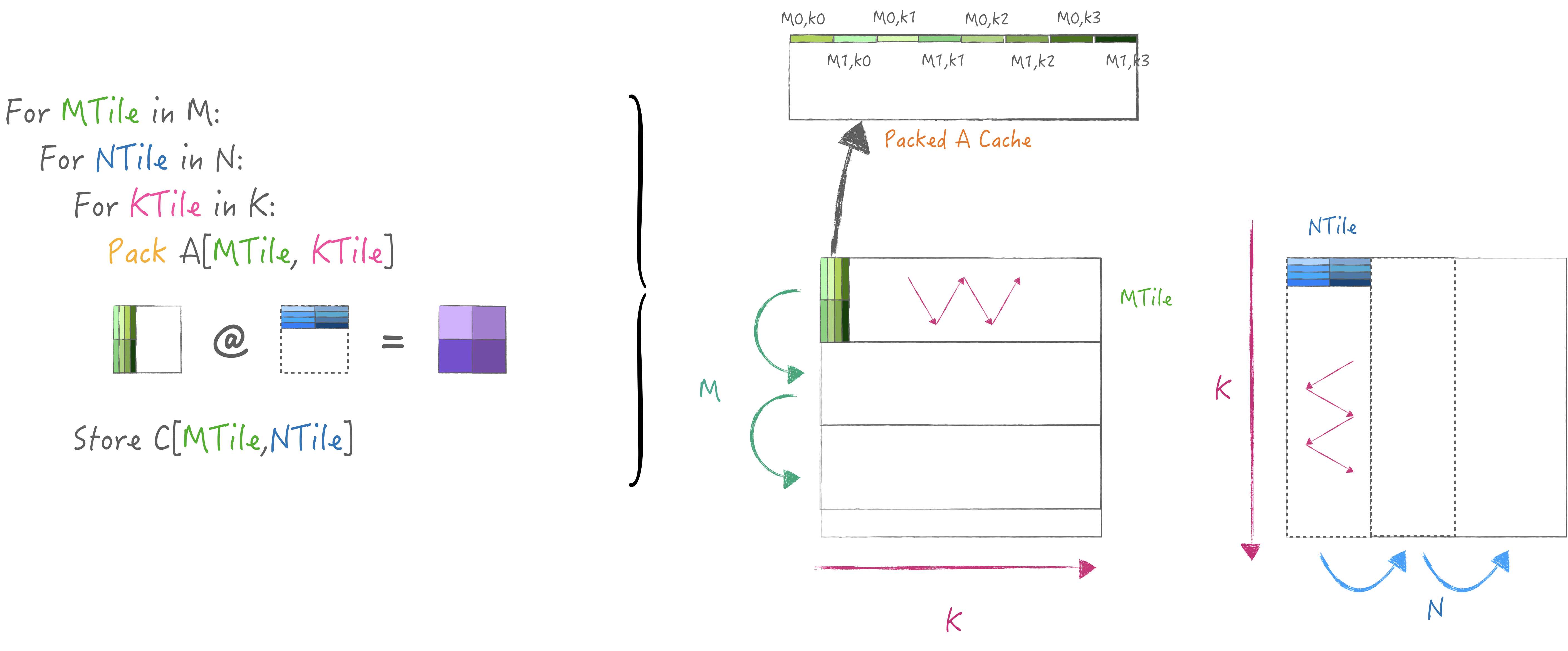
最终代码如下:
auto matmul = [&]() -> void {
constexpr size_t KTile = 32, MTile = 32, NTile = 32;
for (size_t mo = 0; mo < M; mo += MTile) {
float PackedA[K][MTile];
for (size_t no = 0; no < N; no += NTile) {
for (size_t ko = 0; ko < K; ko += KTile) {
// each time pack local innertile.
if (no == 0) {
for (size_t mi = 0; mi < MTile; mi++) {
for (size_t i = ko; i < ko + KTile; i++) {
PackedA[i][mi] = A[mo + mi][i];
}
}
}
gepdot_general<KTile, M, K, N>(false, (ko + KTile == K), mo, ko, no,
PackedA + ko, B, C);
}
}
}
};
测试性能达到了Apple所提供库的70%性能:
[ RUN ] test_amx.test_gepdot_general
gepdot general Gflop/s: 998.291
cblas_sgemm Gflop/s: 1398.95
[ OK ] test_amx.test_gepdot_general (582 ms)
其实计算策略3中是计算瓶颈的,
按理论值计算流水之后实际大约还剩0.3ns时间可以分配给数据加载,
如果可以很好的建模CPU内存操作耗时, 理论上是可以做到把pack
A矩阵的过程掩盖起来, 从而达到理论峰值. 不过从cblas_sgemm的实测性能来看,
应该也没有完全掩藏起来,
超越Apple闭源库这个具有挑战性的任务就交给读者们了👻.
我设计了一个测试AMX加载数据是否会更新cache的用例:
constexpr size_t K = (65536 / 4 / (16 * 2)) * 8; /* 65536 是cache size */
float N[1][16 * 2]{};
float M[K][16 * 2]{};
float *C = (float *)malloc(K * 65536);
auto func1 = [&N]() {
for (size_t i = 0; i < K; i++) {
AMX_LDX(ldxy().multiple().register_index(0).bind((void *)N[0]));
}
}
auto func2 = [&M]() {
for (size_t i = 0; i < K; i++) {
AMX_LDX(ldxy().multiple().register_index(0).bind((void *)M[i]));
}
}
auto func3 = [&C]() {
for (size_t i = 0; i < K; i++) {
AMX_LDX(
ldxy().multiple().register_index(0).bind((void *)(C + i * K)));
}
}
其中func1永远只加载同一个位置的数据, func2按顺序加载连续的数据, func3每次加载跨度大于l1 cache size的数据, 最终结果如下:
func1: 29.9743 GB/s
func2: 219.201 GB/s
func3: 9.74711 GB/s
func2与func3的结果表示l1 cache对于AMX来说也是重要的, 但是我无法理解func1与func2的差异, 理论上被访问过的数据应该会缓存在cache中, 而从结果上来看被缓存的似乎是当前所加载地址后面部分的数据, 这个问题可能需要更了解体系结构的读者才能解答.
至此本文所有的内容介绍完毕, 我所使用的全部测试代码在这里获取(Verified on M2 Pro). 而本文所依赖的信息来源于Peter Cawley等人的逆向成果, 其中包含了更多指令介绍以及使用方法.
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK