
4

彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
source link: https://mp.weixin.qq.com/s?__biz=MzU1MjY4MTA1MQ%3D%3D&mid=2247591245&idx=1&sn=2209db0eb3152b1fd57d709d63a78497&scene=21
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
工坊
3D视觉工坊
2021-12-22 23:02
高精地图作为自动驾驶的眼睛,在自动驾驶研发中占据极大的份额,而激光SLAM则是高精地图定位导航算法的关键技术,其重要性不言而喻,在AI产品如矿卡、汽车、清扫车和扫地机器人等领域都占据一席之地。在没有激光SLAM的日子,对于机器人的控制只能以人主观为准,辅以遥控控制;而激光SLAM技术的出现彻底解决了机器人研究领域中“我在哪儿”的问题,使机器人在未知环境中的自主移动成为可能,并且随着激光雷达价格的下降,越来越多的行业头部公司都选择将其作为感知模块的主要传感器,同时辅以视觉和毫米波雷达,以期实现完全无人化的自动驾驶,因此也就出现重金招聘相关算法优秀工程技术人员的现象;激光SLAM由于建图定位精度高,受环境影响较小的特点,在室内定位与自动驾驶领域越来越受到青睐,其中gmapping与cartographer发展成熟,建图精准,LOAM系列最新开源框架LIO-SAM更是将GPS数据接入算法,在室外建图定位方面取得了里程碑式的进步。
目前整套课程已完成录制制作,视频+离线数据+源码+课后习题+解答均已完整呈现;
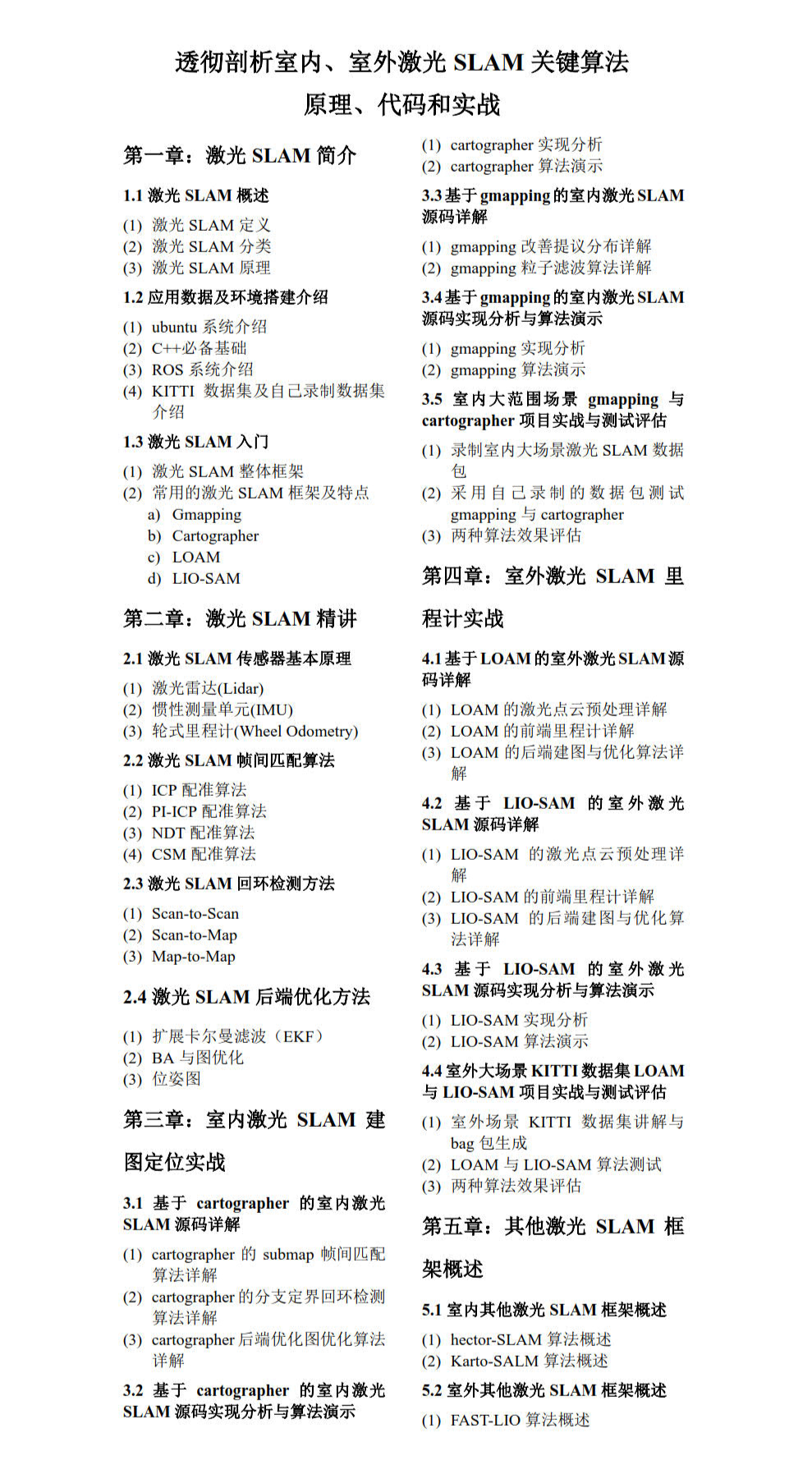 课程内容
课程内容


QQ咨询群:910070197
▲课程咨询QQ群,了解更多 ▲长按加客服微信,咨询更多点击“阅读原文”也可直接购买课程
▲长按加客服微信,咨询更多点击“阅读原文”也可直接购买课程
室内建图定位效果图
室外建图定位效果图
如何快速入门到精通现有激光SLAM算法框架繁杂,应用场景多样,即便如此,在具体项目中也不能直接应用,针对具体的应用场景,需要对算法框架和参数进行一定的调整。因此,读懂各种激光SLAM框架就显得尤其重要了。然而,在研人员大都不是科班出身,数学和编程能力弱,因此,如何深入浅出的对室内室外各种场景下的激光SLAM算法做到融会贯通是本课程的重点内容。为此,3D视觉工坊推出了面向工业级实战类的激光SLAM学习课程《面向室内室外的激光SLAM关键算法与实现》,主讲忆枫,某军工企业特种无人车辆主任算法工程师,拥有5年激光SLAM算法理论和工程实践经验,将从室内室外两种应用场景,结合四种激光SLAM框架讲解,助力小白快速有效入门激光SLAM,成功斩获各个大厂offer。目前整套课程已完成录制制作,视频+离线数据+源码+课后习题+解答均已完整呈现;
▲微信扫码可享受8.5折购买、学习课程
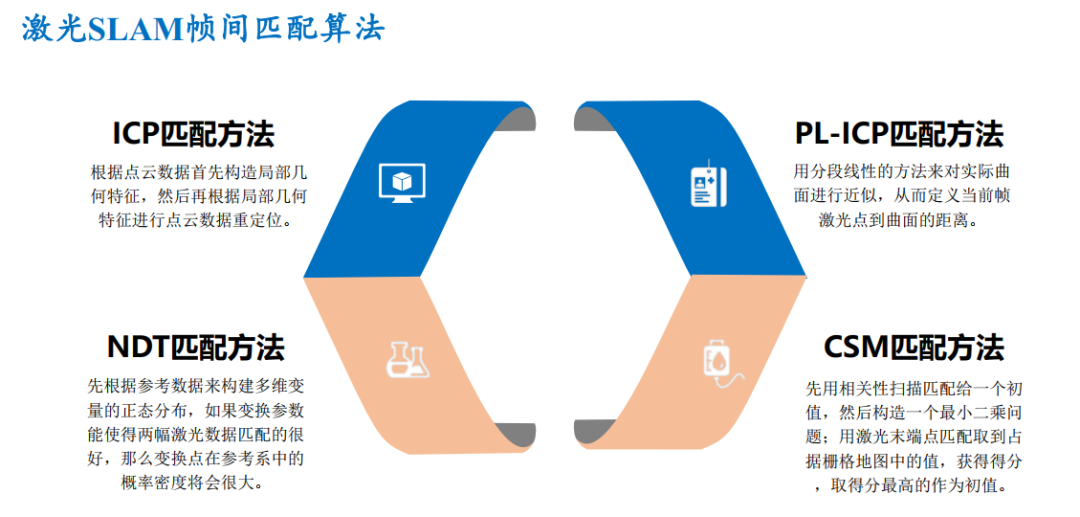
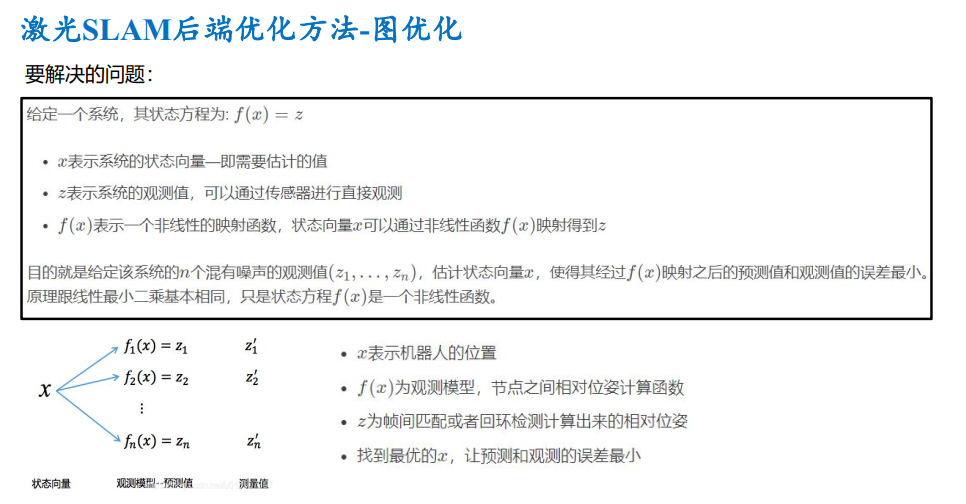
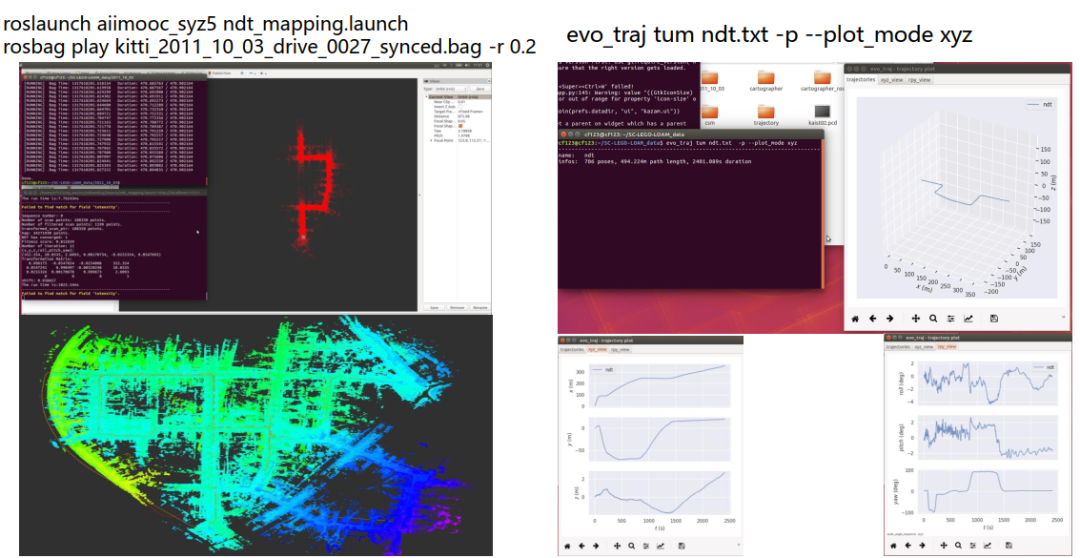
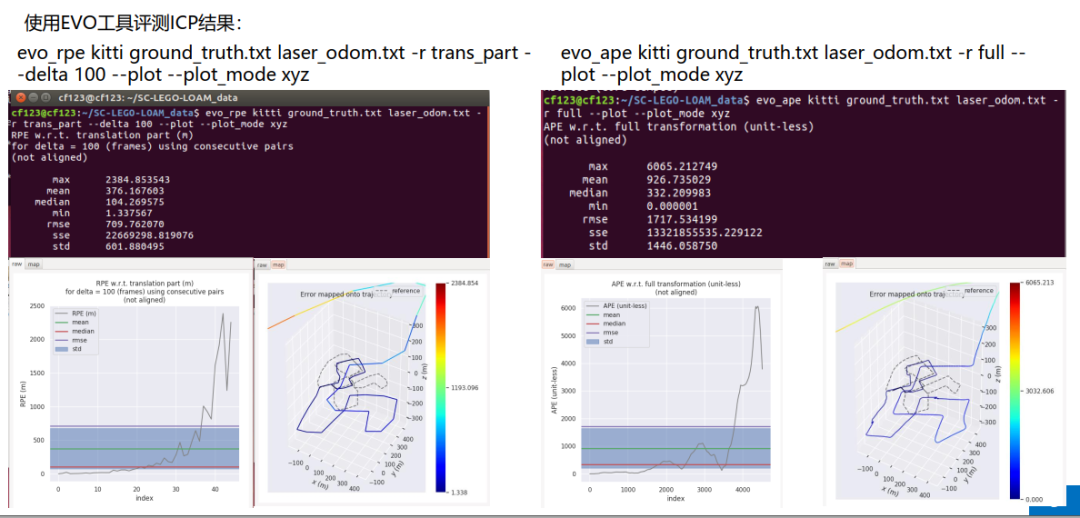
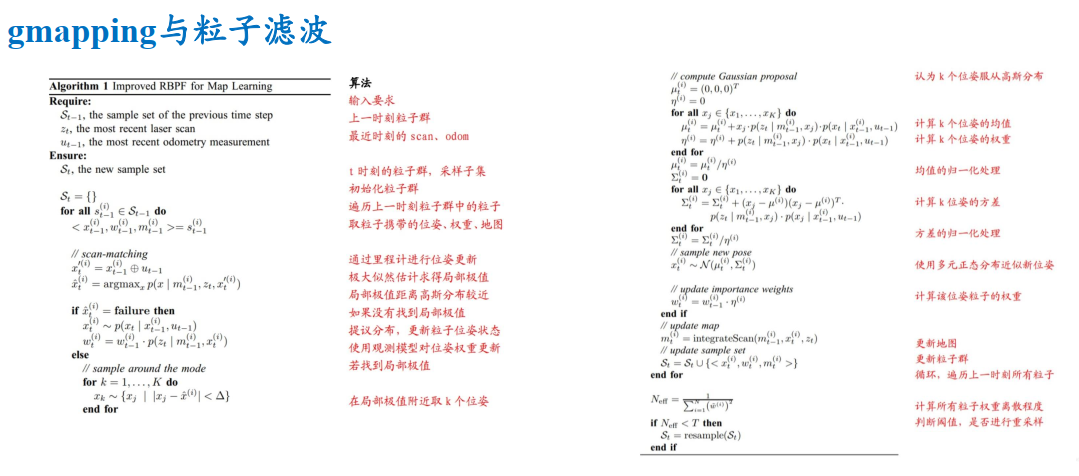
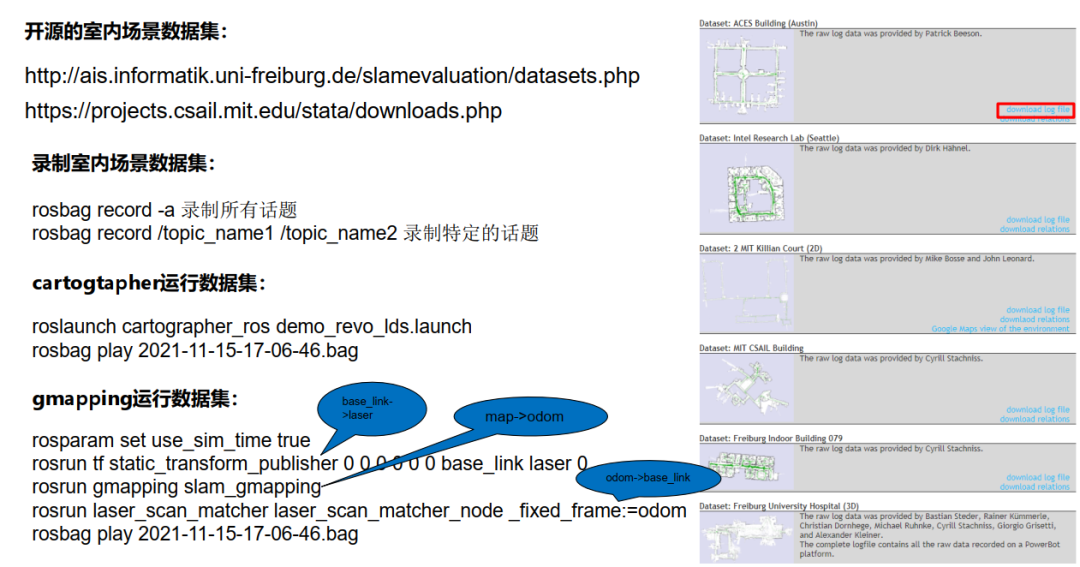
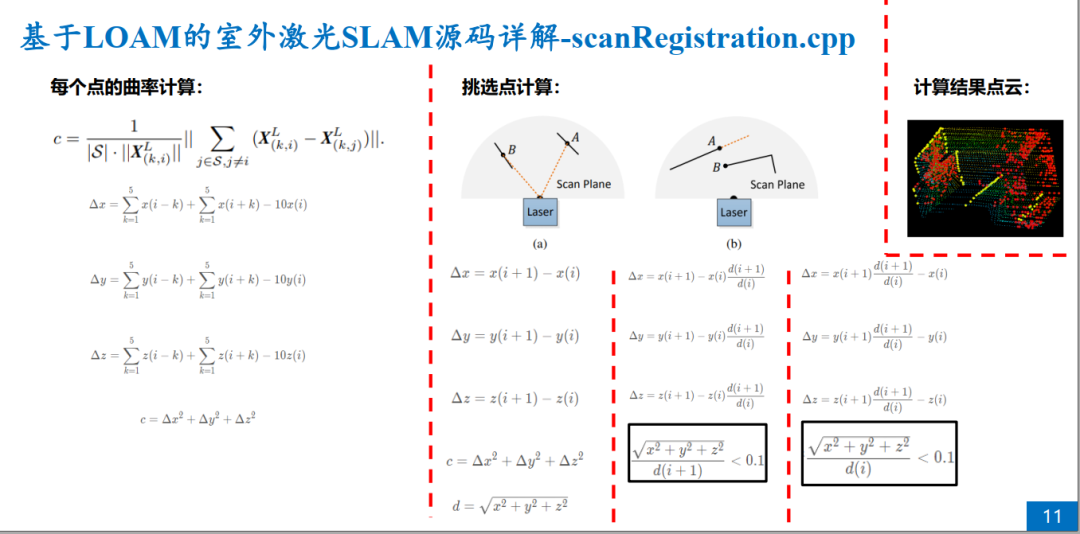
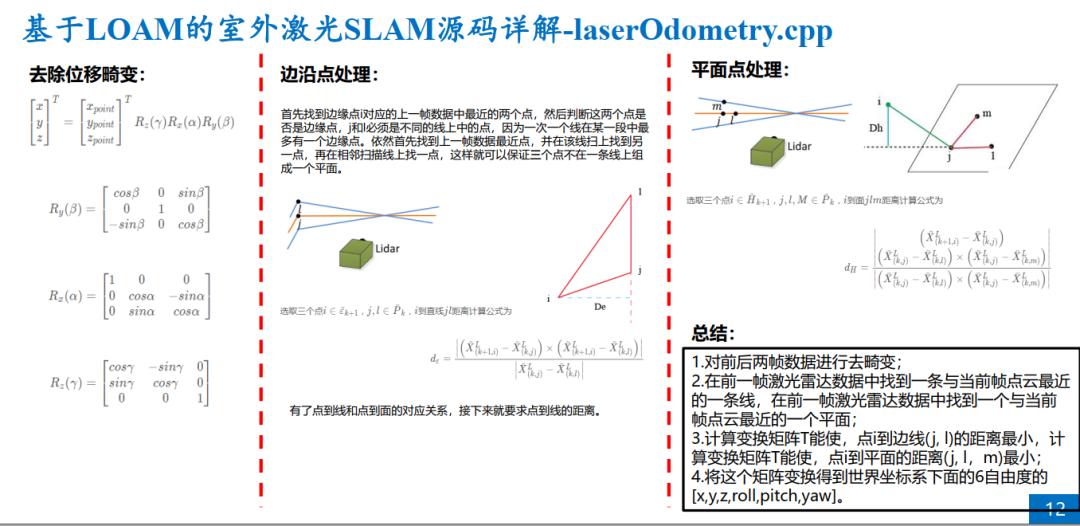
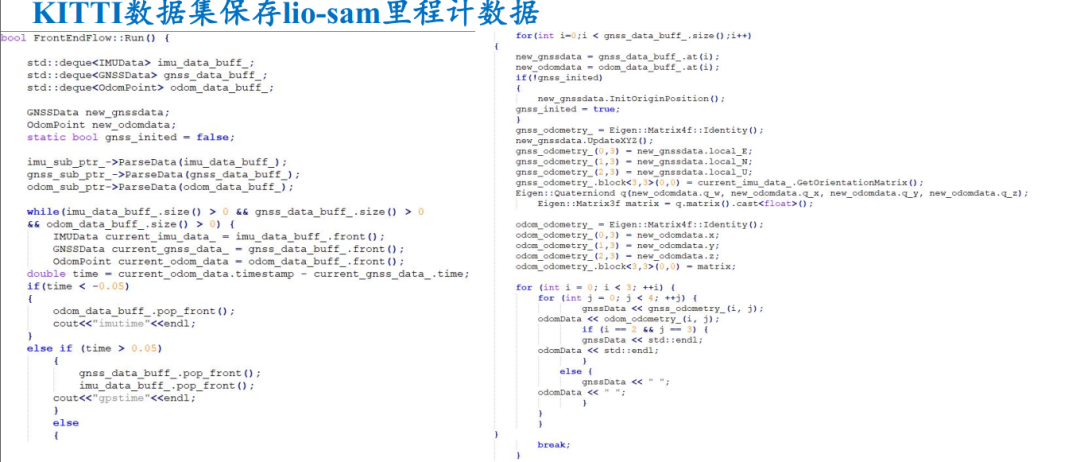
本课程结合理论和实践两大部分:理论部分将全面介绍激光SLAM的基础知识与其帧间匹配、回环检测和后端优化方法;实践部分将以室内室外两个经典场景从gmapping,cartographer,loam和LIO-SAM四个经典框架的激光SLAM方法入手,着重讲解LIO-SAM框架,刨析源代码让学员真正理解相关算法的实现。
课程大纲主要模块:
课件与资料:
课件部分内容展示:
讲师介绍
讲师忆枫,某军工企业特种无人车辆主任算法工程师,拥有5年激光SLAM算法理论和工程实践经验,将从室内室外两种应用场景,结合四种激光SLAM框架讲解,助力小白快速有效入门激光SLAM,成功斩获各个大厂offer。课程亮点
1.国内首个多场景多应用激光SLAM系列教程;2.优良的学习氛围和学术交际圈,可以与各大公司、各大科研机构的人才相互交流沟通;3.循序渐进,由表及里,由浅入深,从理论到具体应用;4.真正能面向工业落地的内容分享;课程收获1.通过课程的学习,对于室内室外多种场景的激光SLAM从前端匹配,回环检测到后端优化三个方面驾轻就熟;2.对于经典的室内激光SLAM算法可以做到融汇贯通,能够从多种角度多种场景具体实现;3.对于最新开源的室外激光SLAM算法LIO-SAM有深入的理解与感悟,学会如何接入GPS数据,提高建图精准度;4.可以建立良好的交流沟通圈子,在择业或者跳槽方面给予极大的理论与实际支持;适合人群1.理工科背景,具备一定的C++编程经验,熟悉ROS框架;2.熟悉SLAM相关理论知识,对概率论、线性代数、非线性优化等数学理论知识有一定基础;3.希望能够从事激光SLAM或自动驾驶领域的在校本科生、硕士生、博士生以及一线算法工程人员;点击购买与咨询
QQ咨询群:910070197
▲课程咨询QQ群,了解更多
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK