
3

深入分析 constraint_list 话题
source link: https://charon-cheung.github.io/2023/01/16/%E6%BF%80%E5%85%89SLAM/Cartographer/%E6%BA%90%E7%A0%81%E8%A7%A3%E8%AF%BB/%E6%B7%B1%E5%85%A5%E5%88%86%E6%9E%90%20constraint_list%20%E8%AF%9D%E9%A2%98/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

深入分析 constraint_list 话题
深入分析 constraint_list 话题
这个话题是显示所有的约束,包括同一轨迹和不同轨迹的Inter约束,Intra约束。
以Inter constraints, different trajectories 和 Inter residuals, different trajectories为例进行分析,内容如下:
# 每个点的 z为0.0,省略
header:
seq: 0
stamp:
secs: 1673860622
nsecs: 104007813
frame_id: "map"
ns: "Inter constraints, different trajectories"
# 12个点,有6个点相同或极为接近
points:
-
x: 2.93968786067
y: -1.41820975755
-
x: 3.44855066169
y: -1.24014780956
-
x: -0.000569545301176
y: 0.00522600210993
-
x: 3.4816963258
y: -1.19978045681
-
x: 3.45484823588
y: -1.19817846586
-
x: 3.78063457495
y: -1.54584384415
-
x: 3.45484823588
y: -1.19817846586
-
x: 4.61884003257
y: -1.49287256215
-
x: 3.45484823588
y: -1.19817846586
-
x: 4.6545497049
y: -1.84995755765
-
x: 3.45484823588
y: -1.19817846586
-
x: 4.91335613134
y: -2.16836009999
-
header:
seq: 0
stamp:
secs: 1673860622
nsecs: 104007813
frame_id: "map"
ns: "Inter residuals, different trajectories"
# 12个点,有些点很接近,结果构成的线很短
points:
-
x: 3.44855066169
y: -1.24014780956
-
x: 3.47573816704
y: -1.1999840042
-
x: 3.4816963258
y: -1.19978045681
-
x: 3.47896481246
y: -1.20118000282
-
x: 3.78063457495
y: -1.54584384415
-
x: 3.80065304682
y: -1.55796489639
-
x: 4.61884003257
y: -1.49287256215
-
x: 4.65790271882
y: -1.44107978827
-
x: 4.6545497049
y: -1.84995755765
-
x: 3.00991092288
y: -2.53605574275
-
x: 4.91335613134
y: -2.16836009999
-
x: 3.11523021674
y: -2.61951559764
源码中可以看到Rviz显示的是LINE_LIST类型的visualization_msgs::Marker,这里要提一下Rviz显示的线类型,如下
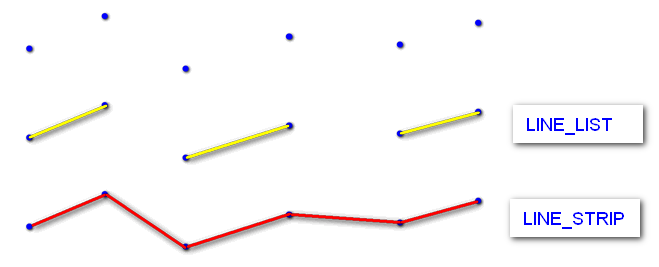
LINE_LIST是两两连接而成的线段,在carto这里,点数一定为偶数。把上面消息内容,没两个点的坐标连线,就可以得到Rviz里的显示
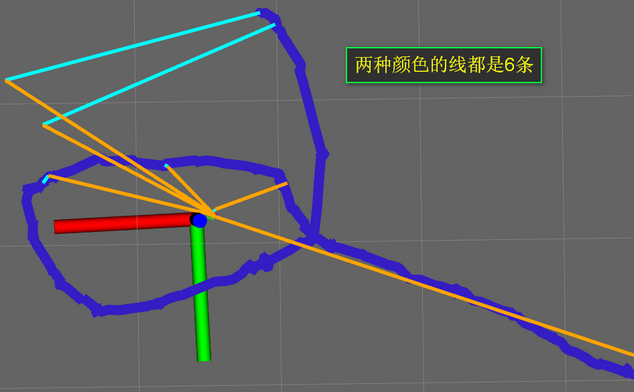
黄线有6条,水绿线有2条比较长,仔细还能看到3条很短的,最后一条在坐标系附近,肉眼已经看不到。Inter约束和residual个数相同,有一个共同的端点原因可以看源码。
看MapBuilderBridge::GetConstraintList源码部分有些跳过了
const auto trajectory_node_poses =
map_builder_->pose_graph()->GetTrajectoryNodePoses();
const auto submap_poses = map_builder_->pose_graph()->GetAllSubmapPoses();
const auto constraints = map_builder_->pose_graph()->constraints();
for (const auto& constraint : constraints)
{
const auto submap_it = submap_poses.find(constraint.submap_id);
if (submap_it == submap_poses.end()) {
continue;
}
const auto& submap_pose = submap_it->data.pose;
const auto node_it = trajectory_node_poses.find(constraint.node_id);
if (node_it == trajectory_node_poses.end()) {
continue;
}
const auto& trajectory_node_pose = node_it->data.global_pose;
const Rigid3d constraint_pose = submap_pose * constraint.pose.zbar_ij;
// Inter constraints, different trajectories 线段的两个端点
constraint_marker->points.push_back(
ToGeometryMsgPoint(submap_pose.translation()));
constraint_marker->points.push_back(
ToGeometryMsgPoint(constraint_pose.translation()));
// Inter residuals, different trajectories 线段的两个端点
residual_marker->points.push_back(
ToGeometryMsgPoint(constraint_pose.translation()));
residual_marker->points.push_back(
ToGeometryMsgPoint(trajectory_node_pose.translation()));
从最后可以看出,共同的端点是constraint_pose,map坐标系下。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK