

Pytorch:单卡多进程并行训练 - orion-orion
source link: https://www.cnblogs.com/orion-orion/p/17066473.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

Pytorch:单卡多进程并行训练
我们在博客《Python:多进程并行编程与进程池》中介绍了如何使用Python的multiprocessing模块进行并行编程。不过在深度学习的项目中,我们进行单机多进程编程时一般不直接使用multiprocessing模块,而是使用其替代品torch.multiprocessing模块。它支持完全相同的操作,但对其进行了扩展。
Python的multiprocessing模块可使用fork、spawn、forkserver三种方法来创建进程。但有一点需要注意的是,CUDA运行时不支持使用fork,我们可以使用spawn或forkserver方法来创建子进程,以在子进程中使用CUDA。创建进程的方法可用multiprocessing.set_start_method(...) API来进行设置,比如下列代码就表示用spawn方法创建进程:
import torch.multiprocessing as mp
mp.set_start_method('spawn', force=True)
事实上,torch.multiprocessing在单机多进程编程中应用广泛。尤其是在我们跑联邦学习实验时,常常需要在一张卡上并行训练多个模型。注意,Pytorch多机分布式模块torch.distributed在单机上仍然需要手动fork进程。本文关注单卡多进程模型。
2 单卡多进程编程模型
我们在上一篇文章中提到过,多进程并行编程中最关键的一点就是进程间通信。Python的multiprocessing采用共享内存进行进程间通信。在我们的单卡多进程模型中,共享内存实际上可以直接由我们的CUDA内存担任。
可能有读者会表示不对啊,Pytorch中每个张量有一个tensor.share_memory_()用于将张量的数据移动到主机的共享内存中呀,如果CUDA内存直接担任共享内存的作用,那要这个API干啥呢?实际上,tensor.share_memory_()只在CPU模式下有使用的必要,如果张量分配在了CUDA上,这个函数实际上为空操作(no-op)。此外还需要注意,我们这里的共享内存是进程间通信的概念,注意与CUDA kernel层面的共享内存相区分。
注意,Python/Pytorch多进程模块的进程函数的参数和返回值必须兼容于
pickle编码,任务的执行是在单独的解释器中完成的,进行进程间通信时需要在不同的解释器之间交换数据,此时必须要进行序列化处理。在机器学习中常使用的稀疏矩阵不能序列化,如果涉及稀疏矩阵的操作会发生异常:NotImplementedErrorCannot access storage of SparseTensorImpl,在多进程编程时需要转换为稠密矩阵处理。
3 实例: 同步并行SGD算法
我们的示例采用在博客《分布式机器学习:同步并行SGD算法的实现与复杂度分析(PySpark)》中所介绍的同步并行SGD算法。计算模式采用数据并行方式,即将数据进行划分并分配到多个工作节点(Worker)上进行训练。同步SGD算法的伪代码描述如下:
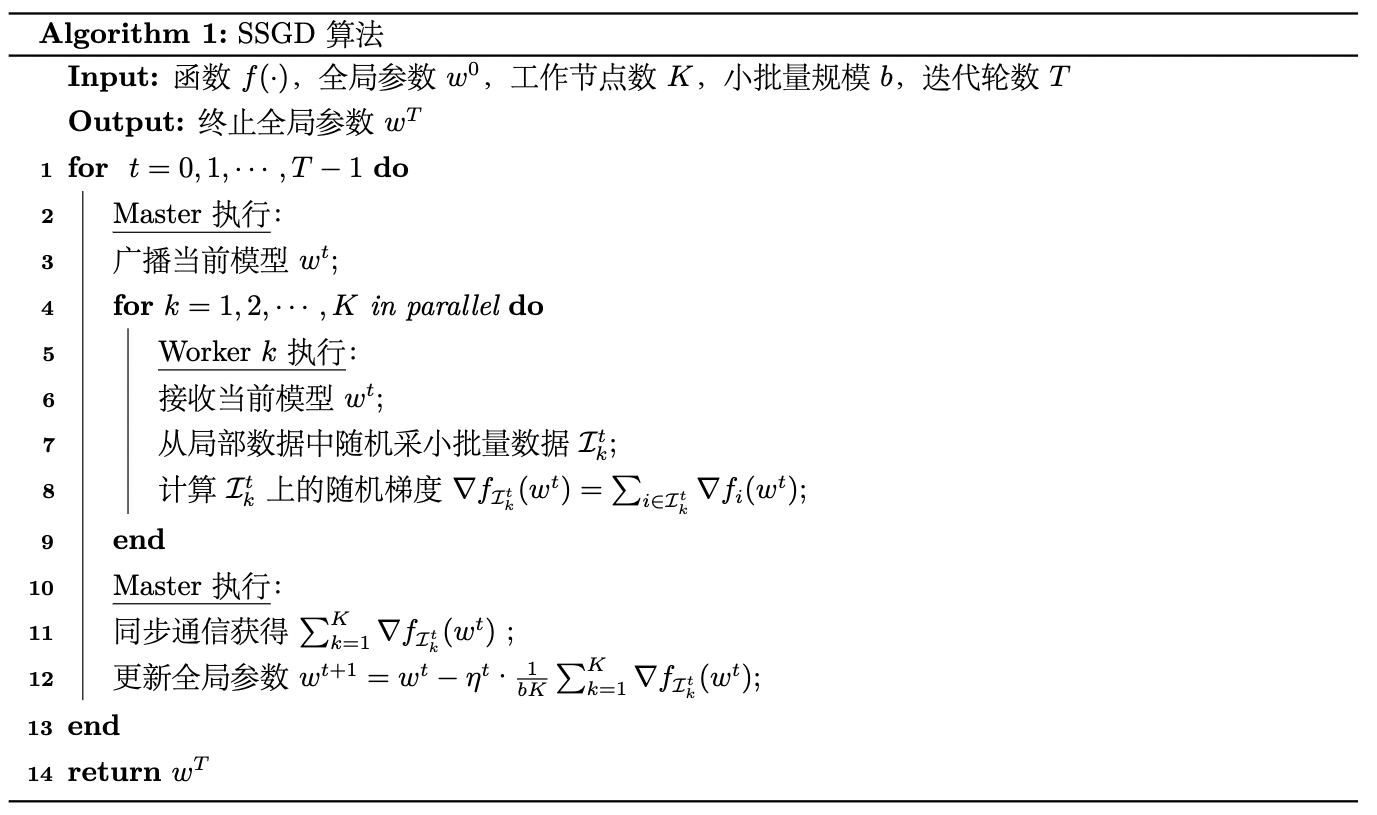
注意,我们此处的多进程共享内存,是无需划分数据而各进程直接对共享内存进行异步无锁读写的(参考Hogwild!算法[3])。但是我们这里为了演示同步并行SGD算法,还是为每个进程设置本地数据集和本地权重,且每个epoch各进程进行一次全局同步,这样也便于我们扩展到同步联邦学习实验环境。
在代码实现上,我们需要先对本地数据集进行划,这里需要继承torch.utils.data.subset以自定义数据集类(参见我的博客《Pytorch:自定义Subset/Dataset类完成数据集拆分 》):
class CustomSubset(Subset):
'''A custom subset class with customizable data transformation'''
def __init__(self, dataset, indices, subset_transform=None):
super().__init__(dataset, indices)
self.subset_transform = subset_transform
def __getitem__(self, idx):
x, y = self.dataset[self.indices[idx]]
if self.subset_transform:
x = self.subset_transform(x)
return x, y
def __len__(self):
return len(self.indices)
def dataset_split(dataset, n_workers):
n_samples = len(dataset)
n_sample_per_workers = n_samples // n_workers
local_datasets = []
for w_id in range(n_workers):
if w_id < n_workers - 1:
local_datasets.append(CustomSubset(dataset, range(w_id * n_sample_per_workers, (w_id + 1) * n_sample_per_workers)))
else:
local_datasets.append(CustomSubset(dataset, range(w_id * n_sample_per_workers, n_samples)))
return local_datasets
local_train_datasets = dataset_split(train_dataset, n_workers)
然后定义本地模型、全局模型和本地权重、全局权重:
local_models = [Net().to(device) for i in range(n_workers)]
global_model = Net().to(device)
local_Ws = [{key: value for key, value in local_models[i].named_parameters()} for i in range(n_workers)]
global_W = {key: value for key, value in global_model.named_parameters()}
然后由于是同步算法,我们需要初始化多进程同步屏障:
from torch.multiprocessing import Barrier
synchronizer = Barrier(n_workers)
训练算法流程(含测试部分)描述如下:
for epoch in range(epochs):
for rank in range(n_workers):
# pull down global model to local
pull_down(global_W, local_Ws, n_workers)
processes = []
for rank in range(n_workers):
p = mp.Process(target=train_epoch, args=(epoch, rank, local_models[rank], device,
local_train_datasets[rank], synchronizer, kwargs))
# We first train the model across `num_processes` processes
p.start()
processes.append(p)
for p in processes:
p.join()
test(global_model, device, test_dataset, kwargs)
# init the global model
init(global_W)
aggregate(global_W, local_Ws, n_workers)
# Once training is complete, we can test the model
test(global_model, device, test_dataset, kwargs)
其中的pull_down()函数负责将全局模型赋给本地模型:
def pull_down(global_W, local_Ws, n_workers):
# pull down global model to local
for rank in range(n_workers):
for name, value in local_Ws[rank].items():
local_Ws[rank][name].data = global_W[name].data
init()函数负责给全局模型进行初始化:
def init(global_W):
# init the global model
for name, value in global_W.items():
global_W[name].data = torch.zeros_like(value)
aggregate()函数负责对本地模型进行聚合(这里我们采用最简单的平均聚合方式):
def aggregate(global_W, local_Ws, n_workers):
for rank in range(n_workers):
for name, value in local_Ws[rank].items():
global_W[name].data += value.data
for name in local_Ws[rank].keys():
global_W[name].data /= n_workers
最后,train_epoch和test_epoch定义如下(注意train_epoch函数的结尾需要加上 synchronizer.wait()表示进程间同步):
def train_epoch(epoch, rank, local_model, device, dataset, synchronizer, dataloader_kwargs):
torch.manual_seed(seed + rank)
train_loader = torch.utils.data.DataLoader(dataset, **dataloader_kwargs)
optimizer = optim.SGD(local_model.parameters(), lr=lr, momentum=momentum)
local_model.train()
pid = os.getpid()
for batch_idx, (data, target) in enumerate(train_loader):
optimizer.zero_grad()
output = local_model(data.to(device))
loss = F.nll_loss(output, target.to(device))
loss.backward()
optimizer.step()
if batch_idx % log_interval == 0:
print('{}\tTrain Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
pid, epoch + 1, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
synchronizer.wait()
def test(epoch, model, device, dataset, dataloader_kwargs):
torch.manual_seed(seed)
test_loader = torch.utils.data.DataLoader(dataset, **dataloader_kwargs)
model.eval()
test_loss = 0
correct = 0
with torch.no_grad():
for data, target in test_loader:
output = model(data.to(device))
test_loss += F.nll_loss(output, target.to(device), reduction='sum').item() # sum up batch loss
pred = output.max(1)[1] # get the index of the max log-probability
correct += pred.eq(target.to(device)).sum().item()
test_loss /= len(test_loader.dataset)
print('\nTest Epoch: {} Global loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
epoch + 1, test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
我们在epochs=3、n_workers=4的设置下运行结果如下图所示(我们这里仅展示每个epoch同步通信后,使用测试集对全局模型进行测试的结果):
Test Epoch: 1 Global loss: 0.0858, Accuracy: 9734/10000 (97%)
Test Epoch: 2 Global loss: 0.0723, Accuracy: 9794/10000 (98%)
Test Epoch: 3 Global loss: 0.0732, Accuracy: 9796/10000 (98%)
可以看到测试结果是趋于收敛的。
最后,完整代码我已经上传到了GitHub仓库 [Distributed-Algorithm-PySpark]
,感兴趣的童鞋可以前往查看。
- [1] Pytorch: multiprocessing
- [2] Pytorch: What is the shared memory?
- [3] Recht B, Re C, Wright S, et al. Hogwild!: A lock-free approach to parallelizing stochastic gradient descent[J]. Advances in neural information processing systems, 2011, 24.
Recommend
-
35
-
27
数据并行(DP)是应用最广的并行策略,对在多个设备上部署深度学习模型非常有用。但该方法存在缺陷,如随着训练设备数量不断增加,通信开销不断增长,模型统计效率出现损失等。来自加州大学洛杉矶分校和英伟达的研究人员探索了混合并行化...
-
10
Buddy Yuan的个人技术博客 Steve Jobs is a genius and has an impact on many people 一次并行进程无法开启的问题分析...
-
6
【加速】multiprocessing多线程、多进程、并行、numba 2021年02月13日 Author: Guofei 文章归类: Python语法 ,文章编号: 1208 版权声明:本文作...
-
5
数据并行:提升训练吞吐的高效方法 |深度学习分布式训练专题 数据并行是大规模深度学习训练中非常成熟和常用的并行模式。本文将介绍数据并行的原理和主流实现方案,使用数据并行加速训练过程中需要注意的问题,以及如何优化数据并行进...
-
3
并发和并行、线程和进程,异步和同步之间到底是什么关系? yudotyang · 4天之前 · 260 次点击 ·...
-
6
训练千亿参数大模型,离不开四种GPU并行策略 ...
-
8
随着神经网络模型规模的不断增大,对硬件的显存和算力提出了新的要求。首先模型参数过多,导致单机内存放不下,即使能放得下,算力也跟不上。同时,硬件算力的增长远远比不上模型增长的速度,单机训练变得不再可行,需要并行化分布式训练加速。比如Megatron-Tu...
-
5
1 进程与程序 在Linux系统中,执行一个程序或命令就可以触发一个进程,系统会给予这个进程一个ID,称为PID,同时根据触发这个进程的用户与相关属性关系,基于这个PID一组有效的权限设置。如下图所示(图片来自《鸟哥的Lin...
-
5
基于牛顿求根法,新算法实现并行训练和评估RNN,带来超10倍增速 作者:机器之心 2023-10-07 13:42:00 人们普遍认为 RNN 是无法并行化的,因为其本质上的序列特性:其状态依赖于前一状态。这使得人们难以用长序列来...
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK