

有向图的拓扑排序——DFS - YVVT_Real
source link: https://www.cnblogs.com/YWT-Real/p/17015184.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
有向图的拓扑排序——DFS
在有向图的拓扑排序——BFS这篇文章中,介绍了有向图的拓扑排序的定义以及使用广度优先搜索(BFS)对有向图进行拓扑排序的方法,这里再介绍另一种方法:深度优先搜索(DFS)。
考虑下面这张图:
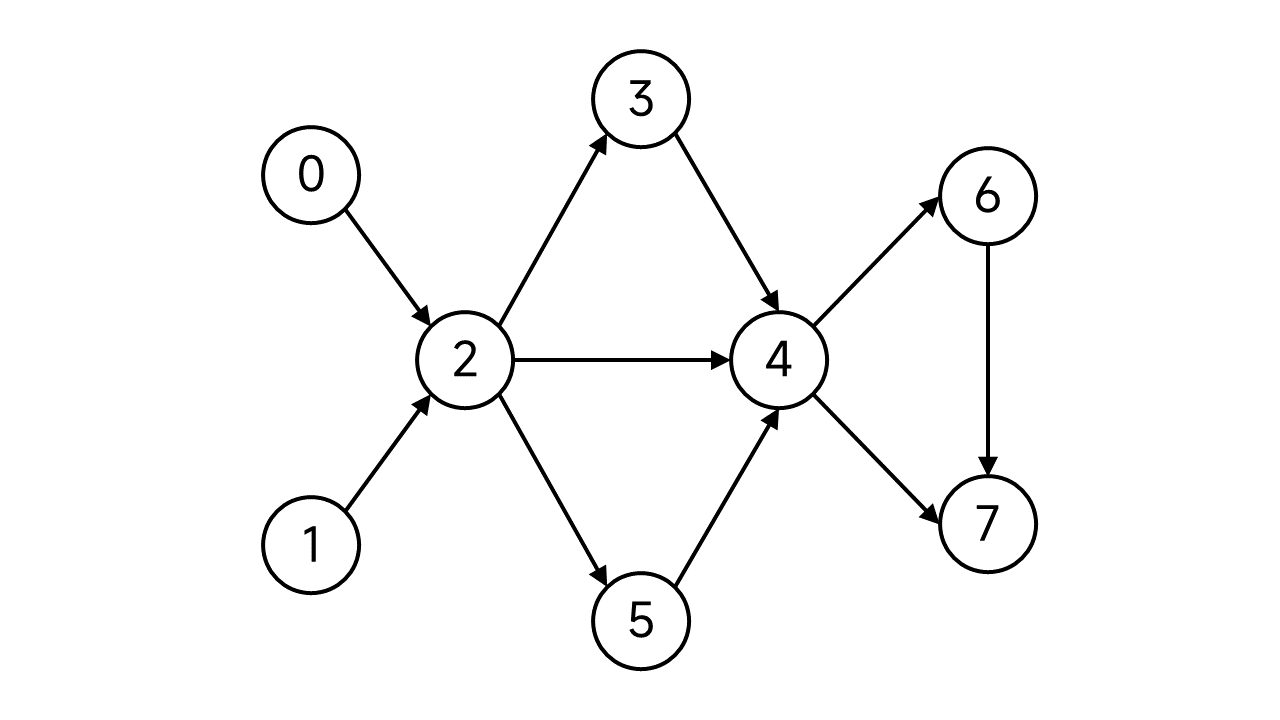
首先,我们需要维护一个栈,用来存放DFS到的节点。另外规定每个节点有两个状态:未访问(这里用蓝绿色表示)、已访问(这里用黑色表示)。
任选一个节点开始DFS,比如这里就从0开始吧。
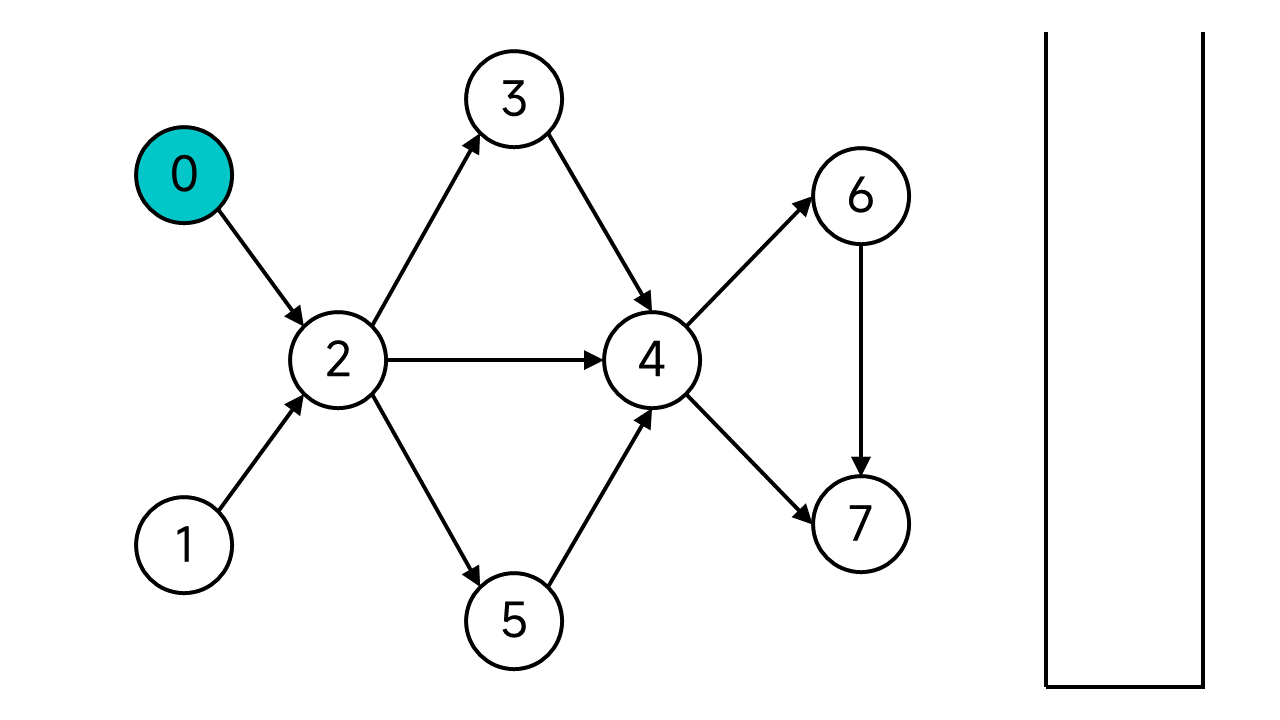
首先将节点0的状态设为已访问,然后节点0的邻居(节点0的出边指向的节点)共有1个:节点2,它是未访问状态,于是顺下去访问节点2。
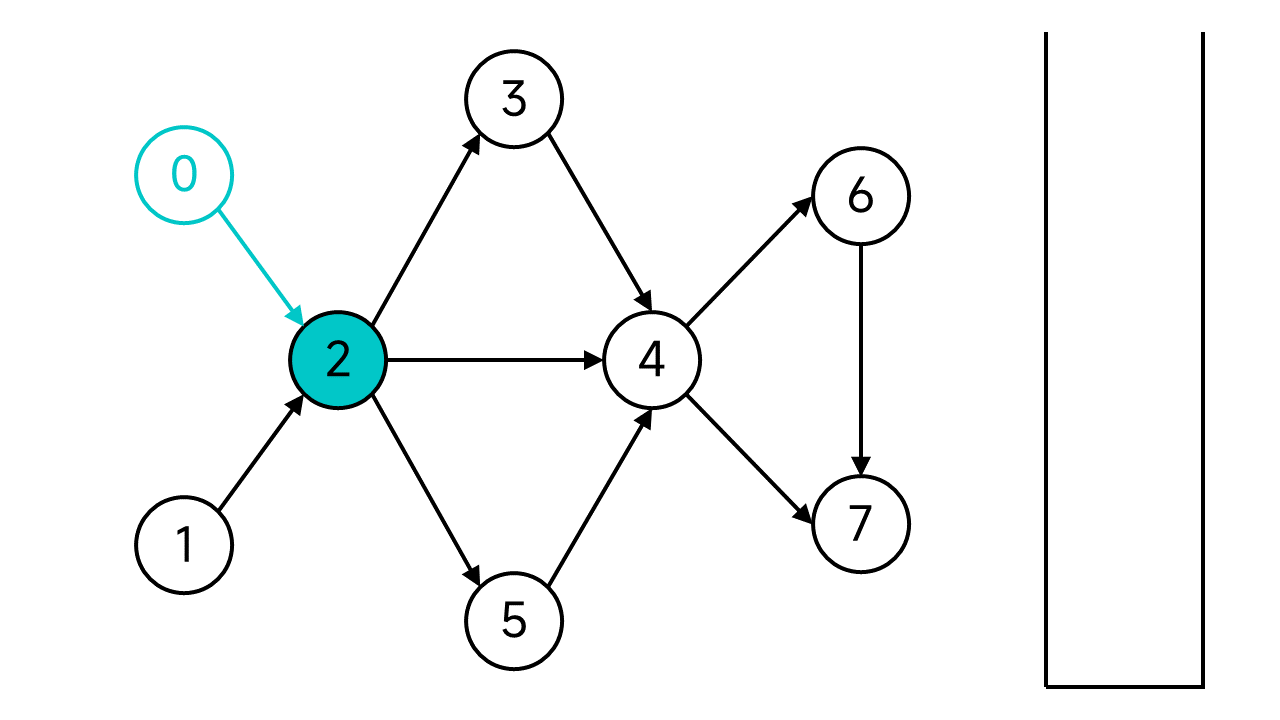
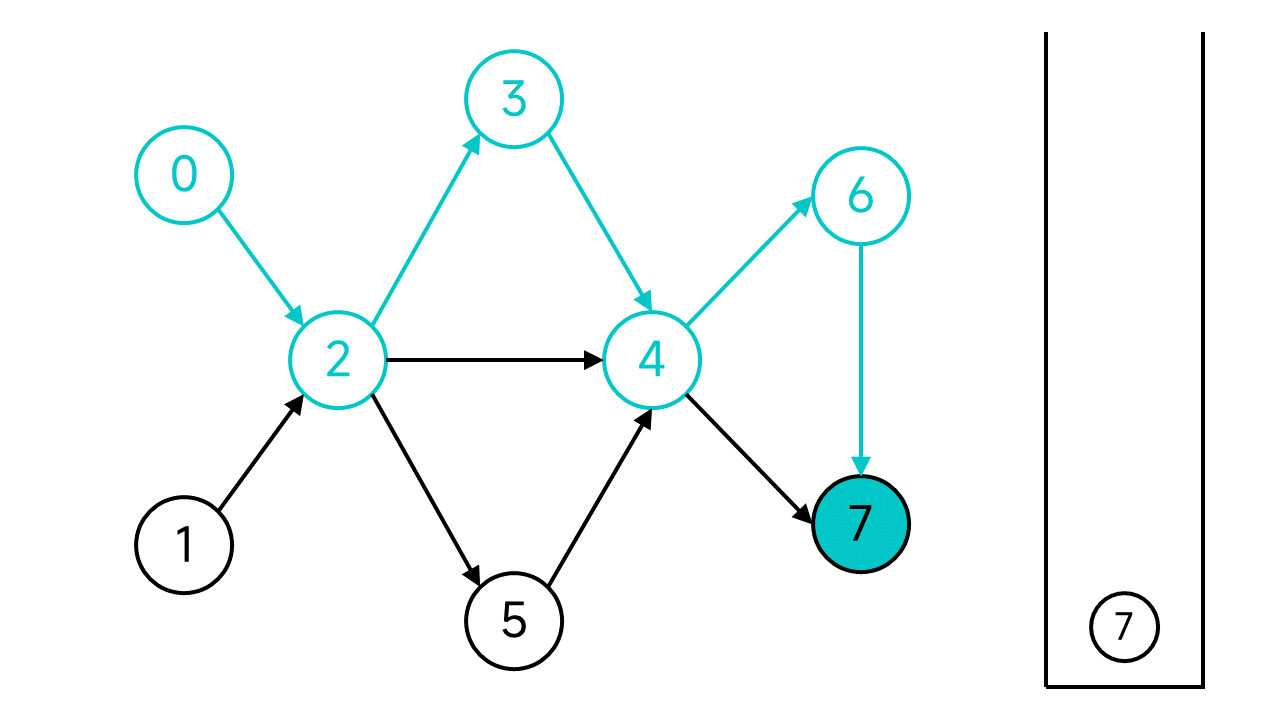
节点2的状态也设为已访问。节点2有3个邻居:3、4、5,都是未访问状态,不妨从3开始。一直这样访问下去,直到访问到没有出边的节点7。
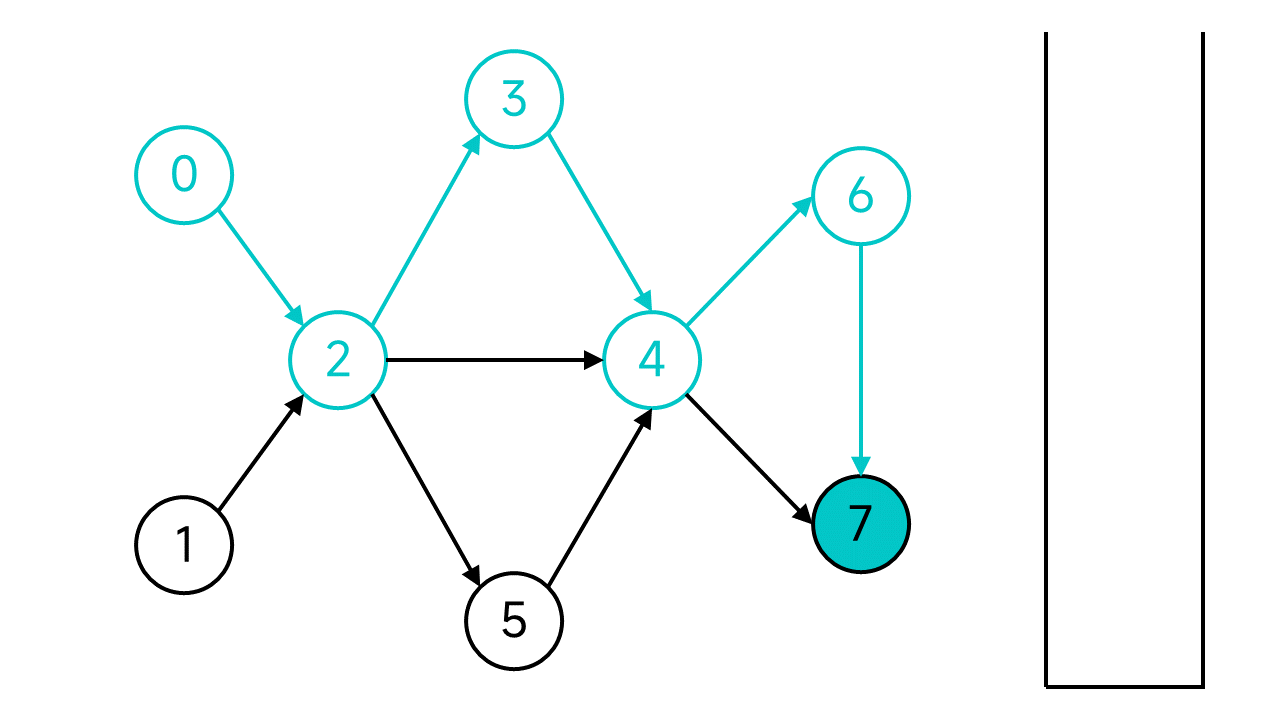
节点7没有出边了,这时候就将节点7入栈。
退回到节点6,虽然6还有邻居,但是唯一的邻居节点7是已访问状态,也入栈。再次退回,节点4的两个邻居也都已访问,依旧入栈并后退。以此类推,退回到节点2。
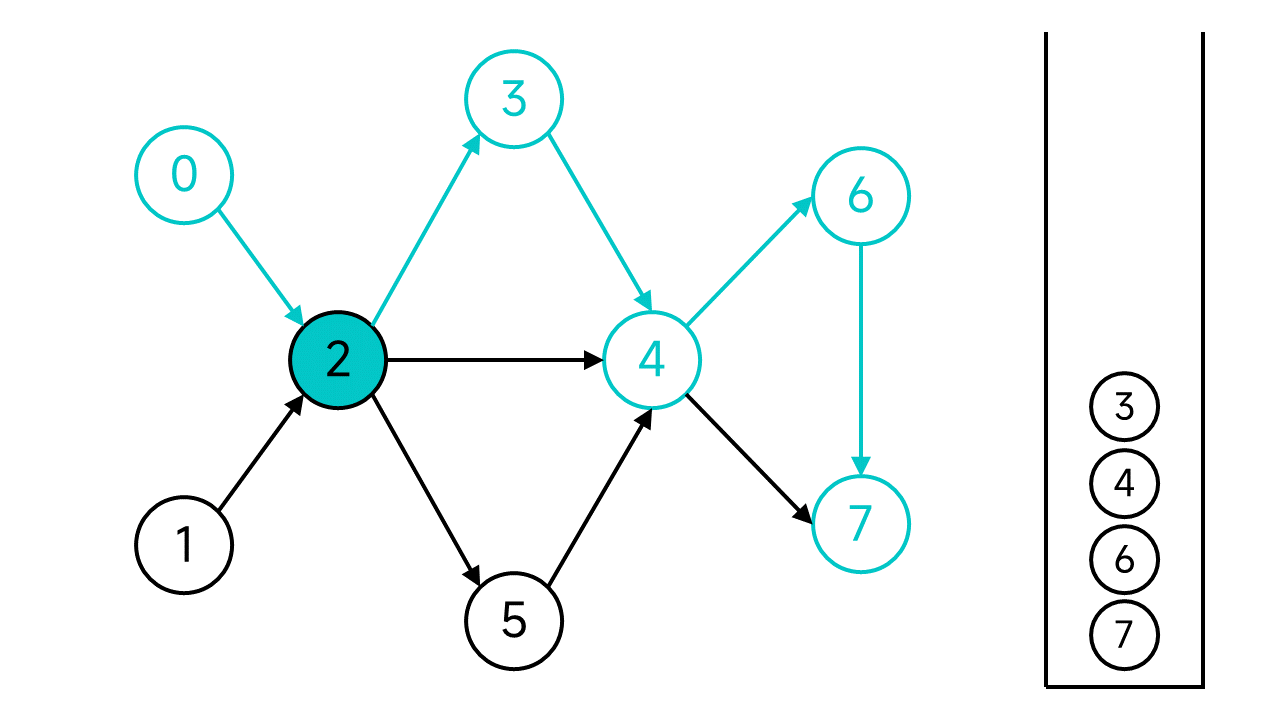
节点2有3个邻居,其中节点3和4已访问,但是节点5还未访问,访问节点5。
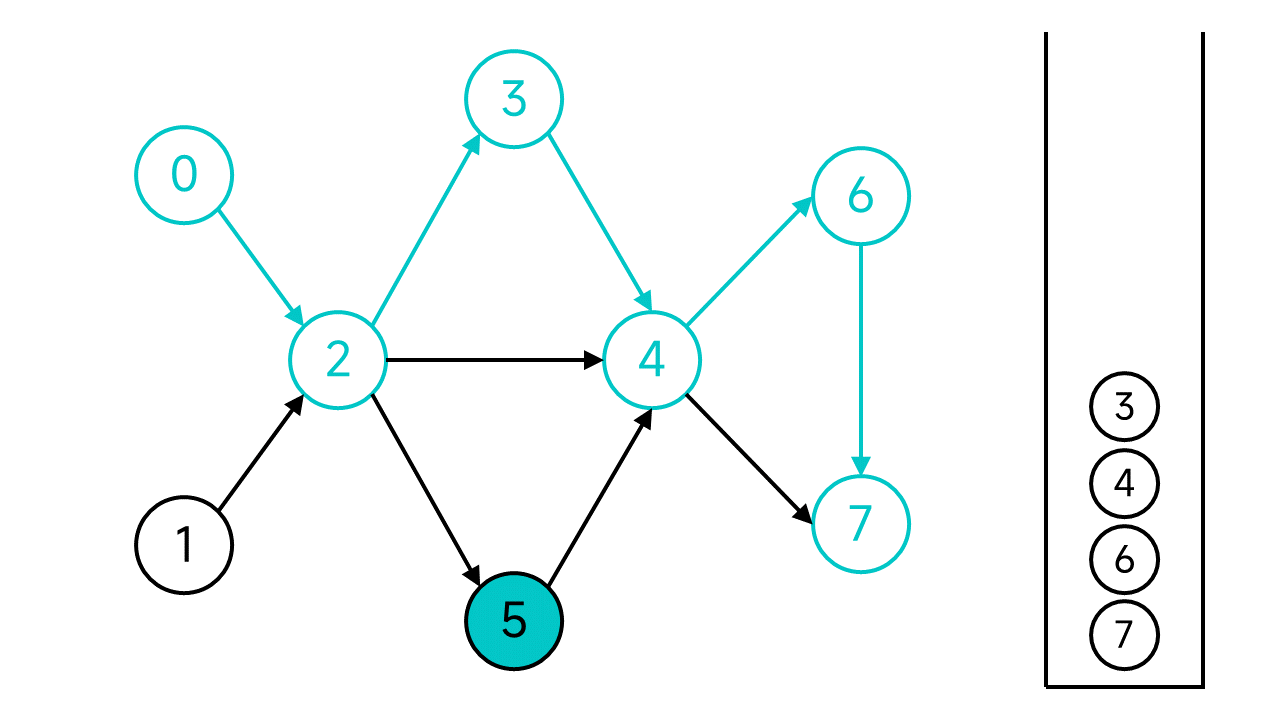
接下来的步骤是一样的,不再赘述了,直接退回到节点0并将0入栈。
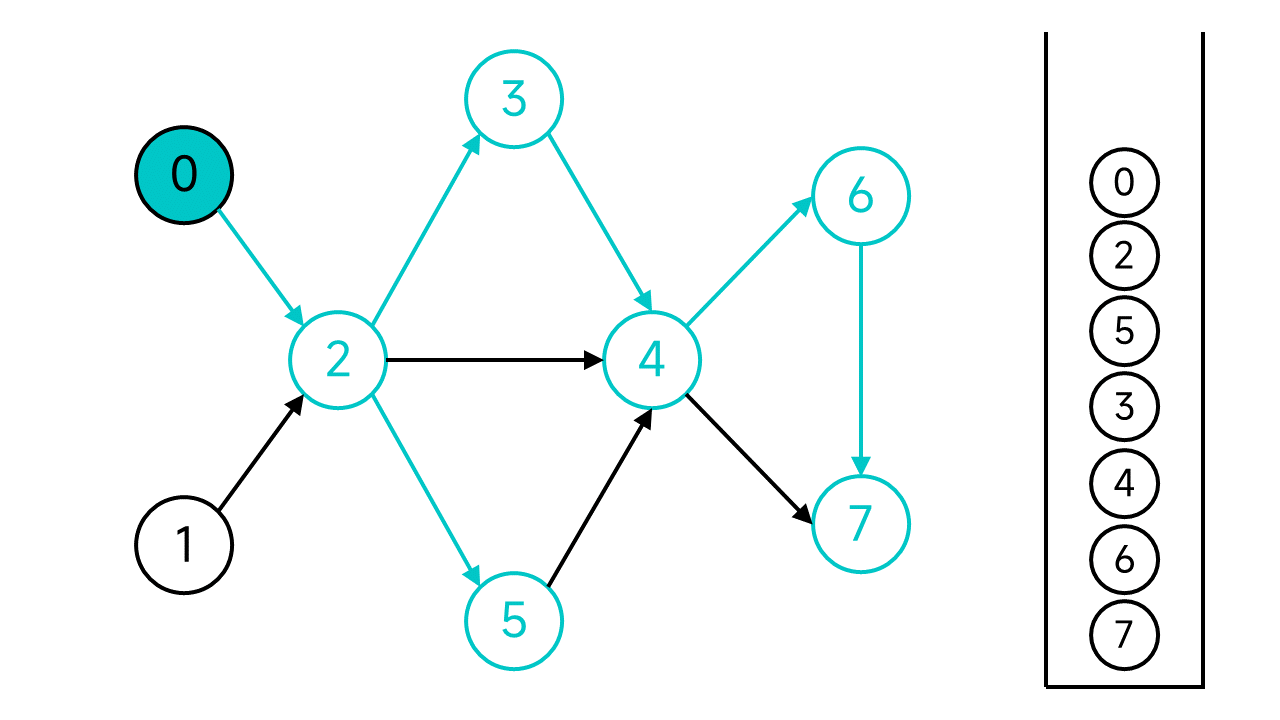
现在,从节点0开始的DFS宣告结束,但是图中还有未访问的节点:节点1,从节点1继续开始DFS。
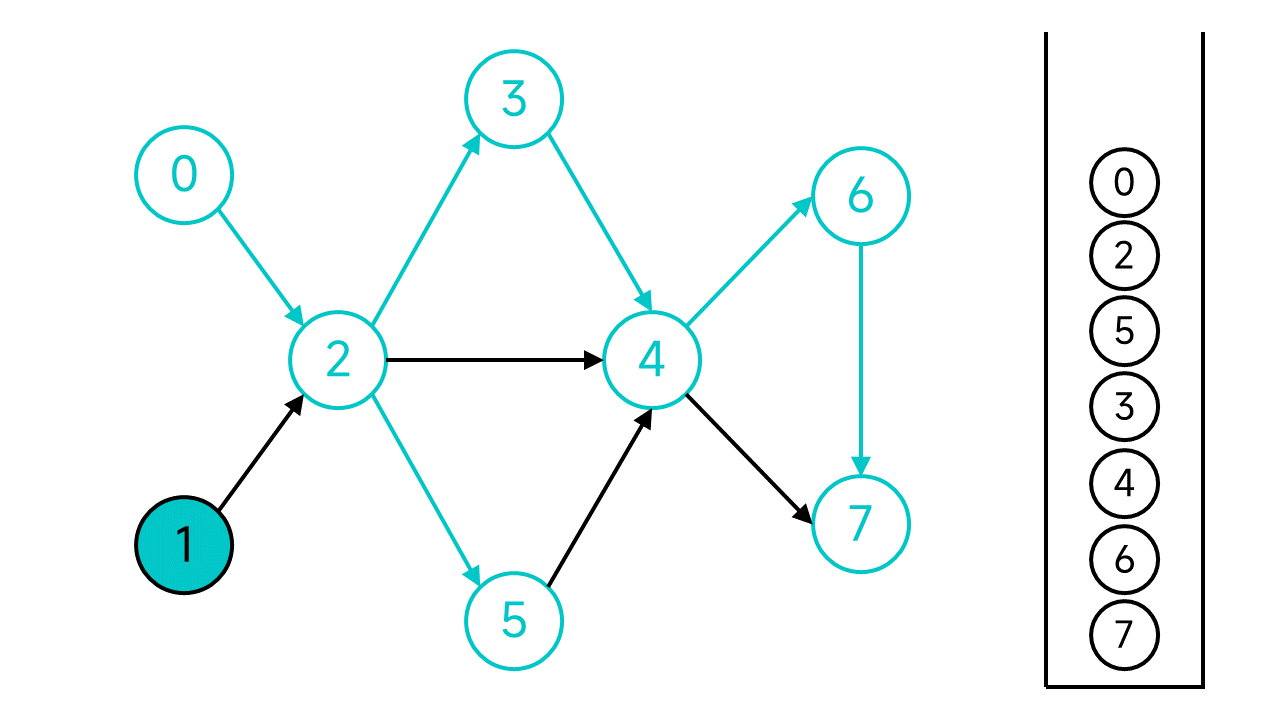
节点1的邻居节点2已经访问过了,直接将节点1入栈。
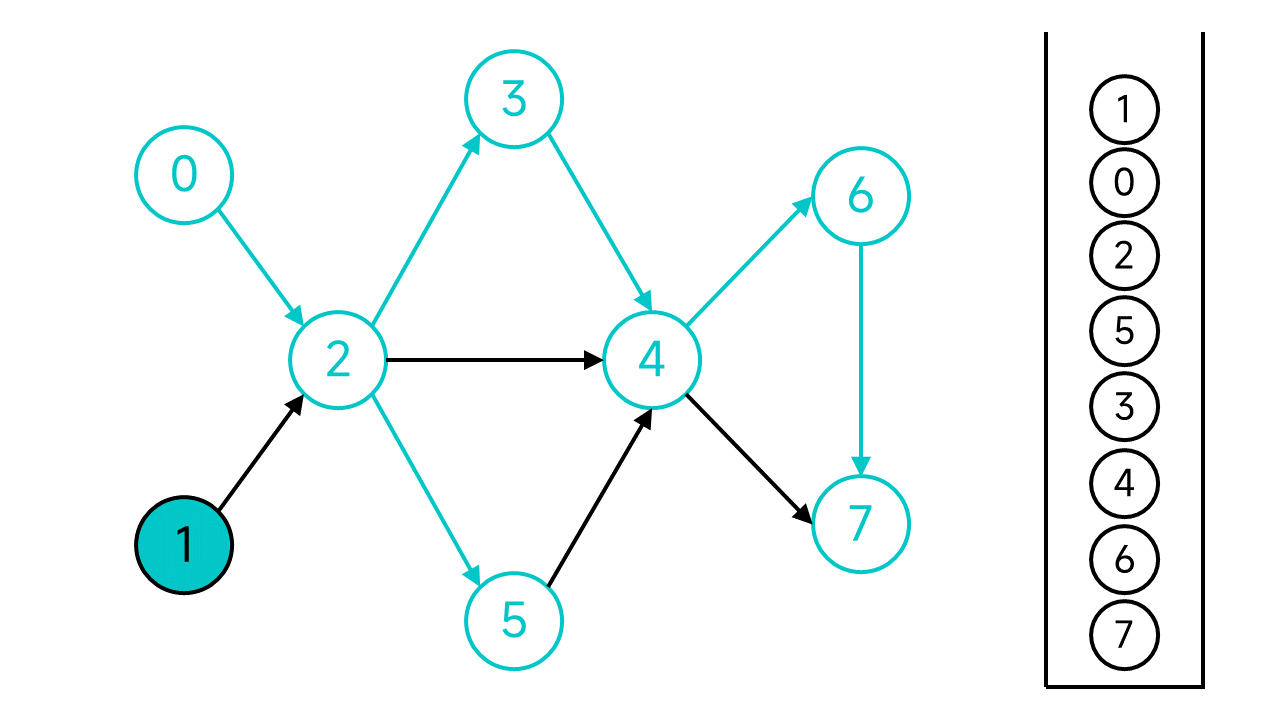
至此,整个DFS过程宣告结束。从栈顶到栈底的节点序列1 0 2 5 3 4 6 7就是整个图的一个拓扑排序序列。
这里同样使用类型别名node_t代表节点序号unsigned long long:
using node_t = unsigned long long;
同样使用邻接表来存储图结构,整个图的定义如下:
class Graph {
unsigned long long n;
vector<vector<node_t>> adj;
protected:
void dfs(node_t cur, vector<bool> &visited, stack<node_t> &nodeStack);
public:
Graph(initializer_list<initializer_list<node_t>> list) : n(list.size()), adj({}) {
for (auto &l : list) {
adj.emplace_back(l);
}
}
vector<node_t> toposortDfs();
};
函数dfs的参数及说明如下:
cur:当前访问的节点。visited:存放各个节点状态的数组,false表示未访问,true表示已访问。初始化为全为false。nodeStack:存放节点的栈。
整个过程如下:
- 首先,我们需要将当前节点的状态设为已访问:
visited[cur] = true;
- 依次检查当前节点的所有邻居的状态:
for (node_t neighbor: adj[cur]) {
// ...
}
- 如果某个节点已访问,则跳过。
if (visited[neighbor]) continue;
- 否则,递归的对该节点进行DFS:
dfs(neighbor, visited, nodeStack);
- 所有邻居检查完后,就将该节点入栈:
nodeStack.push(cur);
整个dfs函数的代码如下:
void Graph::dfs(node_t cur, vector<bool> &visited, stack<node_t> &nodeStack) {
visited[cur] = true;
for (node_t neighbor: adj[cur]) {
if (visited[neighbor]) continue;
dfs(neighbor, visited, nodeStack);
}
nodeStack.push(cur);
}
我们需要初始化3个数据结构:
sort:存放拓扑排序序列的数组。visited:见上文。nodeStack:见上文。
vector<node_t> sort;
vector<bool> visited(n, false);
stack<node_t> nodeStack;
整个过程如下:
- 依次检查每个节点的状态,如果未访问,则从该节点开始进行DFS:
for (node_t node = 0; node < n; ++node) {
if (visited[node]) continue;
dfs(node, visited, nodeStack);
}
- 此时
nodeStack已经存储了整个拓扑排序序列,我们只需要转移到sort数组并返回即可:
while (!nodeStack.empty()) {
sort.push_back(nodeStack.top());
nodeStack.pop();
}
return sort;
整个代码如下:
vector<node_t> Graph::toposortDfs() {
vector<node_t> sort;
vector<bool> visited(n, false);
stack<node_t> nodeStack;
for (node_t node = 0; node < n; ++node) {
if (visited[node]) continue;
dfs(node, visited, nodeStack);
}
while (!nodeStack.empty()) {
sort.push_back(nodeStack.top());
nodeStack.pop();
}
return sort;
}
int main() {
Graph graph{{2},
{2},
{3, 4, 5},
{4},
{6, 7},
{4},
{7},
{}};
auto sort = graph.toposortDfs();
cout << "The topology sort sequence is:\n";
for (const auto &node: sort) {
cout << node << ' ';
}
return 0;
}
The topology sort sequence is:
1 0 2 5 3 4 6 7
复杂度分析
- 时间复杂度:O(n+e),n为节点总数,e为边的总数。其中DFS的时间复杂度为O(n+e)。
- 空间复杂度:O(n)(邻接表的空间复杂度为O(n+e),不计入在内),其中维护
visited数组和nodeStack栈分别需要O(n)的额外空间。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK