

Ceres(四) LocalParameterization
source link: https://charon-cheung.github.io/2022/12/02/SLAM%E5%B7%A5%E5%85%B7/ceres%204%20LocalParameterization%20/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
Ceres(四) LocalParameterization
四元数表示的是一个SO3,四元数有四维即四个自由度,但它表示的含义其实只有三个自由度,这显然是不合理的,所以产生了单位四元数这么一个东西,单位四元数指四元数的四个量的二范数是1,这其实是一个约束,约束了四元数的一个自由度,这样四元数就只剩下三个自由度了,正好符合一个SO3的维数。
这段话没有完全理解: 这里其实是一个 Manifold 变量 over parameterized的问题,即 Manifold 上变量的维度大于其自由度。这会导致 Manifold 上变量各个量之间存在约束,如果直接对这些量求导、优化,那么这就是一个有约束的优化,实现困难。为了解决这个问题,在数学上是对 Manifold 在当前变量值处形成的切空间(Tangent Space)求导,在切空间上优化,最后投影回 Manifold。
在ceres里面,如果使用的是自动求导,然后再结合爬山法,那么每步迭代中都会产生一个四维的迭代的增量delta,这样就仅仅需要将原四元数 “加上” 这个迭代产生的delta就能够得到新的四元数了。这里问题就来了,直接加上以后这个四元数就不再是一个单位四元数了,不符合二范数之和为1。如果每次迭代过后,都将这个四元数进行归一化处理,就会显然很麻烦。
同理,旋转矩阵也是如此。二者都是使用过参数化表示旋转的方式,它们是不支持广义的加法(一般使用符号 ⊞⊞ 表示)。也就是说使用普通的加法就会打破约束:旋转矩阵加旋转矩阵得到的就不再是旋转矩阵,四元数加四元数得到的不是单位四元数。所以我在使用ceres对其进行迭代更新的时候就需要自定义其更新方式了,具体的做法是实现一个参数本地化的子类,需要继承LocalParameterization,它是纯虚类,所以继承的时候要把所有的纯虚函数都实现。
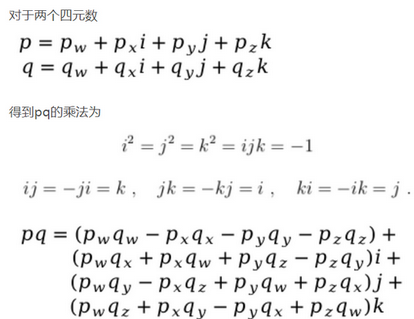
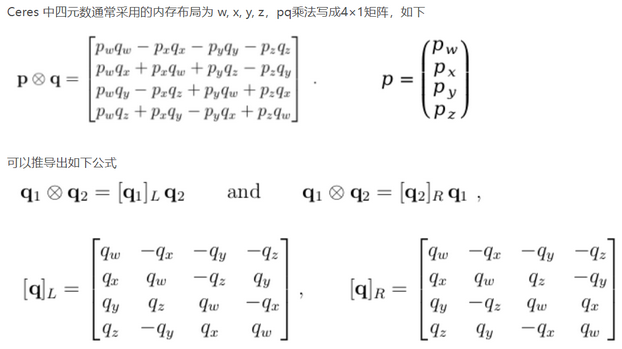
Ceres存储四元数的顺序是(w, x, y, z),Eigen::Quaternion内部内存分布为(x, y, z, w)
class CERES_EXPORT QuaternionParameterization : public LocalParameterization
{
public:
virtual ~QuaternionParameterization() {}
virtual bool Plus(const double* x,
const double* delta,
double* x_plus_delta) const;
virtual bool ComputeJacobian(const double* x,
double* jacobian) const;
// 表示参数的自由度,也就是 Manifold 空间(四元数)是 4 维的
// 即四元数本身的实际维数,如果是旋转矩阵,则为 9
virtual int GlobalSize() const { return 4; }
// 表示迭代增量所在的切空间(tangent space)是 3 维的。即旋转矢量的实际维数
virtual int LocalSize() const { return 3; }
};
对两个Size,我的理解是:四元数本身的维度是 4,但其自由度只有 3,因此迭代量的维度也应该是 3
- Plus()函数
原型: bool Plus(const double* x, const double* delta, double* x_plus_delta)
四元数的更新方法,参数分别为优化前的四元数 x,用旋转矢量表示的增量delta( 而且本来就是半轴角,所以不需要除以2 ),更新后的四元数 x_plus_delta。函数首先将增量由旋转矢量转换为四元数,转换过程就是《视觉SLAM十四讲》的公式(3.19),然后用优化前的x左乘增量,获得x_plus_delta
bool QuaternionParameterization::Plus(const double* x,
const double* delta,
double* x_plus_delta) const
{
/* -------- 将旋转矢量转换为四元数形式-------- */
const double norm_delta =
sqrt(delta[0] * delta[0] + delta[1] * delta[1] + delta[2] * delta[2]);
if (norm_delta > 0.0)
{
// 这里的 除以norm_delta 相当于归一化
const double sin_delta_by_delta = (sin(norm_delta) / norm_delta);
double q_delta[4];
q_delta[0] = cos(norm_delta);
q_delta[1] = sin_delta_by_delta * delta[0];
q_delta[2] = sin_delta_by_delta * delta[1];
q_delta[3] = sin_delta_by_delta * delta[2];
/* --------2.采用四元数乘法更新-------- */
// 注意这个乘法的顺序关乎求雅克比矩阵,具体说明参照 ComputeJacobian
x_plus_delta = q_delta * x;
}
else
{
for (int i = 0; i < 4; ++i)
x_plus_delta[i] = x[i];
}
return true;
}
- ComputeJacobian函数
原型:bool ComputeJacobian(const double* x, double* jacobian)
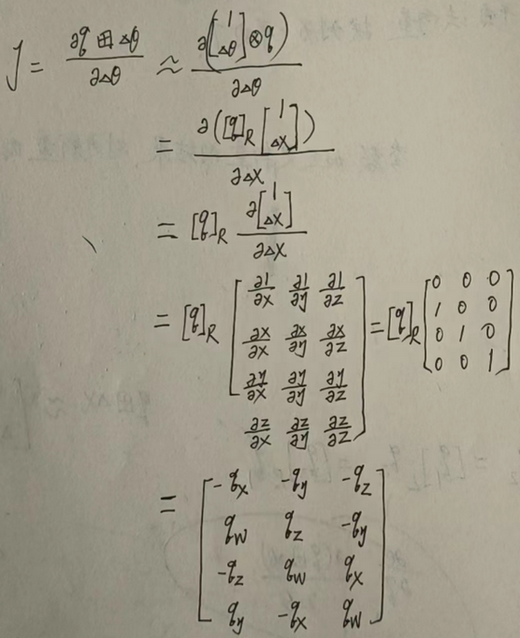
四元数相对于旋转矢量的雅克比矩阵,即 x_plus_delta( 也就是 Plus(x, delta) ) 关于 delta(接近0)的雅克比矩阵。计算该参数加上更新量的结果对更新量的雅可比矩阵
四元数维度为 4,迭代量维度为 3,因此雅可比维度应该是 4x3。也就是 GlobalSize×LocalSizeGlobalSize×LocalSize
如果直接在求观测误差对四元数求雅可比,得到的结果维度和该变量的维度是一致的,也就是说 雅格比同样具有冗余的自由度 ,还是开始就提出的问题,因此还需要对其迭代量进行雅可比求解。数学表示如下
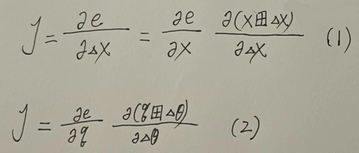
(2)式为四元数上的例子,q为四元数,维度为 4,ΔqΔq为作用在四元数上的更新量,维度为 3
上面两个公式的第一部分是对原始过参数化的优化变量(四元数)的导数,这个很容易求得,直接借助ceres的AutoDiffCostFunction() 计算即可,或者自己计算雅可比矩阵,实现一个costfunction。关键是第二部分。
// x[0] 对应 w
bool QuaternionParameterization::ComputeJacobian(const double* x,
double* jacobian) const
{
jacobian[0] = -x[1]; jacobian[1] = -x[2]; jacobian[2] = -x[3]; // NOLINT
jacobian[3] = x[0]; jacobian[4] = x[3]; jacobian[5] = -x[2]; // NOLINT
jacobian[6] = -x[3]; jacobian[7] = x[0]; jacobian[8] = x[1]; // NOLINT
jacobian[9] = x[2]; jacobian[10] = -x[1]; jacobian[11] = x[0]; // NOLINT
return true;
}
从 Ceres version 2.2.0开始,LocalParameterization interface and associated classes are deprecated. Please use Manifold instead.
参考:LocalParameterization子类说明
Ceres 学习记录(二)
通过Problem::AddResidualBlock()函数,记录输入parameters和residuals的尺寸
AddParameterBlock添加的优化变量并不一定是ceres内部运算时采用的优化变量,例如我们通常会采用四元数+平移也就是SE3作为外部维护的状态,在ceres优化中也被成为global parameter,但通常会对 se3(local parameter)求解jacobian,那么此时我们必须要告诉ceres,求解出se3的优化增量后如何对SE3进行更新,这个就是通过指定参数化方式完成的,即传入LocalParameterization的子类对象,
参数化类中需要实现什么?
定义该参数优化过程中,求解出来的Local parameter对Global parameter进行更新的方法,
virtual bool Plus(const double* x, const double* delta, double* x_plus_delta) const定义
Global parameter对Local parameter的jacobian,virtual bool ComputeJacobian(const double* x, double* jacobian) const,因为ceres优化时,只能设置残差关于李群的jacobian(通过实现ceres::SizedCostFunction子类完成),但我们需要的是残差关于李代数的jacobian,因此通过这个函数传入李群与对应李代数的jacobian,从而实现转换。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK