

软件定义机器人为时尚早?先把身体造好再说
source link: https://www.36kr.com/p/1942740270565762
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

人形机器人“擎天柱”让人失望了?马斯克又在吹牛皮?
“擎天柱虽然整体表现不及预期,但作为特斯拉对外发布的第一代原型机,也表现出了一些很好的性能。”
在腾讯科技和光锥智能联合IP栏目《机器人时代》系列直播第三期上,优必选科技副总裁付春江、山东大学控制科学与工程学院李贻斌教授以及中国机器人网创始人赵勇等三位嘉宾,对特斯拉AI Day上机器人的表现,评价几乎一致。
在结构设计上,“擎天柱”的腿部结构非常紧凑,很少有多余的零部件。另外,腿部和膝盖部分也较为创新的使用了四连杆结构,能够通过改变力臂来增加机器人的活动范围。
令人遗憾的是, “ 擎天柱 ” 并没有在运动控制和芯片上展现出过人的表现,所采用的轨迹规划、全身动力学控制动作模仿,也都是比较常见的算法。
不过,这样的产品设计或许是为了给量产让路。 过去的大部分人形机器人追求的是仿形和动作,但对于特斯拉而言,它的目标很明确,人形机器人的产品定位就是要低成本且实用。“'擎天柱'整体结构和系统已经打通,为将来的量产打好了基础。”优必选科技副总裁付春江表示。
马斯克在发布会上一直强调,尽快量产出“有用的人形机器人”才是特斯拉的目的。
如果要量产,必须有一个刚需的应用场景,那么这个场景最有可能的是什么?
“人形机器人的落地,首先会在半结构化的工厂里实现。”在3位嘉宾看来,半结构化的任务场景要比开放式场景的实现难度要低,因此,工厂会率先成为“擎天柱”落地的第一站。
但人形机器人进厂打工并不是要完成拧螺丝这类的精细活儿。赵勇认为,现阶段的人形机器人在一些车间作业上无法跟专业的SCARA机械臂相比,但基于可以移动并且是双臂作业的特点,人形机器人能够实现中距离的物料搬运以及操作一些柔性化的材料。
不过,目前人形机器人的本体制造还面临着许多问题。“想要研究出来一个外形像人、神态也像人的人形机器人,要解决运动技能、运动平衡问题,还有智能作业问题。”山东大学教授李贻斌认为。
当下,人形机器人的问题主要还是出在技能和智能上。技能考验人形机器人的运动控制能力,而智能则需要人形机器人拥有一个强大的“大脑”。
在技能方面,除了技术顶尖的波士顿动力以外,几乎没有一家公司能够让人形机器人跑起来,运动控制一直是制约着整个行业的一个技术难点。
纵观人形机器人控制发展的三个阶段,第一代以阿西莫为代表,运用简化模型来进行控制;第二代以Altas为代表,基于质心动力学再加上其他运动学的方式;第三代则是刚柔串并的一种硬件结构。现在很多人形机器人呈现出三种方法混合的特点,不过技术的迭代和优化仍然需要时间去进行验证。对此, 付春江表示,在未来,更希望能够看到完全基于网络化的分布式控制方法成为一种趋势,有助于本体的多样化。
在智能化方面,所谓“软件定义一切”,这背后也映射出当下智能化水平愈发重要。 但软件定义一切的前提,是有一个性能足够好、价格足够低、较为完善的硬件平台。 在付春江看来,人形机器人还远远没有达到软件定义的程度。“我们所说的软件定义一切,实际上是在通用人形机器人的基础之上,这个说法才成立。”
种种问题的背后反映的是人形机器人仍然处于早期的发展阶段,不过特斯拉此时入局人形机器人,不仅让大家看到了人形机器人在工厂落地的可能性,同时,也让国内的核心零部件厂商捕捉到了机遇。
作为高自由度的机器人,人形机器人对减速器拥有大量需求,并且减速器的成本在整机成本中占到了不小的比例,达到20%左右。据业内人士推测,“擎天柱”的旋转舵机大概率使用的是谐波减速器,直线舵机则是行星滚珠丝杠,国内很多厂商都可以做。这就意味着,人形机器人产业一旦步入正轨,能够在产业链上下游形成巨大的协同效益,为大规模的量产做准备。
也正如中国机器人网创始人赵勇所言:“擎天柱具有引领性的作用,一旦形成行业风向,对于中国的机器人产业发展也会起到很强的带动效应。”
以下为对话实录:
特斯拉的“擎天柱”能不能打?
光锥智能:马斯克一直在强调,想尽快设计出“有用”的“量产”机器人,各位嘉宾认为“擎天柱”的表现达到预期了吗?
付春江: 一方面,马斯克此前立下的flag其实并没有完全实现,或者说低于预期。因为Dojo芯片、跑动以及手部的抓握能力在这次AI DAY上并没有太多的展现。但另外一方面,“擎天柱”整体的结构和系统现在已经打通,对于未来的量产比较有利。为了实现量产,“擎天柱”的腿部结构非常像德国慕尼黑工业大学的人形机器人劳拉所使用的旋转舵机和直线舵机相混合的一种方式,腿部结构非常紧凑,多余的零部件也较少。
李贻斌: 就我个人而言,特斯拉“擎天柱”的表现不及预期。但作为特斯拉对外发布的第一代原型机,“擎天柱”也表现出了一些很好的性能,比如说结构设计上颇具特色。另外,虽然“擎天柱”在行走上不算稳健,但它上半身所表现的一些动作比较灵活,为后续智能的嵌入和技能的提升奠定了基础。

“ 擎天柱 ” 内部结构
赵勇: “擎天柱”没有达到预期,但产品的发布也带来了一些启示。
首先,特斯拉的目标很明确,就是要发布一款用在工厂里的人形机器人,以往的人形机器人由于受限于技术,几乎没有哪一家公司会在一开始就将机器人布置到工厂里。
其次,把价格打下来也是特斯拉的一贯风格。马斯克宣称要把“擎天柱”的价格打到2万美元的价格,可以说是在意料之外的,因为目前没有人形机器人能够实现量产,成本极高,特斯拉Bot的成本目前大概在十万到十五万美元左右,跟两万美元比起来,有将近七倍的差距。
目前为止,特斯拉发布的“擎天柱”应该是最接近于人的人形机器人,虽然看起来比较粗糙,但我对其最直观的感受就是跟人形更为接近。
光锥智能:基于“量产”和“有用”的定位,擎天柱走的是一种什么样的技术和产品的路线?
付春江: 首先,马斯克产品设计的初衷就是低价量产。在完成基本任务的前提下,人形机器人的设计和研发要尽量配合量产来进行。而波士顿动力和阿西莫的人形机器人,材料和一些相关零部件加起来大概需要一两千万,量产根本无从谈起。
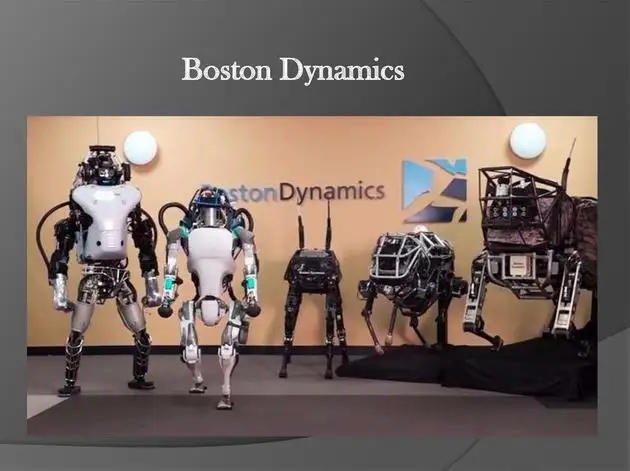
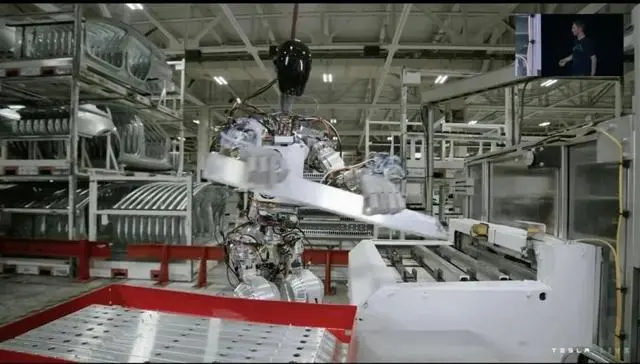
波士顿动力的机器人
其次,从技术路线角度来说,“擎天柱”所采用的轨迹规划、全身动力学控制动作模仿,也都是比较基础的算法,这样就降低了一定的研发成本,还能为未来奠定开发基础。
另外一方面,从研发角度来讲,“擎天柱”借鉴了车企的研发流程,有助于人形机器人在未来实现真正的量产。因此,“擎天柱”所有的硬件设计和开发流程设计都是围绕着量产来进行定位。
李贻斌: 特斯拉的目标很明确,造人形机器人就是要低成本和实用。过去的大部分人形机器人追求的是仿形和动作,而特斯拉追求人形机器人在某种特定场景下的作业能力。“擎天柱”在臂和手的设计上,下了很多功夫,比如说它的一只手有11个自由度,能够很灵活地操纵工具。

“擎天柱”的手部关节
在量产方面,按照马斯克的说法2023年量产,对于特斯拉这样的企业而言不算难事,关键在于量产以后的应用。
赵勇: 从某种程度来讲,这次特斯拉的发布会,对于人形机器人行业起到抛砖引玉的作用。我猜测后续特斯拉可能会开源一些东西,而开源以后对于整个行业的产业链都会产生极大地促进作用。如果有更多的公司参与进来,比如说人形机器人的核心零部件厂商的加入,整合上下游产业链,最终能够达到降本的效果。
光锥智能:人形机器人核心零部件很多,智能化系统也很复杂,特斯拉重点做的是哪几个部分?
付春江: 特斯拉作为一家车企,做人形机器人有很大一部分的技术和零部件可以复用,比如说电动汽车的舵机减速器、散热以及嵌入式系统,都可以复用到机器人上。另外,从智能的角度来说,特斯拉积累了大量数据,还有基于视觉导航框架的神经网络框架,这些积累对于人形机器人而言同样可以复用。
光锥智能:特斯拉有没有针对人形机器人去做核心的定制化研发?
付春江: 我之前比较期待,特斯拉在人形机器人上自研的芯片。众所周知,自研的芯片是可以形成护城河的核心零部件。但可能考虑到功耗和散热的相关设计,“擎天柱”并没有搭载Dojo芯片,而是用了与汽车类似的单颗Soc芯片。
在未来,芯片对于机器人而言是一个杀手锏般的存在,如果与高算力进行相关集成的话,可以达到非常好的效果。
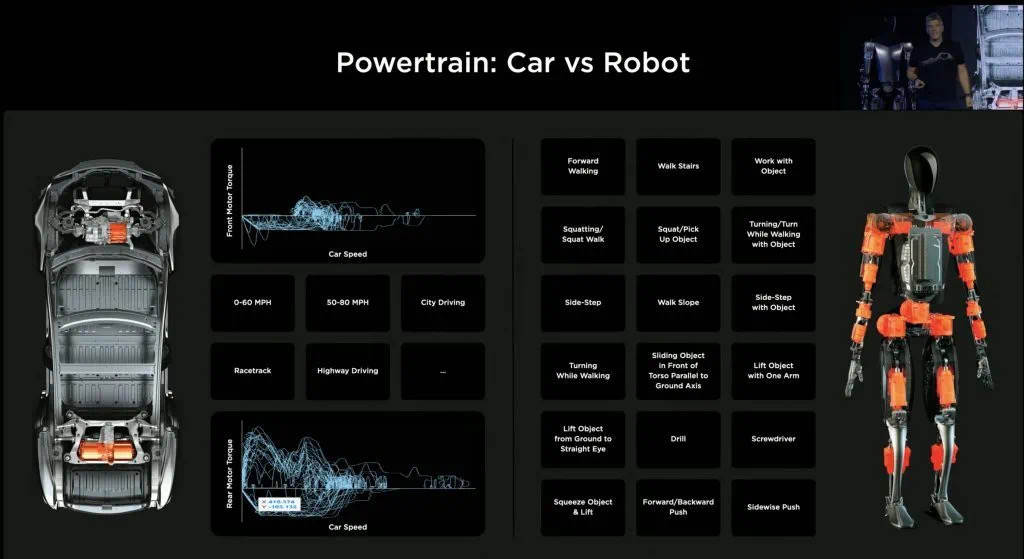
光锥智能:人形机器人与汽车相比,算力的差异在哪?
付春江: 自动驾驶对于算力的消耗相对比较大。比如说自动驾驶比较通用的芯片,算力水平大概在150-250TOPS之间。这种算力如果用在最先进的汽车上,四片可以达到800左右到1000TOPS的算力水平,对于人形机器人而言已经非常高,产生算力冗余。
如果人形机器人所有的数据都在边缘端计算,算力可能不够,但如果只是把对实时性要求比较高的运动控制放在边缘端计算,不用神经网络的算法的话,对算力要求也不会特别高。
所以,在算力的设计上,存在着一定的矛盾。这也是我为什么希望今天在运动控制方面能够看到特斯拉发布一些新的基于神经网络的运动控制方法。这样一来,它的大算力板在未来就有了用武之地。
人形机器人的落地考验?
光锥智能:很多观点都认为软件定义汽车、软件定义机器人,那么在智能化的能力越来越重要的时候,在机器人上,汽车公司会不会超过原先的机器人公司?
李贻斌: 汽车做的事情(如自动驾驶)相对来说比较专用。而对于机器人而言,机器人需要在不同的环境下完成更加复杂的作业。从智能程度来看,肯定是机器人的智能程度要求更高。从现在来看,为什么特斯拉一家车企要做人形机器人,本质上是因为它在自动驾驶上有着长期的积累,而自主驾驶像感知、控制等等可以复用到机器人身上。
人形机器人“擎天柱”
特斯拉更多地是向下做,从智能到本体再到技能。而很多机器人公司现在更多的是从本体开始,再到技能,最后是智能,是一个从下往上的路径。这是两种不同的发展路径,各有优劣。
只是机器人公司在研发实力和经费投入上远不及汽车公司,而且现阶段的机器人公司很难实现盈利,人力和物力都不足。因此,我们希望机器人公司和汽车公司能够共同来研发人形机器人。
赵勇: 汽车公司和人形机器人公司是一个从软到硬和一个从硬到软的区别。特斯拉研发人形机器人的时间不到一年,但它造汽车的时间已经很久了。因此,在研发人形机器人的过程中,它先有了无人驾驶的技术、控制技术,是一个从软件到硬件的过程。
而国内外的很多公司,实际上是从硬到软的一个过程。尤其是国内很多大学在研发早期都是从两条腿开始,两条腿会走路以后再慢慢加手,先从机械本体开始做起,一步步往智能化发展。
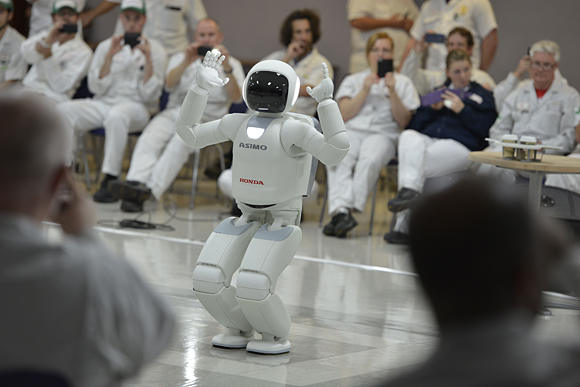
人形机器人阿西莫
个人更倾向于软件层面比较重要,因为我始终有一个观点:脑袋决定口袋,思路决定出路。举个例子,像国内的工业机器人,随着硬件技术的不断完善,正在比肩国际的工业机器人,但即使能够达到国际同等水平,我们的机器人仍然还是落后的。为什么?原因就在于软件落后。
付春江: 整个人形机器人赛道总共涌入了三拨人:人形机器人厂商、车企以及家用电子厂商。在开发的初衷上,机器人厂商是在探索技术高点,看看天花板到底在哪;相比人形机器人厂商,车企的开发整体灵活度不高,基本上都是围绕系统集成然后严格降本的思路进行,而且场景非常具有针对性;家用电子厂商则是通过人形机器人来加强生态,虽然人形机器人可能不赚钱,但人形机器人所连接的AloT可以帮助厂商卖小家电。
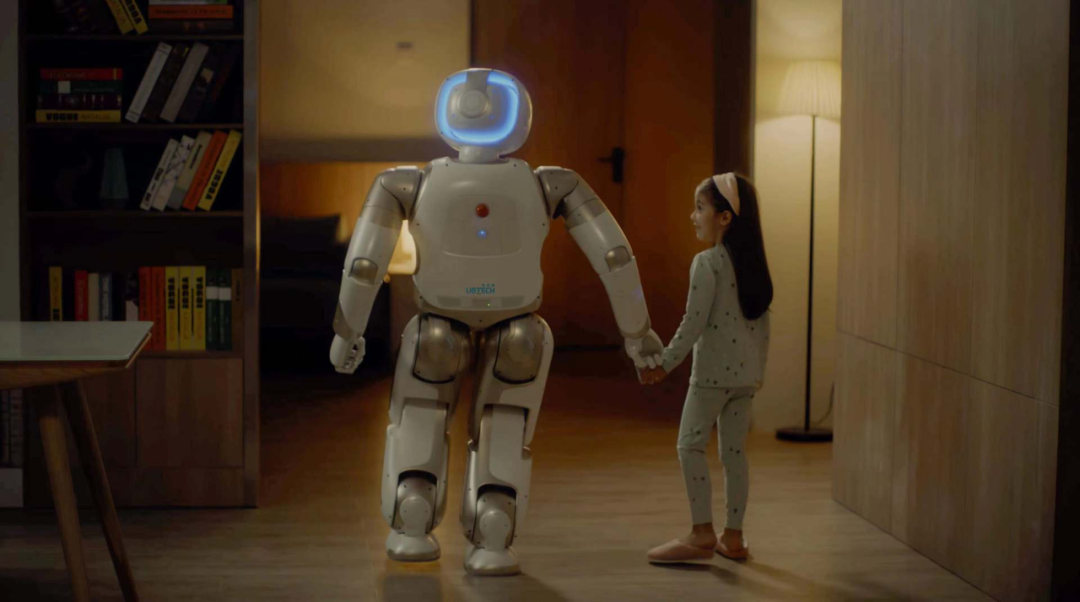
优必选大型人形机器人Walker
我们所说的软件定义一切,实际上是在通用人形机器人的基础之上,这个说法才成立。如果没有平台基础的话,软件定义是不存在的。目前平台尚未标准化,如果说软件定义一切,为时尚早。
光锥智能:所以总结下来,人形机器人或许还是应该先造好身体,保证基本的运动,然后再去考虑提升智能化水平。
付春江: 举一个农业机器人的例子,如果机器人要去摘黄瓜,那么就需要用到专用的夹爪。如果还要去摘西红柿,那么夹爪就需要重新设计。但通用的人形机器人有高自由度的手,就像人手一样,无论是摘黄瓜还是西红柿,都无需再更换夹爪。
其他应用场景也一样,在通用平台的基础之上,形成软件生态,这对未来整个行业的蓬勃发展非常有利。
光锥智能:找到合适的应用场景也是当下人形机器人落地的一个难点,“擎天柱”的应用场景有哪些特别之处?为什么会选择这些场景?
付春江: 特斯拉“擎天柱”所演示的场景,分别对应的是家庭服务、物流配送和工厂装配。现实中,人形机器人的落地,我认为首先会在半结构化的工厂里实现。因为物料、环境等数据都存放在数据库中,只不过是在任务装备上有一定的复杂性。这种半结构化任务场景要比开放式场景动态任务的实现难度要低。下一个场景可能是物流配送,最后是家庭服务。
这里也涉及到两个比较关键的时间节点。第一个时间是2025年,2025年可以实现半结构化场景下机器人的布局,并形成对通用AI及相关场景解决方案的数据反馈,对通用AI有极大的促进作用。第二个时间是从2025年到2030年,通用AI会对通用机器人进行反哺,形成正向反馈,通过反复激励、反复迭代,人形机器人的进化速度就会呈现出指数型的提升。
李贻斌: 首先,“擎天柱”所展示的三种场合对于机器人而言都是刚需的,但并不是人形机器人的刚需,还需要通过后续的开发,针对不同场合的应用来逐渐满足不同场所的作业,让人们从难以接受再到逐渐接受。就像家电的普及过程一样,通过产品的不断完善,当其能够满足人们需求的时候,就成为了必备品。目前,人形机器人最有可能先在工厂里实现落地,形成更高的可靠性以后推向家庭,最后走向野外。
赵勇: 工厂是人形机器人的一个很好的落地场景,对于很多劳动密集型企业而言,存在运用人形机器人补充劳动力的可能性。如果真的像马斯克所说的一台人形机器人的价格不到两万美元,跟买一台进口的工业机器人价格差不多,在此基础上,人形机器人很有可能在工厂里普及。需要明确的是,人形机器人目前的效率没有人高,但机器人能够工作的时间长,以此来弥补低效的问题。按照十几万人民币的成本来测算,如果能在五年内收回成本,我想很多人都会愿意尝试使用人形机器人。
物流场景存在一个问题,即负重的制约。太重的活儿人形机器人干不了,轻巧的活儿又不需要机器人干。我倒是觉得家庭服务场景,在未来能够拓展更多的可能性。以前我们想象的是,扫地有扫地机器人,做饭有做饭机器人,最后一个90平米的房子被20个机器人占了地方,这肯定是不行的。因此,人形机器人在未来应该集合各种功能,成为一个综合性的机器人。家庭服务场景一旦突破之后,市场不可估量。
光锥智能:人形机器人具体在工厂里干什么活儿?
赵勇: 我认为人形机器人可以在中距离范围内搬运一些重量不是很重的小物件。其次,还有一些比较柔性化的材料,比如说线缆、柔软的皮革等等,人形机器人去操作,可能会更合适。
付春江: 首先还是要看人形机器人的相关特点,人形机器人相比于固定的工业机械臂,它可以移动,并且是双臂作业。在工厂里,凡是涉及到中距离移动、双臂操作、对效率要求没有那么高的工作,人形机器人都可以尝试。举一个例子,无论是国产大飞机还是欧洲空客,飞机的舱体都是放在固定位置,由人来进行组装。因为组装环境比较狭窄,工人在组装时的工位姿态比较反人性,所以空客已经在尝试使用人形机器人。

优必选大型人形机器人 Walker
李贻斌: 对于人形机器人而言,作为可以分为五类:一是移动作业,二是双手配合的作业;三是替换掉经常需要换工具的作业;四是环境变化大的作业;第五是需要实施决策的作业,这五类适合人形机器人来做。
光锥智能:大家觉得量产要到什么量级的时候才能达到两万美元的价格呢?
付春江: 从起量角度来看,我认为可以大概分成两到三个阶段。上千台的数量,理论上可以降低20%-30%,大概在十万美元左右;上到一万台以后,价格可以降低50%到五万美元;达到数万台,才有可能降到五万美元以下。
如果是达到了几十万台、上百万台的量级,那个时候整个行业的竞争都会非常激烈,肯定不止特斯拉一家做人形机器人。并且,无论是机器人的构型简化,还是生产制造工艺,都会发生非常大的变革。这种变革发生之后,有可能降低至两到三万美元。

电影《机械公敌》截图
因此我们认为,降本主要分为两步,第一步是起量,第二步则是通过生产工艺的改进来降低成本。
光锥智能:大概什么时候能够到第三个阶段?
付春江: 我认为到2030年左右可以到达第三个阶段。现在制约人形机器人发展的,大多都是动态模糊的不确定性任务。这种任务非常依赖于通用AI,而通用AI同样依赖于人形机器人的体量,两者需要实现一个相互循环、促进的过程。
李贻斌: 成本方面,我不是内行人。但我个人认为,对于特斯拉来说,能够很容易地控制硬件成本,因为特斯拉的制造能力和配套能力非常强,因此,我觉得2万美元的价格,特斯拉可以做到2-3年之后做到。
赵勇: 机器人行业本身就是以量换价,在我看来,万、十万和百万是三个重要的节点,只有达到十万台以上,成本才能大幅度下降。
此外,还需要考虑投入产出比的问题。即便人形机器人卖到一百万美元,如果在一年之内收回,那么市场还是会有人买单。如果人形机器人能够达到一个很好的投入产出比,量级也会迅速起来。
付春江: 未来的人形机器人厂商其实也可以具有一定的互联网思维,比如说硬件不赚钱,而是靠软件服务和相关数据来赚钱。如果要做通用的人形机器人,那么在进行产品定价时,就需要考虑实用性。我们曾经对友商Pepper进行过详细的分析,Pepper的定价在二十万日元,折合人民币一万元左右,一味的低价会对硬件产生了很大的限制,失去了人形机器人的意义。

Pepper人形机器人
还是那句话,如果我们在未来想通过软件服务和数据赚钱,那么就需要软件有能力去定义一切。而软件定义一切的前提,是我们有一个性能足够好、价格足够低、较为完善的硬件平台。
03 人形机器人如何“造得出来”又“造得好”?
光锥智能:现阶段,人形机器人非常火热,科技巨头也在陆续入局。但放眼全球,做人形机器人的公司仍然算不上多,为什么?
付春江: 我觉得主要有两个原因:一是从技术链条来看,人形机器人技术链条很长,增加了研发的难度;二是在市场没有起量的前提下,以市场为导向的公司不会来做人形机器人。
赵勇: 人形机器人前期的研发投入太大,公司行为需要讲回报,如果一直持续进行研发投入却没有回报的话,公司撑不了太长时间。
另外一个问题就是研发难度高。人形机器人的研发涉及到很多跨学科的技术,不是一个小团队能够完成的,而庞大的团队相对来讲成本又更高。
此外,现阶段国内的人形机器人不能做太多创造价值的事情,如果不能创造价值的话,更加谈不上价值回报。
李贻斌: 所谓的高难度,在体能上要求材料的重量轻。有了体能以后,技能需要让人形机器人更加灵活。无论是下肢具有很好的平衡能力,还是上肢具有很好的作业能力,都很考验控制能力。最后是智能,人形机器人需要一个强大的大脑。
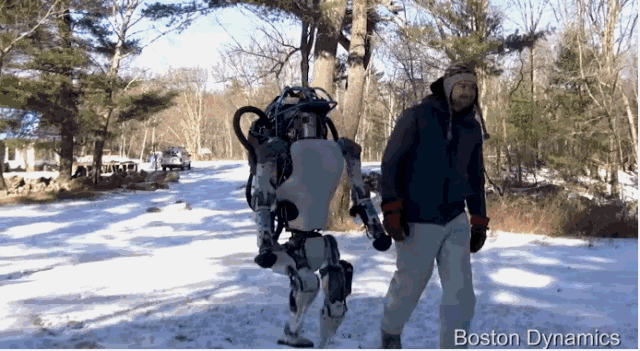
人形机器人Altas
国内最早对人形机器人的研究主要集中在高校,关注的是机器人的运动能力。而这几年,国内有不少企业也开始入局人形机器人,相对来说企业是从应用的角度来进行开发,有利于补充原来高校在研发方向上的不足。
两条路并行,有可能在最后呈现出一个好的结果。我也建议国家能够从过去重点支持企业和研究单位转向以企业为主来开发真正具有实用性的人形机器人。
光锥智能:在运动控制方面,国内外有没有比较确定的技术路线?
付春江: 人形机器人的控制发展经历了三个阶段。第一代以阿西莫为代表,运用简化模型来进行控制;第二代以Altas为代表,基于质心动力学再加上其他运动学的方式;第三代是刚柔串并的一种硬件结构。

人形机器人Altas
现在有很多人形机器人呈现出三种方法混合的特点。其实我个人也比较期待,完全基于网络化的分布式控制方法能够在未来成为一种趋势。这样一来,能够对于本体的多样化发展起到促进作用,比如在未来使用人工肌肉,因为其具有非常高的密度比,我们可以通过复杂化的网络控制人体肌肉。
光锥智能:人形机器人在智能化方面的发展趋势?
付春江: 在智能化方面,优必选科技在过去建立了相对完善的算法矩阵和层次框架,比如说AI语音和AI视觉等,未来的一个发展趋势是多模态融合。另外,不光是语音、视觉导航,在未来,决策与运动都可以用AI的方式来解决。
赵勇:人形机器人对于减速机市场有哪些带动作用和技术影响?
李贻斌: 对于人形机器人而言,性能的提升离不开关节的驱动。从“擎天柱”已知的各项零部件参数来看,我认为国内几家研发关节驱动器的公司,基本上能够满足其需求。但如果是针对减速器市场,现在很多机器人在关节研制时会把减速器集成进去,甚至可能不需要再找专门的减速器,按照自己的要求来设计即可。
付春江: 总体来看,人形机器人作为高自由度的通用机器人,它对减速器的需求非常大,并且减速器在整体的成本里也占了很大一部分。
“擎天柱”虽然没有公开相关减速器的细节,但从视频上看,“擎天柱”的旋转舵机大概率使用的是谐波减速器,直线舵机则是行星滚珠丝杠,国内的很多厂商也能做。什么时候特斯拉愿意把供应链放到中国来,我们需要密切关注相关的时间点。
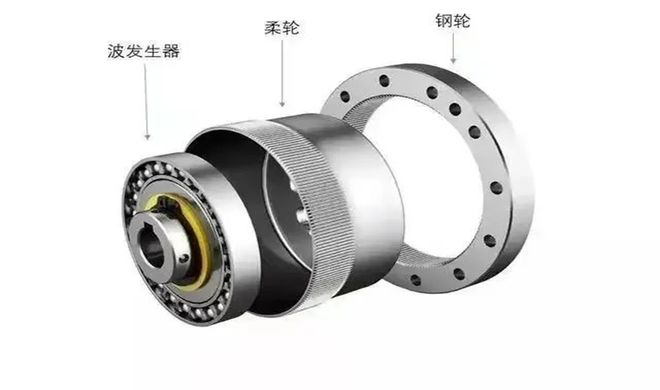
谐波减速器
光锥智能:放眼全球,哪些国家在机器人的核心零部件上比较具有优势?
赵勇: 无论是电机还是减速机,德国和日本都比较强。当然,中国现在从规模上来讲,也正在追赶。
这次“擎天柱”的发布具有一定的引领性作用,一旦形成行业风向,对于中国的机器人产业的发展也会起到很强的带动效应。我也非常期待能够看到中国供应链的介入,一方面能够实现机器人降本的需求,同时也能提升国内的技术水平和制造水平。
光锥智能:现在很多机器人的核心零部件都面临着被国外“卡脖子”的问题,大家如何看待这样的发展现状?
李贻斌: 从机器人本体上来说,被“卡脖子”的可能性不大,核心还是在于芯片的问题。基于人工智能的、人形机器人专用的芯片可能还需要投入力量来进行研发。
付春江: 除了大算力板以外,美国现在14纳米以下的算力板,已经对我国进行了相关的制裁。另外,大家还需要注意模拟芯片,因为生产模拟芯片与生产数字芯片不同,需要非常深厚的积累和经验,因此目前也是处于被“卡脖子”的状态。
光锥智能:在人形机器人的能源动力上,现在有没有一些比较主流的方向?未来有可能会出现哪些有意思的方向?
李贻斌: 大部分人形机器人用的都是锂电池,现在可能研发出了一些采用氢动力的电池,但在能源动力上,我们追求的一直都是重量小出力大,锂电池相对来说具有比较高的安全性,技术成熟度也更高。
氢动力的发电效率可能会高,但氢能的缺点也在于其提取的成本较高,而且高度易燃,具有一定的危险性。
综合来考虑,如何将锂电池和氢动力进行混合型的开发,可能今后也需要大家共同努力来进行研究。
付春江: 我们知道,如果想要机器人的工作时间变长,主要有三点:整体电池容量要大;电池能量密度高;整机运动控制算法的优化。整机运动控制算法的相关优化,其实也非常重要。比如说美国SRI的DURUS,通过整机运动控制的优化,达到更加仿人的行走固态,它用一般的电池就能走一整天。
以“擎天柱”为例,因为它是原型机,所以很多运动控制、结构都没有彻底地优化和迭代,我相信它的电池有能力支持它来完成更长时间的工作。
赵勇: 在能量获取方面,一个是电池容量要做大,另外,我觉得还有很多其他的供能方式。比如说随时随地可以进行无线充电的方式,这样的话也不会耽误机器人的正常作业,尤其是在工厂或者小范围的环境里,目前来讲也有实现的可能。
光锥智能:阻碍人形机器人更像人的,有哪些核心的技术难点还没有突破?有没有相关的布局可以解决这些问题?
李贻斌: 现在真正想要研究出来一个外形像人、神态也像人的人形机器人,要解决运动技能问题,运动平衡问题,还有智能作业问题。包括结构的设计问题、核心零部件的研究与制造、基于动力学的控制或者是基于强化学习的一些控制方法等等,这些都需要我们综合去考虑。实际上,真正要设计出类人的大脑,还要结合类人的形态来执行类人的作业,整个过程非常复杂的。因此,我们的路可能还很长,十年二十年,甚至需要更长的时间。
光锥智能:学术界和产业界需要怎么样结合,才能让人形机器人产业走得更快?
付春江: 从公司的角度来看,与高校科研所的合作,我们更倾向于先发掘具有实验室样品的相关技术,再去考虑技术的具体落地问题。在落地的过程中需要与高校、科研院所以及国家相互配合来解决问题。另外,我们公司也会回馈社会,比如说给高校提供稳定可靠的、工程化的相关平台,形成彼此之间正向的循环。
李贻斌: 作为高校,我们更偏向于基础研究,企业则更关注工程研究和应用。如何将二者有机结合,打造出一个良好的产业结构,这个问题可能需要国家来进一步思考,仅仅凭一家企业或者几家研究单位都无法完成。
本文来自微信公众号 “光锥智能”(ID:guangzhui-tech),整理:卢滢西,36氪经授权发布。
</div
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK