

机器人避障规划算法(五)避障算法
source link: https://mronne.github.io/2020/03/27/%E6%9C%BA%E5%99%A8%E4%BA%BA%E8%B7%AF%E5%BE%84%E8%A7%84%E5%88%92%E7%AE%97%E6%B3%95-%E4%BA%94-%E9%81%BF%E9%9A%9C%E7%AE%97%E6%B3%95.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

-
根据获得的实时传感器测量信息,调整路径,避免发生碰撞
-
- Bug算法
- 人工势场法
- 向量场直方图法
- 动态窗口法
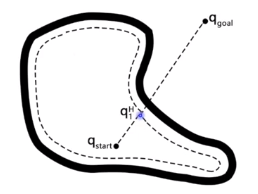
Bug算法
让机器人朝着目标前进,当路径上出现障碍时,让机器人绕着障碍物的轮廓移动,然后绕离它,继续驶向目标
- 机器人沿着障碍物做完整绕行,找出障碍物上最靠近目标点的点,为离开点。再次绕行到该点,从该点离开障碍物。沿直线向目标点移动
- 如果离开点到目标的直线与当前障碍物相交,则不存在到达目标的路径
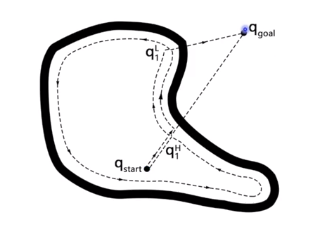
- 优点:可确保机器人到达任意目标
- 缺点:计算效率低
- 根据起始点和终止点定义路径L
- 当遇到障碍物时,进入障碍物轮廓跟踪模式
- 当到达L上一个接近目标点的位置时,如果该位置比碰到障碍物时的位置更接近目标点,则继续沿着L移向目标点,否则继续绕行
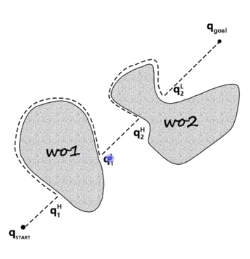
- 如果在跟踪模式下再次到达进入障碍物轮廓跟踪模式的点,则可以判断不存在到达目标点的路径
- 优点:具有较短的移动路径
- 贪婪搜索,某些情况下移动低效
向量势直方图(VFH)
- 基本思想:根据环境详细栅格地图构建机器人坐标系下障碍物概率直方图,根据概率直方图评估最优运动方向
以机器人当前位置为中心,构建栅格地图(Active Window),对Active Window中的单元,根据实时传感器的检测信息建立障碍物的可信度概率,评估机器人每个方向上障碍物的密度,构成直方图,选择小于threshold的通道进行规划。
- 构建并维护机器人周围环境的局部栅格地图
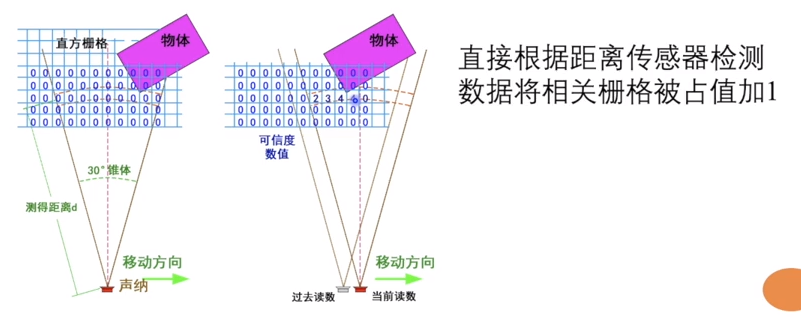
- 为每个栅格计算其障碍物向量,距离机器人越近向量越大
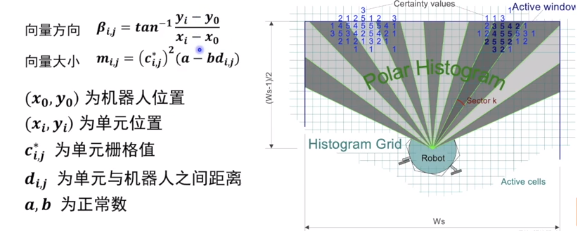
- 转换为极坐标下的障碍物概率直方图
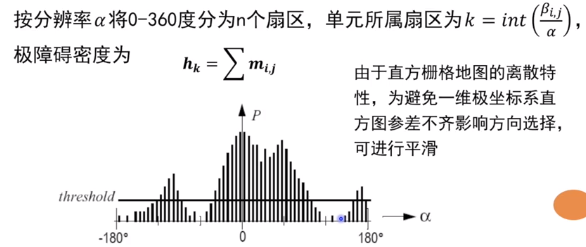
- 根据直方图,识别所有可以让机器人通过的通道。对每个通道计算成本,选择最低成本通道,得到导航方向。
成本计算:
G=a⋅targetdirection+b⋅ wheel orientation + c⋅ previous_direction(1)(1)G=a⋅targetdirection+b⋅ wheel orientation + c⋅ previous_direction
- target direction:路径与目标之间的对齐量
- wheel orientation:新方向和当前机器人方向的差异量 避免机器人大幅转弯
- Previous direction:原来选择方向和新方向之间的差异量 避免机器人扭来扭去
- 通过a,b,c进行权重调节
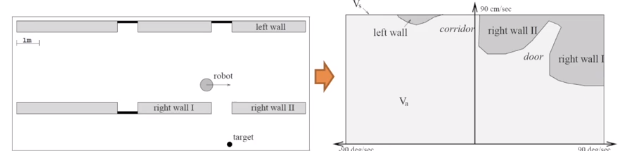
动态窗口法(DWA)
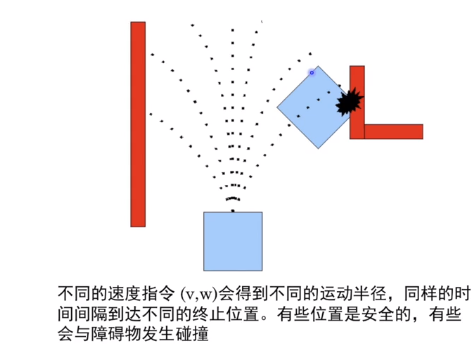
- 基本思想:在速度空间中搜索适当的平移速度和旋转速度指令(v,w)
- 从几何空间搜索转化为速度空间搜索
- 基于速度控制运动模型,构建可行的速度空间
-
考虑到机器人在运动过程中最大加速度的约束,在当前速度配置处以固定的小时间间隔开一个速度窗口空间
-
结合机器人速度约束,获得可行的速度空间
-
在可行速度空间中选择最优的速度控制指令
- 存在问题
- 根据单步信息数据计算期望速度,在评估选择速度时不考虑速度和路径平滑,容易导致机器人运动存在震动和轨迹扭动问题
- 参数较多,难以适应各自情况
Recommend
-
6
作为一个数码科技产品的视频博主,我的日常工作就是体验产品、拍摄产品、分享视频,但是......拍摄机位和拍摄对象难免过于单一。航拍是我一直非常向往的拍摄手段,而且无人机产品已经火了两三年的时间,各路“野生航拍大神”不断涌现,试问哪个男孩子不渴望拥有一...
-
6
大疆DJI Mini 3 Pro无人机曝光:配备多个避障传感器,电池更大 新酷产品第一时间免费...
-
4
为什么说石头G10S是值得一看的扫拖机器人?在扫地机器人领域,石头科技成为近几年风头正盛的国产品牌,凭借着适中价格下的清洁体验、避障性能,短时间内就塑造出了被用户和媒体普遍认可的产品形象。扫地机器人进入集尘自清洁、扫拖一体等功能的“军备...
-
4
A* 算法是在形成的路径连通图上寻找最佳路径。在连通图上进行路径搜索有以下几种算法: 广度优先搜索(Breadth First Search):在所有方向上均匀探索,适用于地图所有代价都一致的场景。可覆盖地图所有区域,但搜索速度较慢。 Dijkstra’s...
-
2
RRT(Rapid-Exploring Random Tree) RRT即通过扩张树的方式寻找一条可行路径 连通图采用树的形式,在空间中随机采样、连接树中最近节点的方式拓展树 考虑机器人的运动执行能力 通过树结构可直接回溯得到路径
-
10
机器人路径规划算法(八)平面轨迹规划算法 在平面上移动时,机器人有三个状态量(x,y,θ)(x,y,θ) 理论上,应该做三维轨迹规划(x(t),y(t),θ(t))(x(t),y(t),θ(t)) 实际上,只需要做二维轨迹规...
-
3
大疆发布全新DJI Mavic 3M航测无人机:全向避障、15 公里图传距离等亮点 zhangli 2022年11月23日 15:47 原标题:大疆发布全新 DJI M...
-
5
【路径规划-PRM路径规划】基于RRT算法避障路径规划附matlab代码.zip-行业报告文档类资源-CSDN文库 上传资源 快速赚钱 06 Halcon 点云平面度测量.zip被k**ei下载, 赚了33.6元
-
7
极米H6 4K版投影仪发布 支持全自动智能避障 zhangli 2023年02月20日 15:59 原标题:极米 H6 4K 版投影仪发布:支持无损缩放光学变焦...
-
5
避障之后,local planner接收不到新的global plan避障之后,local planner接收不到新的global plan 2023-08-15|
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK