

802.11协议精读36:再论HCCA
source link: https://zhuanlan.zhihu.com/p/397400566
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

802.11协议精读36:再论HCCA
前面写过一次HCCA《802.11协议精读28:802.11e(EDCA/HCCA)》,不过现在看来有点划水,所以把HCCA几个特质的点在写一下。本文的理解要基于之前PCF《802.11协议精读4:PCF工作模式》,Addmission Control《802.11协议精读27:再谈802.11e的优先级(Admission Control)》两篇文章基础上,并且需要对802.11的接入机理有一定理解更合适一些。另外,为了阅读的简单,这里概括一下就是HCCA通过设置CAP这种方式,将原始只能够工作在CFP时间范围内的PCF给搬到CFP以外的时间点来用,这样就可以提供QoS属性了。再简单点而言,就是AP根据业务的需求,在特定的时间点上开辟一个轮询服务时间CAP,然后在里面跑轮询。这样差不多就是HCCA的核心特点。下面我们还是根据HCCA具体跑的需求大致分别说一下几个细节点:
HCCA的TS
HCCA和EDCA不同,EDCA直接是定义了默认的4种流量类型(称为TC)可以直接上的。但是HCCA没有,需要用TSpec进行定义。这里需要参考之前写的《802.11协议精读27:再谈802.11e的优先级(Admission Control)》中关于TSpec和ADDTS的流程,对于需要保护的QoS流量进行定义。
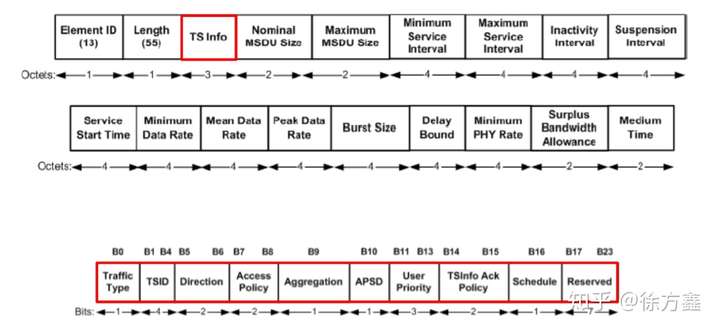
比如上图中所显示的TS Info字段,其中就显示了我们可以定义什么样的流量属性,比如传输的平均速率,峰值速率,Delay上限等等。根据流量的属性,中心控制端HC才可以去计算服务时间的分配和优先级的分配,以保证可以提供QoS的服务。
其实这里还有一个细节,就是TS Info的字段实际上包含的流量定义的内容,既可以用在HCCA上,也可以用在EDCA上面,所以我们可以看TID的定义。
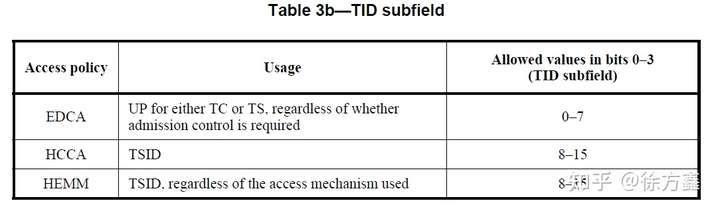
其中还有一个特性就是HEMM (HCCA and EDCA Mixed Mode),实际上就是该TS可以同时工作在HCCA和EDCA模式下面。其实这里也对应到上面的TS_Info,其中包含的属性是通用的。
HCCA由于是依赖流量特性的,所以想要使用它,就需要进行ADDTS的流程,然后做Admission Control看资源够不够,如果够的话,那么才可以执行HCCA。
CAP和CFP
从我理解的角度来看,HCCA在接入具体工作机制上,其实和PCF是基本一致的,我们简单理解就是提供了QoS属性的PCF。那么传统PCF的问题是啥米呢?主要是PCF只能够工作在CFP时间范围内,这就会限制了工作场景,比如一些延迟敏感的业务,那么即使不在CFP时间范围内,也需要为其提供“PCF”的接入服务。所以在HCCA中就相对于CFP提出了一个新的概念,就是CAP时间(Controlled access phases),这里的phase实际上可以理解成一个时间段。
根据以上描述,实际上我们就可以将HCCA机制基本理解成,一个可以在特定时间点(根据QoS流量所需要的周期所定义的时间点),开辟出来的一个轮询服务时间CAP。在该CAP时间范围内,可以提供类似PCF的轮询接入方式。同时,由于是可以在CFP时间点以外开辟CAP时间,所以HCCA既可以用在无竞争的CFP时间,也可以用于基于竞争的CP时间。
具体可以参考这张图
在这张图空白的就是CAP时间,我们可以明显的看到CAP时间既可以放在CFP时间范围内,也可以放在CP时间范围内,而EDCA只能够放在CP时间范围内。另外,如果CAP是在CFP时间范围内,那么直接整个CFP里面就可以直接跑HCCA了,把PCF给替代了。这里图上在一个CFP里面包含多个CAP实际上是针对不同流量而言的,也就是这里初始的CFP时间内有三个CAP时间,实际就可以理解成3种TS流量。
根据上面描述,个人感觉HCCA的核心特点已经阐明了,下面主要是三个细节。
- 1)关于如何提供QoS服务的,也就是CAP这个时间片要怎么放,能够提供QoS功能?
- 2)CAP时间片如何开启?
- 3)在一个CAP时间片内的工作机理是什么?
所以下面其实就是围绕着这三个问题进行阐述了。
Simple Scheduler
HCCA里面是根据Simple Scheduler机制来计算给流量提供QoS服务的,这里需要注意的时,QoS一般都是面向流量进行保障的,节点可以算是流量里面的一个属性。
Simple Scheduler的核心工作就是根据定义的TS流量特征,来计算每间隔多少时间生成一个CAP轮询时间片(也就是CAP周期),以及该CAP时间片设置的大小应该是多少。
这里CAP的周期我们可以对应TS的Element里面(也就是本文的第一张图),关注比如Minimum Service Interval,Maximum Service Interval之类的参数,这几个都是流量本身所需要的服务间隔的参数。那么HC,可以按照最大,最小,或者平均的方式来计算CAP的周期,从而在对应的时间点去开辟CAP时间。
那么CAP时间片设置的大小,这个主要跟三个部分有关,1)数据包个数,2)单个数据包的物理层传输时间(其实包含数据包大小,以及物理层传输速率),3)用于接入过程的overhead时间,比如调度所用的开销。那么根据TS的Element以及TS Info,比如Norminal MSDU Size,Maximum MSDU Size,Minimum Data Rate等,这些参数综合计算出一个合适的CAP时间大小。
所以实际上在协议中,给出了TS这么多的参数,但是并没有规定一个具体的算法,如何应用这些参数来设置CAP和CAP时间片大小。所以很长一段时间内,其实包含当下(其实当下就是基于机器学习的方法做),都还有研究继续关注这一块,换言之根据流量参数,来计算如何设置CAP时间的。
CAP时间片开启
简单回顾下PCF时间是如何开启的,参考之前PCF的文章《802.11协议精读4:PCF工作模式》。
PCF的时间开启实际上是将Beacon帧作为开启帧,然后通过数据帧头部的Duration,以及Beacon中的CF Parameter Element,这两个参数所提供了机制,同时对Beacon之后的一段信道时间进行保护,从而确立出一个CFP时间。这里双重保护的设置机制,我直接复制之前写的了,如下:
- 利用数据帧的MAC头部中的Duration字段,设置CFPMaxDuration。标准的Duartion字段共有16个字节[0:15],其中倒数2个字节,即[14:15]是标志位,且其存放方式应该是属于小端模式的,即后面的是高位,前面的是低位。如果是CFP设置NAV时,对应第14位置0,第15位置1,其余各位都是0。故解析出来,那么NAV的时间即设置为2^15=32768 microsecond。其对应结构如下图:
- 除了利用MAC头部的Duration字段,在CFP对应的beacon帧中,还有一个CF Parameter Set字段。利用该字段中的CFP MaxDuration,也同样设置该参数。在802.11中设置两次CFPMaxDuration参数的原因在于,是在于避免无法识别CF Parameter Set字段的节点,只要其能识别标准MAC头部的Duration字段,那么其也会被置为NAV状态,从而无法争夺信道的使用权。
其实当时做双重保护的目的其实估计是为了稳当一些。
但是现在CAP和CFP时间有一个很大的区别,也就是CAP不一定是追在Beacon之后了。CAP其实我们可以当做这个时间片在任意一点都可以出现。所以现在CAP的开启方式实际上就是完全依赖Duration来实现了,这种方式其实越往后面的802.11协议应用越多。
CAP的开启帧其实和TXOP的开启帧是类似的,可以是RTS/CTS握手,或者单个CTS,或者直接跑QoS-Data都行,主要是利用其中的Duration字段将信道保护起来。但是和TXOP不同的点在于,该CAP开启帧是不跑backoff的,简单点而言我们也可以理解成不竞争。其接入机制和Beacon帧本质是一样的,即等待PIFS时间,然后直接进行发送(即设置CWmin=CWmax=0)。
所以,CAP时间其实就是一个节点在特定时间段,由HC直接开启的一段轮询时间片。其实这里是HCCA提供QoS的原理所在,但是也是HCCA没有被广泛采用的核心原因所在。
HCCA没有被广泛采用的原因和PCF类似,最大的缺点还是在OBSS模式下。由于这两者的接入都是一下子开辟一个较为大段的时间片使用,而且这个时间片还是通过直接抢占的方式来获得,所以其冲突概率还是很大的。如果是PCF的话,由于beacon是没有握手机制的,所以如果beacon发生冲突,那么直接损失最大就是一个CFP周期。到HCCA里面,虽然可以通过RTS/CTS握手,来减少直接冲突造成的损失,但是不同BSS的Admission Control实际上是独立的,所以很有可能分配的CAP周期就直接撞,那么照样是大周期的冲突,造成利用率低下。这些问题造成了HCCA和PCF一样,到现在而言,应用的实际很少。
CAP时间内的轮询TXOP
在接入时间片内,HCCA和PCF的不同就是在于传输帧的type不同,HCCA里面我们可以认为都是QoS+的类型,具体到帧结构中,就是MAC Header多了一个QoS Control的字段。
那么合理的应用该字段,就可以将原来的PCF中的“乒乓”轮询的过程,改成Trigger,多帧反馈的过程。也就是这里所谓的轮询TXOP。就如同前面写的,在传统的PCF中,轮询节点是采用CF-Poll帧,该帧每一次只可以轮询一个数据。在HCCA中,发送的是QoS(+)CF-Poll的帧,该帧可以直接起始一个TXOP时间。
至于Trigger多帧的流程,其本质实际上还是一个TXOP传输的特性,除了HCCA,在U-APSD里面也同样采用,所以这一点另外再单独写一下吧。
另外还有一点细节发现的就是,在协议中把这个时间片内的传输称为HCF-Sequence。协议中有多种类型的HCF-Sequence,这里记录下这种发送组播广播case下的,主要是其中特意强调了一个PIFS。
在Cambridge那本书里面,其实特意简单讨论了下关于CAP接入时间片内,帧间间隔的问题。其本质和CFP时间内帧间间隔是一致的。
这一块的主要目的是HC,或者说AP要把握住整个信道的接入权限。在连续传输中,帧间的最小间隔是SIFS,比如说连续发送两个帧(目前没有讨论到802.11n,到n里面最小是RIFS),或者发送一个帧,等待对方的反馈。这个间隔都是SIFS。那么如果HC发送了一个数据,需要下面反馈,那么等待SIFS时间。但是如果对方没有反馈呢,在SIFS时间之后,HC还会再继续监听一个Slot,那么总时长就变成了PIFS。如果这个时间内还没有人反馈,那么HC就继续使用信道继续后面的传输了。
那么对应到上面HCF-Sequence中特意截出来这张图而言,其实个人感觉这句话也比较难写,合适点的意思应该是把+group和+broadcast这两个设置成可选项,而不是必选项。因为组播广播是没有直接的反馈的,那么实际上SIFS时间才对,只有在可能需要等待下面反馈的时候,才会需要最长等待PIFS时间。所以这里就当一个细节记笔记了。
以上就把HCCA的一些细节特点给补充了一下。以上叙述中,如果有不清楚,或者存在有错误的地方,还请见谅。
本文为原创文章,如需转载须注明出处和原文链接。

欢迎大家关注我们的微信公众号:无线技术大讲堂,请搜索公众号(must_wireless)。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK