

技术分享 | 如本科技 3D 可视化工具 Vis 开源
source link: https://zhuanlan.zhihu.com/p/392841313
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
技术分享 | 如本科技 3D 可视化工具 Vis 开源

导读 3D 可视化工具 Vis 开源
对于 3D 视觉或者机器人算法开发者而言,一款好用的 3D 可视化工具可以大幅提高算法开发和调试效率。基于此目的,如本科技在 2018 年成立之初,就开发了一款交互式异步 3D 可视化工具 Vis 。
该工具被广泛应用于如本科技内部 3D 视觉与机器人算法的开发与调试中,其跨平台与异步交互的特点和简洁的接口,为我们日常的开发和调试节省了大量时间。
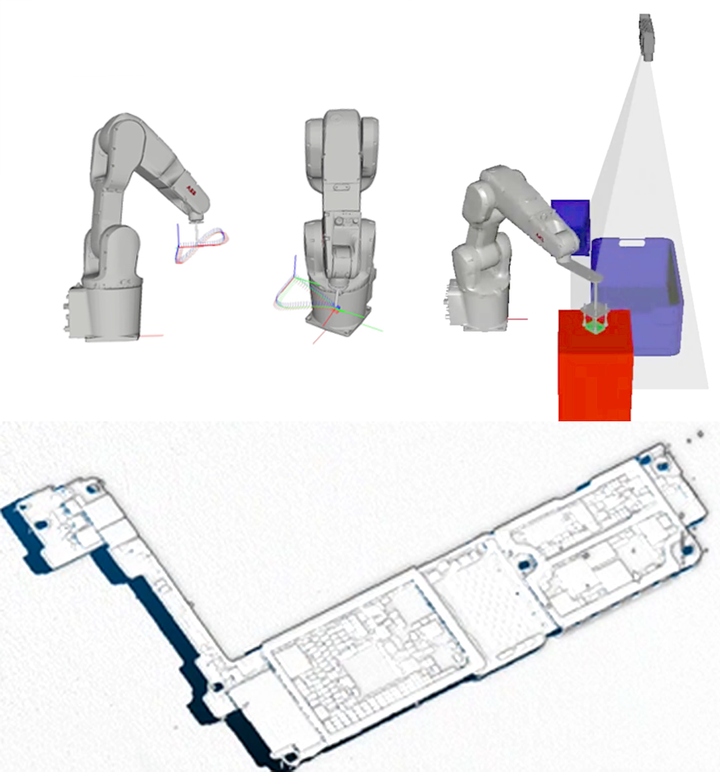 使用 Vis 调试视觉和机器人算法
使用 Vis 调试视觉和机器人算法如本科技本次将 Vis 开源出来,主要是希望对越来越多进入到 3D 视觉和机器人领域的开发者能够有所帮助,同时也希望能够有更多人来使用和改善 Vis 。
Vis 开源库链接
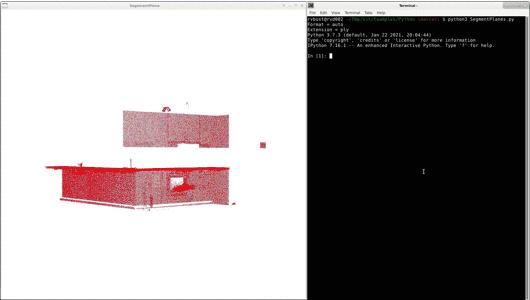
01 操作演示
在调试 3D 视觉算法的时候,我们可以一边在 terminal 内输入命令,一边在 Vis 中查看具体的检测效果,并绘制辅助图形确认识别效果。
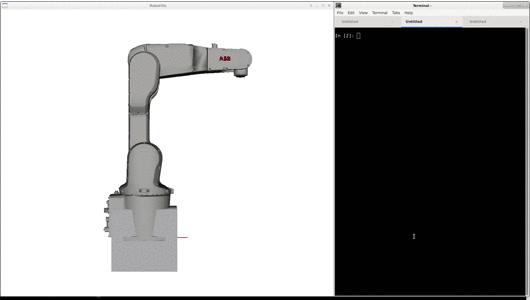
在调试机器人算法的时候,可以一边修改 Vis 中的物体状态,一边在 terminal 内获取和修改环境中物体信息。
02 功能介绍
Vis 拥有一些非常实用的功能,如窗口属性设置、基本几何体绘制、3D 模型导入、交互操作等。这些功能让开发者可以很方便地通过 Vis 对算法过程、结果进行可视化展示,并通过便捷的交互方式对算法进行调试。
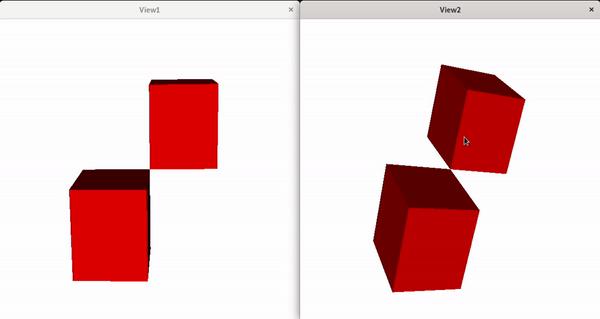
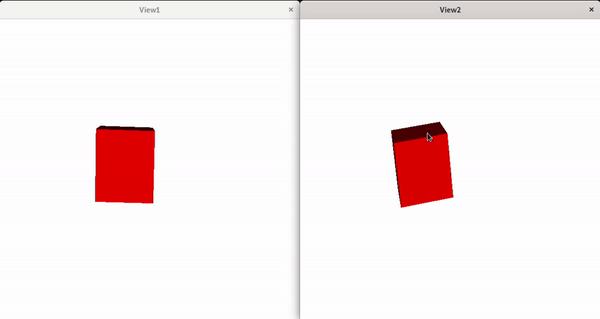
- 窗口属性设置
除了对显示窗口的长宽等属性进行设置外,Vis 也支持同时开启多个视窗,并选择是否共享不同视窗的场景。
- 几何体绘制
Vis 还支持多种基本几何体的绘制,将几何体参数传入相应接口,即可在 Vis 中得到相应的 3D 模型。
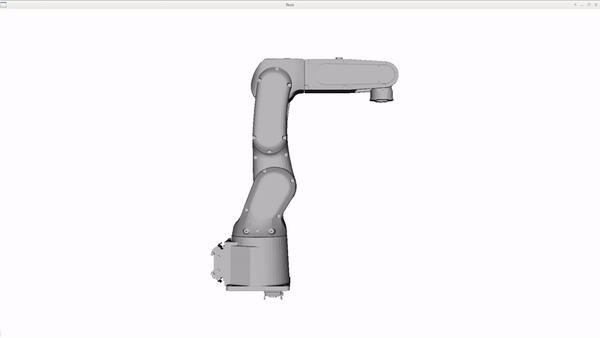
一些 Vis 支持的几何体种类- 3D 模型导入
为了显示机器人等物体模型,Vis 也支持常见的3D文件格式,如stl、dae、3ds等。Vis 可以直接将这些模型文件加载到 3D 环境中。
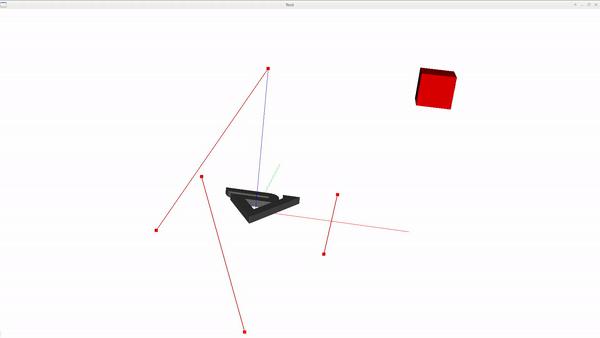
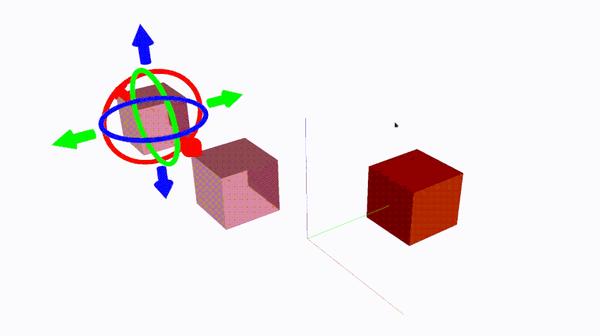
- 交互操作
为了方便调试,Vis 提供了多种点选和交互模型。
03 关于开源协议
为了方便更多人使用 Vis,我们采用了非常开放的 MIT 协议,用户可以自由地使用 Vis 相关的所有代码。我们期待更多开发者能够加入 Vis 的使用与维护,并提供宝贵的使用意见。

Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK