

大疆 N3 飞控 - 参考资料
source link: https://wiki-power.com/%E5%A4%A7%E7%96%86N3%E9%A3%9E%E6%8E%A7-%E5%8F%82%E8%80%83%E8%B5%84%E6%96%99
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

大疆 N3 飞控 - 参考资料
资料及软件下载#
基础知识#
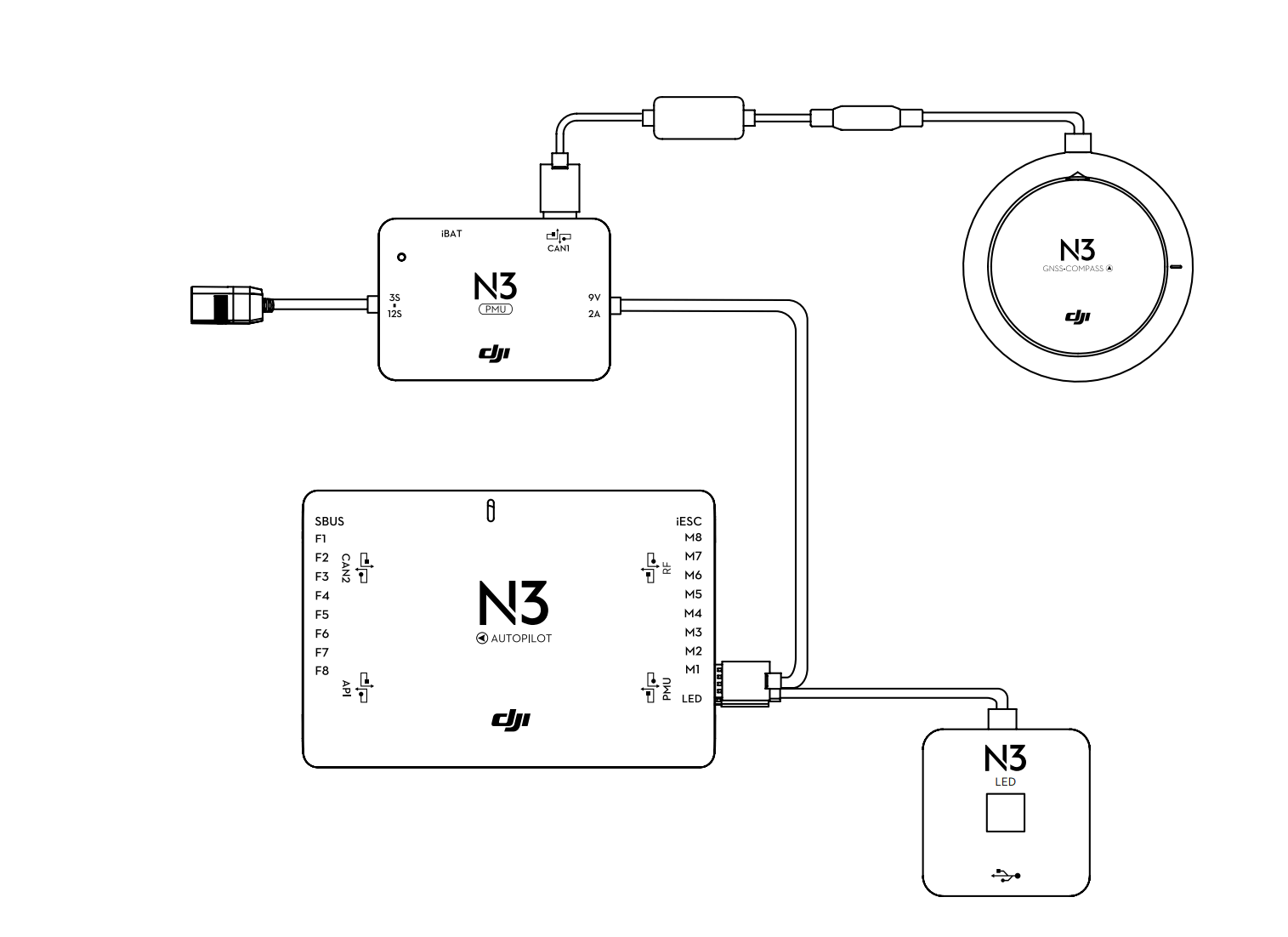
硬件组成:
- 主控器(双 IMU、数据记录仪和气压计),其中 CAN1 连接 GNSS-Compass 模块和 DJI 设备,CAN2 连接 SDK 设备;M1 - M8 连接飞行器电调,且可通过 iESC 端口与 DJI 智能电调通信。
- GNSS-Compass 模块,含 GPS / GLONASS 双模接收机和指南针。
- 电源管理模块(PMU)。
- LED 模块。
飞行模式:
- P:定位模式,使用 GPS 模块或视觉定位系统以实现飞行器精确悬停。
- A:姿态模式,不使用 GNSS 与视觉定位系统,仅提供姿态增稳,若 GPS 卫星信号良好可实现返航。
- S:运动模式,基于自动定位模式,增加感度,姿态角最大可 45°
- G:迟缓模式,此模式下飞机运动较为迟缓,建议新手使用。
- M:手动,不使用 GNSS 与视觉定位系统,没有姿态增稳,无姿态角度限制。
返航功能:智能 / 低电压 / 失控返航
保护功能:失控保护 / 低电压保护 / 高度距离限制 / 特殊区域飞行限制 / 输出动力缺失保护(六旋翼以上才有用) / 动力保护 / 内置双 IMU / 内置数据记录仪 / 航向锁定 / 返航锁定
飞行特性:因硬件而差异,最大抗风 10 m/s,悬停精度垂直 ±0.5 m,水平 ± 1.5 m,最大偏航角速度 150 °/s
硬件安装#
主控器朝上并与机身平行,推荐方向朝向机头(若是别的方向,要在软件里设置),尽量安装在飞行器重心。
LED 模块可装在机身侧下方,方便飞行时观察状态。
PMU 模块要注意散热。
硬件调试#
指南针校准#
- 快速拨动 3 次 P / A 模式切换开关,此时黄灯常亮,进入校准状态。
- 水平旋转飞行器 360°,此时绿灯常亮。
- 使飞行器机头朝下,水平转 360°。
- 此时灯正常闪烁,完成校准。若红灯闪烁,则需重新校准。
参数设置#
- 基础感度(俯仰 / 横滚 / 航向):尽可能大,但也不要太大,太大会反馈过度,在悬停状态下高频抖动;反之如果太小则造成响应时间变长(可以类比游戏的网络延迟)且晃动。
- 油门:尽可能大,但过大起降过快,不安全;过小则会造成起降过慢,且影响上面几个参数。
- 动力带宽:因不同飞机而异,过小会造成响应慢、悬停状态下高频抖动(不够力);过大则修正过度,回中时出现慢速晃动 。
- 姿态灵敏度(刹车 / 姿态):姿态灵敏度越小则姿态命令跟随遥控器指令越慢,姿态响应更加平缓;刹车灵敏度描述刹车的快慢程度,越小则刹车过程越平缓且 刹车距离越长 。
- 姿态感度:过大则姿态响应更加迅猛,越小则响应迟缓
Recommend
-
12
微信小程序架构原理by.田光宇2018-9-3微信小程序微信小程序包含下面四种文件:json 配置文件wxml 小程序专用 xml 文件wxss 小程序专用 css 文件<view...
-
11
python实战项目,获取指定网站关键词百度排名,为seo提供参考资料 发表于 20...
-
10
MongoDB Manual (Version 4.2)> Sharding > Sharding Reference 本文将从以下三方面展开论述: mongo Shell的分片方法 分片数据库命令 mongo Shell中的分片方法 名称 描述 sh.addShard() 将分片添加到...
-
14
NewBeeNLP公众号原创出品 公众号专栏作者 @Maple小七 北京邮电大学·模式识别与智...
-
7
飞行:大疆的飞控——DJI-Naza-M Lite 新版调参软件安装及介绍 By: taho On: 20...
-
3
鑫创SSS1530/USB Typec音频声卡芯片方案设计参考资料 原创 鑫创SSS1530设计方案, S...
-
7
穿越机BetaFlight地面站滤波全部参数设置KZ的视频教程中文wiki参考资料 By:
-
8
词向量word2vec(图学习参考资料) 精选 原创 介绍词向量word2evc概念,及CBOW和Skip-gram的算法实现。 在自然语言处理任...
-
8
本项目参考: https://aistudio.baidu.com/aistudio/projectdetail/5012408?contributionType=1
-
3
2023-01-11 13:03 Axie Infinity 开发商 Sky Mavis 推出开发者门户网站,包含 API 参考资料、开发者控制台等 1 月 11 日,Axie Infinity 开发商 Sky Mavis 宣布推出开发者门户网站(Developer Portal),为开发者提...
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK