

6种常见的地标识别算法整理和总结
source link: https://my.oschina.net/u/4526289/blog/5023462
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
摘要:地标识别,基于深度学习及大规模图像训练,支持上千种物体识别及场景识别,广泛应用于拍照识图、幼教科普、图片分类等场景。本文将为大家带来6种关于地标识的算法整理和总结。
本文分享自华为云社区《地标识别算法》,原文作者:阿杜 。
地标识别,基于深度学习及大规模图像训练,支持上千种物体识别及场景识别,广泛应用于拍照识图、幼教科普、图片分类等场景。本文将为大家带来6种关于地标识的算法。
一、《1st Place Solution to Google Landmark Retrieval 2020》
算法思路:
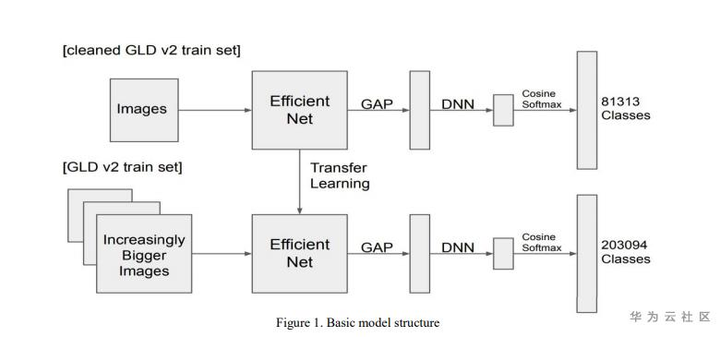
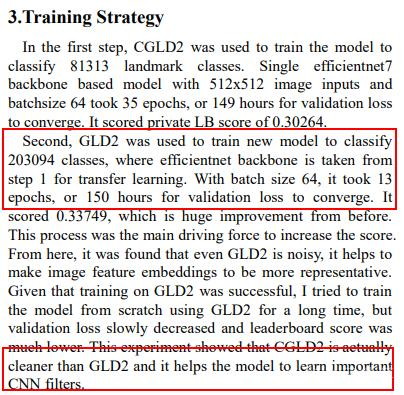
Step1:使用清洗过的GLDv2数据集训练初始embedding模型。
Step2:使用全量GLDv2数据基于Step1得到的模型进行迁移学习。
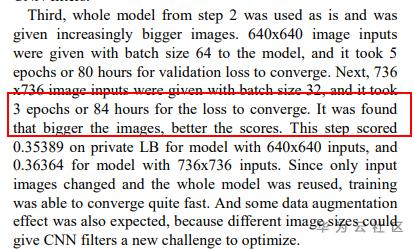
Step3:逐步扩大训练图片的尺度(512*512,640*640,736*736),模型性能得到进一步提升。
Step4:增加清洗后的数据的训练loss权重,进一步训练模型。
Step5:模型融合。
Notes:
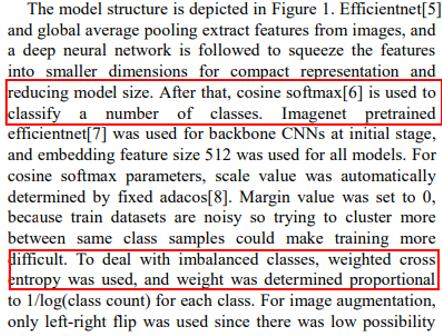
1、Backbone模型为Efficientnet+global average pooling,训练使用了cosine softmax loss。
2、为了处理类别不均衡问题,使用了weighted cross entropy。
经验总结:
1、清洗后的数据有利于模型快速收敛。
2、全量大数据集有利于模型学习到更好的特征表示。
3、增加训练分辨率能提升模型性能。
二、《3rd Place Solution to “Google Landmark Retrieval 2020》
算法思路:
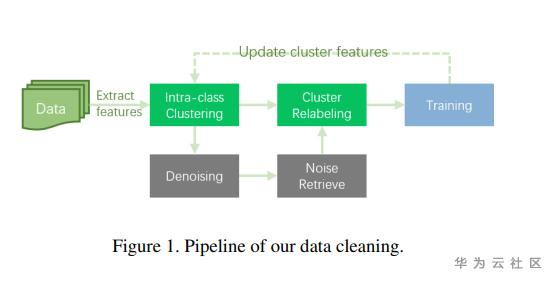
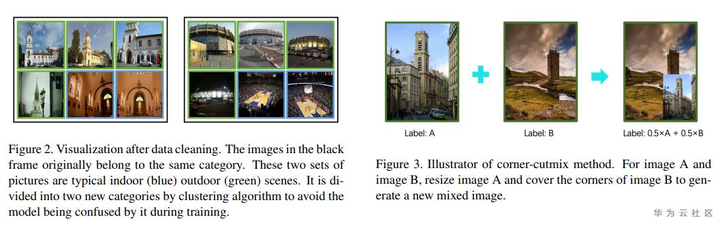
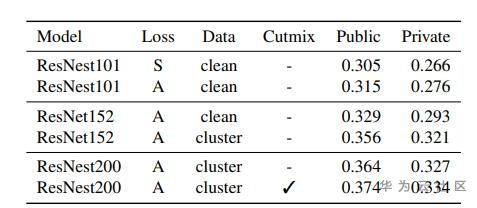
Step1:使用CGLDv2训练基础模型用于提取GLDv2全量图片特征,使用DBSCAN聚类方法更新图像类别,进行数据清洗。
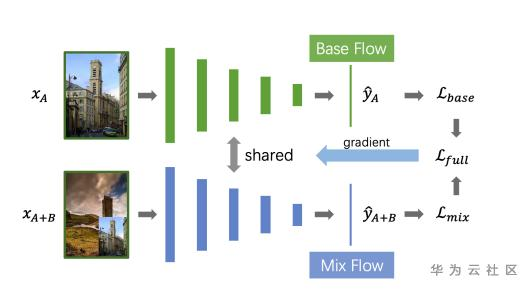
Step2:使用了Corner-Cutmix的图像增广方法,进行模型训练。
Notes:
1、backbone为ResNest200和ResNet152,GAP池化,1*1卷积降维到512维,损失函数为cross entropy loss。
三、《Two-stage Discriminative Re-ranking for Large-scale Landmark Retrieval》
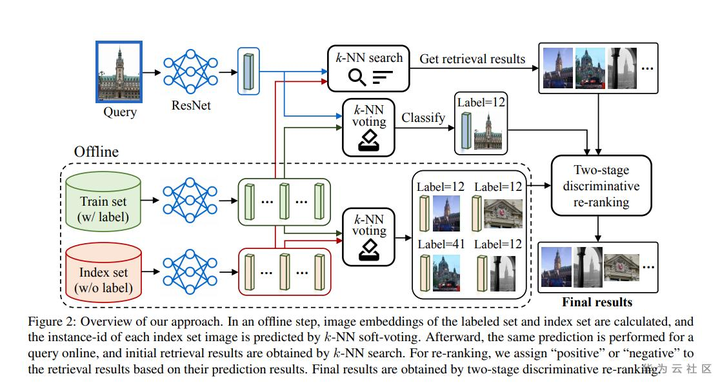
算法思路:
Step1:使用CNN特征进行KNN搜索,获取相似图片。
Step2:插入Step1遗漏的图片进行重新排序。
Notes:
1、Backbone模型为ResNet-101+Generalized Mean (GeM)-pooling,训练loss为ArcFace loss。
2、使用全局特征+局部特征对GLd-v2数据集进行清洗,用于后续模型训练。
四、《2nd Place and 2nd Place Solution to Kaggle Landmark Recognition and Retrieval Competition 2019》
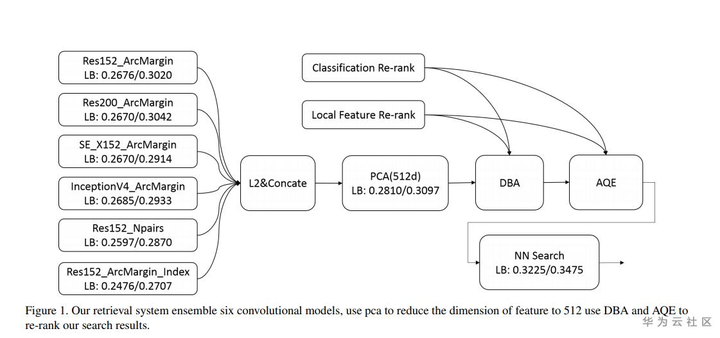
算法思路:
1、使用GLD-v2全量数据分别训练Resnet152、ResNet200等模型,训练loss为ArcFace loss、Npairs loss,拼接各个backbone的特征,使用PCA降到512维,作为图像的全局特征。
2、使用全局特征进行KNN搜索,对搜索结果使用SURF、Hassian-Affine 和root sift局部特征进行再排序,并且使用了DBA和AQE。
五、《Detect-to-Retrieve: Efficient Regional Aggregation for Image Search》
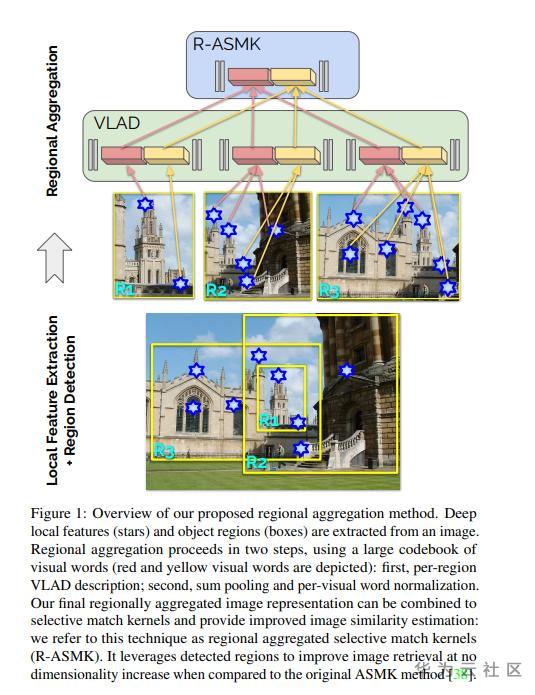
算法思路:
Step1:使用GLD的带bbox数据集,训练Faster-RCNN或SSD检测模型,用于地标框的提取。
Step2:提出了D2R-R-ASMK方法,用于检测框内的局部特征提取与特征聚合。
Step3:使用聚合后特征在database中进行搜索。
Notes:
1、D2R-R-ASMK基于DELF局部特征抽取和ASMK特征聚合方法实现。
2、每张图片提取4.05个region的时候效果最好,search的内存占用会有相应增加。
六、《Unifying Deep Local and Global Features for Image Search》
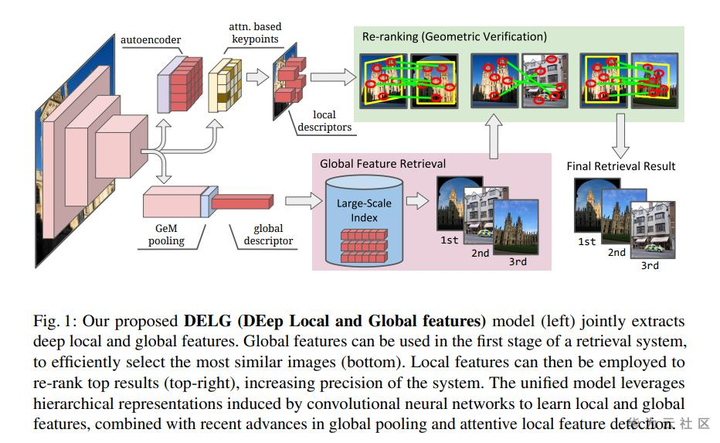
算法思路:
Step1:统一在同一个网络中提取全局和局部特征
Step2:使用全局特征搜索top100的相似图片
Step3:使用局部特征对搜索结果进行重排序
Notes:
1、全局特征使用GeM池化和ArcFace loss。
2、局部特征匹配使用Ransac方法。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK