

路径规划 | 图搜索算法:DFS、BFS、GBFS、Dijkstra、A*
source link: https://zhuanlan.zhihu.com/p/346666812
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.

路径规划 | 图搜索算法:DFS、BFS、GBFS、Dijkstra、A*
地图数据常常可以用图(Graph)这类数据结构表示,那么在图结构中常用的搜索算法也可以应用到路径规划中。
本文将从图搜索算法的基本流程入手,层层递进地介绍几种图搜索算法。首先是两种针对无权图的基本图搜索算法:深度优先搜索(Depth First Search, DFS)、广度优先搜索(Breadth First Search, BFS)。它们的区别在于openlist(后面介绍)所选用的数据结构类型不同,前者使用栈,后者使用队列;之后引入一种启发式搜索算法:贪婪最佳优先算法(Greedy Best First Search, GBFS),用来提高搜索效率,但是不能确保找到最优路径;最后介绍两种在路径规划中非常经典的算法:Dijkstra算法、A*算法,前者是广度优先算法(BFS)在带权图中的扩展,后者则是在前者中加入启发函数得到的算法,兼顾效率和完备性。
在学习路径规划算法之前,首先了解一下配置空间(Configuration Space)这个概念。在实际环境,也就是机器人的工作空间(Workspace)中,机器人是有形状和大小的,这不利于进行运动规划。要将工作空间转换到配置空间中,即将机器人转化为一个质点,同时将障碍物按照机器人的体积进行膨胀,如下图:
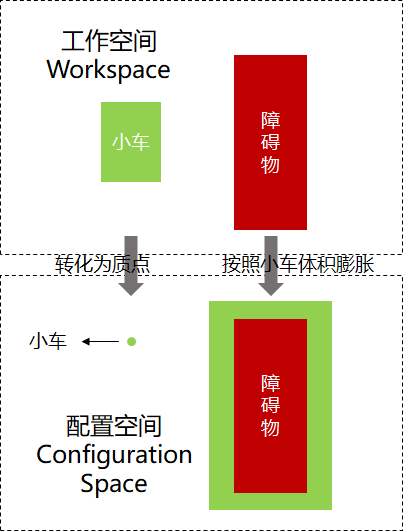
这样,在进行路径规划时,就可以将机器人当做一个点来处理了。
下面切入正题,图搜索算法的基本流程如下:
- 创建一个容器,一般称为openlist,用来存储将要访问的节点
- 将起点加入容器
- 开始循环:
- ---- 弹出:从容器中取出一个节点
- ---- 扩展:获取该节点周围的节点,将这些节点放入容器
深度优先搜索(DFS)
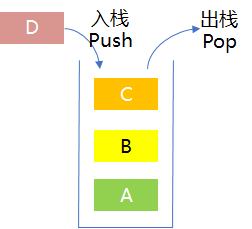
深度优先,顾名思义即深度越大的节点会被优先扩展。在DFS中,使用栈(Stack)数据结构来实现上述特性。
栈是一种后进先出(LIFO)的容器,如下图
以在下面的无权图中找到从节点a到节点i的路径为例,说明一下DFS算法的工作流程
按照上节的图搜索算法的基本流程进行搜索,过程如下:
从i回溯得到路径:a->b->c->g->i,如下:
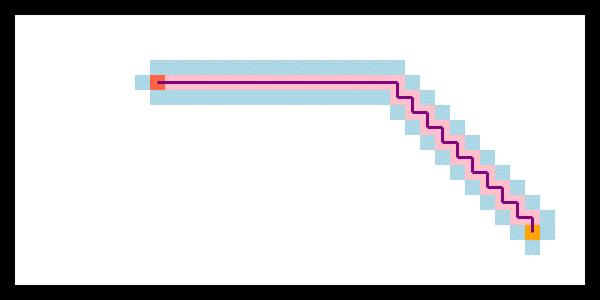
DFS能够快速地找到一条路径,是一种以时间换空间的方法。将其应用到二维地图的路径规划中,如下图,很显然找到的路径并不是移动机器人运动规划所需要的最优路径
广度优先搜索(BFS)
与DFS的“不撞南墙不回头”的个性不同,BFS在搜索时呈波状推进形式,一路稳扎稳打,它是一种以时间换空间的方法,能够保证搜索到的路径是最优的。
为了实现波状推进搜索特性,BFS采用队列(Queue)作为openlist的数据结构。队列是一种先进先出(FIFO)的容器,如下图
其流程与上节中DFS类似,继续以上节的图举例,过程如下,首先创建一个队列作为容器,将节点a加入队列
接着将节点a弹出队列,将节点a周围没有访问过的节点加入队列
按照上面的流程不断地弹出、扩展节点,直到找到节点i为止,完整流程如下图:
从终点回溯,i的父节点为f,f的父节点为e,e的父节点为a,这样就可以得到a到i的最短路径为:a->e->f->i,如下
显而易见,相较于DFS,BFS中使用了大量的入队、出队操作,耗时增加,但是能保证找到最优路径。
启发式搜索算法
BFS和DFS的区别主要在于节点的弹出策略,根据弹出策略的区别,分别使用了队列和栈两种数据结构,而栈和队列作为两种相当基本的容器,只将节点进入容器的顺序作为弹出节点的依据,并未考虑目标位置等因素,这就使搜索过程变得漫无目的,导致效率低下。启发式搜索算法(Heuristic Algorithm)就是用来解决搜索效率问题的,下面将以贪婪最佳优先算法(Greedy Best First Search, GBFS)为例来介绍启发式搜索算法。
GBFS也是图搜索算法的一种,它的算法流程和BFS、DFS并没有本质的不同,区别仍然在于openlist采用的数据结构,GBFS使用的是优先队列(Priority Queue),普通队列是一种先进先出的数据结构,而在优先队列中元素被赋予了优先级,最高优先级元素优先删除,也就是first in, largest out。(记住这种数据结构,后面的Dijkstra和A*算法都会用到这个结构)。
在图搜索算法中,使用代价函数 来作为优先级判断的标准,
越小,优先级越高,反之优先级越低。
GBFS作为一种启发式搜索算法,使用启发评估函数 来作为代价函数,也就是
其中 是当前节点到终点的代价,它可以指引搜索算法往终点靠近,主要用欧氏距离(Euclidean Distance)或者曼哈顿距离(Manhattan Distance)来表示,它们的区别如下图:
假设有两个点 和
,则它们的欧氏距离和曼哈顿距离分别为:
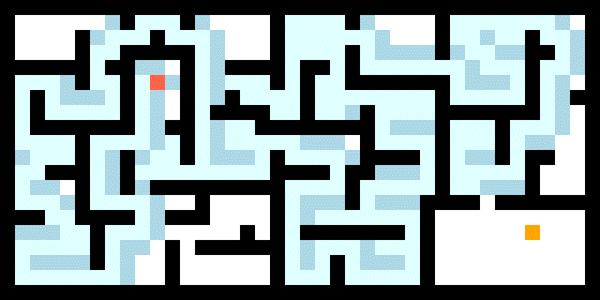
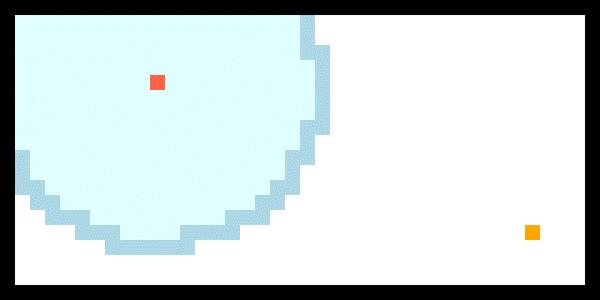
将GBFS应用在二维地图路径规划中,如下图,可以看到它的指向性或者说目的非常明显,从起点直扑终点。
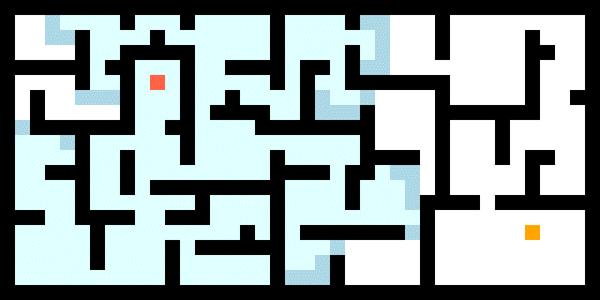
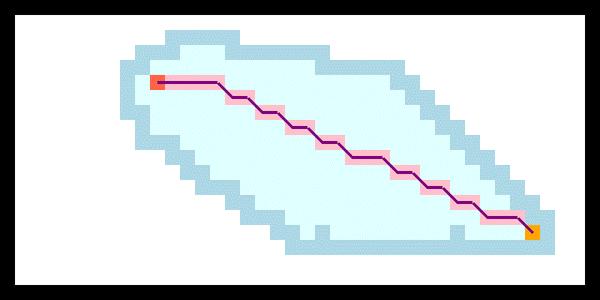
但是在实际的地图中,常常会有很多障碍物,它就很容易陷入局部最优的陷阱。下图的地图中有一个专门设置的局部最优陷阱,很显然GBFS虽然搜索速度够快,但是找不到最优路径。
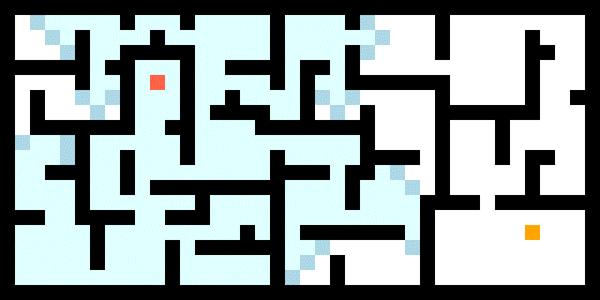
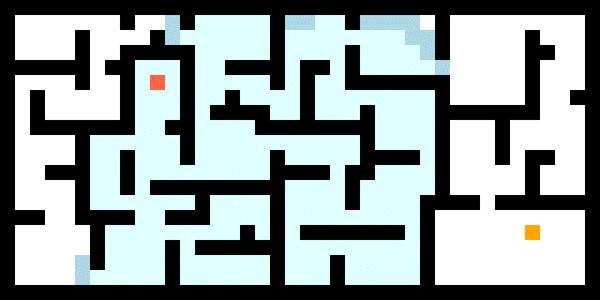
将其应用到复杂二维地图路径规划中,效果如下:
Dijkstra算法
上面的算法中,只有广度优先搜索(BFS)具有完备性,能够保证搜索到最优路径。但是可以看到BFS算法搜索到的路径只有向上/下/左/右移动这四个动作,它们是没有权值或者说权值都相同的,只能用于无权图的路径规划,无法实现能够对角移动的路径规划。因此下面介绍一种能用于带权图的图搜索算法——Dijkstra算法(狄克斯特拉算法)。
Dijkstra算法是从一个顶点到其余各顶点的最短路径算法,其流程仍然与上述算法基本一致,它也是用优先队列作为openlist的数据结构,它和GBFS的区别在于代价函数 的定义,Dijkstra算的
定义为:
其中 表示从起点到当前点的移动代价。
以下图为例,计算起点a到终点i的最短路径,箭头上的数值表示两个节点间的距离
首先扩展第一个节点,计算其余节点与第一个节点的距离,用橙色标出已经扩展的节点,未扩展的节点仍用绿色标出,其中圆中的数值表示该节点的代价函数,字母则表示该节点没有直接到达此时已扩展节点的路径。从未扩展的节点(绿色节点)中选择代价函数最小的节点进行拓展,并更新其余节点的代价函数,如下图
重复进行上面的步骤,直到所有节点都已扩展。
最后标出起点到终点的最短路径
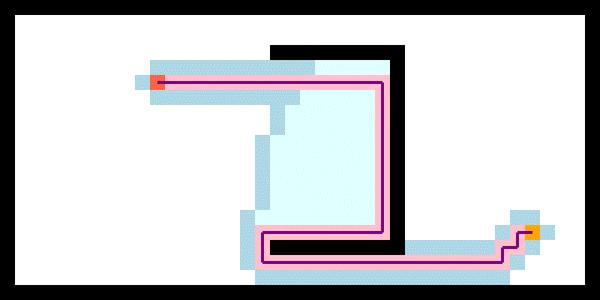
将Dijkstra算法应用到二维地图路径规划中,如下图,可以看到Dijkstra算法能够得到最优路径,但是它的速度和BFS是一样的,采取的都是稳扎稳打、波状前进的方式,导致速度较慢。
对比GBFS和Dijkstra算法,两者都采用优先队列作为openlist,而代价函数的不同导致两者具有不同的优点:GBFS用节点到目标点的距离作为代价函数,将搜索方向引向目标点,搜索效率高;而Dijkstra算法采用起点到当前扩展节点的移动代价作为代价函数,能够确保路径最优。
那么可不可以将两者的代价函数进行融合,从而在保证路径最优的同时提高搜索效率?答案是肯定的,融合后的算法就是A*算法。
A*算法也是一种启发式算法,它的代价函数表示为:
其中 为起点到当前扩展节点的移动代价函数,
是启发函数,用节点到目标点的距离函数来表示。
根据这个式子,可以得到A*算法的几个特点:
- 如果令
,A*算法就退化为Dijkstra算法;如果令
,A*算法就退化为GBFS算法。
- 能否找到最优路径的关键是启发函数
的选取,如果
- 由于A* 算法的启发函数是位置上的距离,因此在不带位置信息的图数据中不适用。
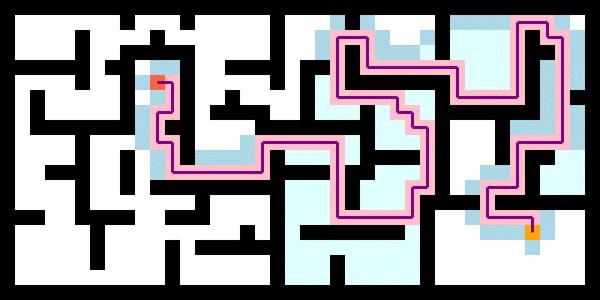
将A*算法应用到二维地图路径规划中,如下图:
附录:图基础
本节附录将介绍什么是图数据结构,以及图数据结构在计算机中的表示方法。
图结构是一种由数据元素集合及元素间的关系集合组成的非线性数据结构。数据元素用节点(node)表示,元素间的关系用边(edge)表示,如果两个元素相关,就用一条边将相应的节点连接起来,这两个节点称为相邻节点。根据边的方向性,可以分为无向图和有向图,一个无向图G记做 ,其中
是节点的有限集合,
是边的有限集合,则有:
上式中, 表示节点x和节点y之间的相邻关系,是一种无序节点对,无方向性,称为连接节点x和节点y的一条边。如果节点间关系是有序节点对,则用
表示,表示从节点x到节点y的一条单向边,是有方向的,则有向边的集合可表示为:
下图分别为无向图和有向图的图形化示例:
上图中的无向图可以表示为:
有向图可表示为:
在图中除了用边表示两个节点之间的相邻关系外,有时还需要表示它们相关的强度信息,例如从一个节点到另一个节点的距离、花费的代价、所需的时间等,诸如此类的信息可以通过在图的每条边上加上一个称作权(weight)的数值表示,这类图称为带权图
上述就是图结构的基本概念,我们还需要知道图结构在计算机中的表示方法
图结构的邻接矩阵表示法
邻接矩阵用来表示图的边集,即节点间的相邻关系集合。设 是一个具有n个节点的图,它的邻接矩阵是一个n阶矩阵,则其中的元素
满足:
对于无向图,其邻接矩阵是对称矩阵,即 ,而有向图的邻接矩阵不一定对称,其空间复杂度均为
。以下为两个不带权图的邻接矩阵示例:
对于带权图,设 或者
上的权值为
,则带权图的邻接矩阵定义为:
以下为两个带权图的邻接矩阵示例:
图结构的邻接表表示法
邻接矩阵表示法的空间复杂度为 ,其占用的空间大小与图中节点数量相关,而与边的数目无关。对于稀疏图,其边的数量可能远小于
,这样邻接矩阵中就会有很多零或
元素。对于这种情况,可以用节点表和邻接表来表示和存储图结构,其占用的存储空间既与图的节点数有关,也与边数有关。
图的节点表用来保存图中的所有节点,通常是一个顺序存储的线性表,该线性表中的每个元素对应图中的一个节点,该节点类型包括两个基本成员:节点数据元素信息data和指向该节点的邻接表neighbors。对于无向图有:
图的实现(c++)_y1054765649的博客-CSDN博客_c++ 图blog.csdn.netRecommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK