

Binder系列5—注册服务(addService)
source link: http://yuanfentiank789.github.io/2015/11/14/binder-add-service/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
基于Android 6.0的源码剖析, 本文讲解如何向ServiceManager注册Native层的服务的过程。
/framework/native/libs/binder/IServiceManager.cpp
/framework/native/libs/binder/BpBinder.cpp
/framework/native/libs/binder/IPCThreadState.cpp
/framework/native/libs/binder/Binder.cpp
/framework/native/libs/binder/ProcessState.cpp
/framework/av/media/libmediaplayerservice/MediaPlayerService.cpp
在Native层的服务以media服务为例,注册服务media的入口函数是main_mediaserver.cpp中的main()方法,代码如下:
int main(int argc __unused, char** argv)
{
...
InitializeIcuOrDie(); //初始化ICU,国际通用编码方案。
//获得ProcessState实例对象
sp<ProcessState> proc(ProcessState::self());
//获取ServiceManager实例对象 【见文章《获取ServiceManager》】
sp<IServiceManager> sm = defaultServiceManager();
AudioFlinger::instantiate();
//多媒体服务 【见流程1~13】
MediaPlayerService::instantiate();
ResourceManagerService::instantiate();
CameraService::instantiate();
AudioPolicyService::instantiate();
SoundTriggerHwService::instantiate();
RadioService::instantiate();
registerExtensions();
//创建Binder线程,并加入线程池【见流程14】
ProcessState::self()->startThreadPool();
//当前线程加入到线程池 【见流程16】
IPCThreadState::self()->joinThreadPool();
}
该过程的主要流程如下所示:
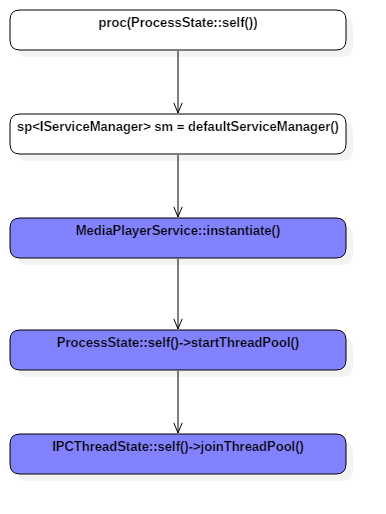
其中ProcessState::self()和defaultServiceManager()过程在上一篇文章获取ServiceManager已讲过,下面说说后3个方法的具体工作内容。
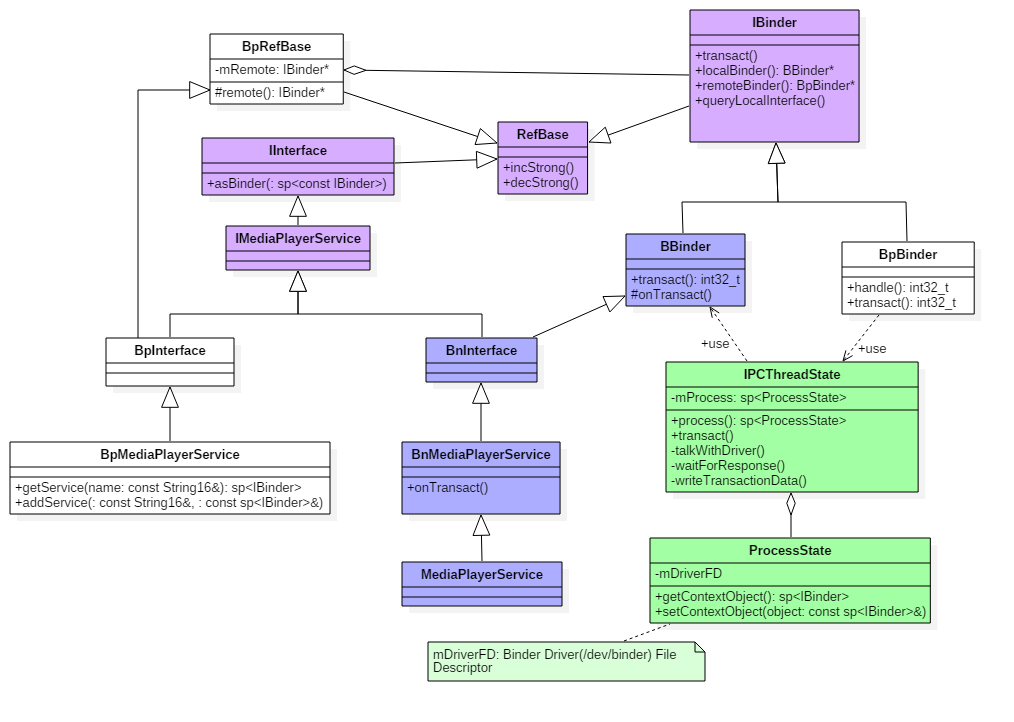
类图:
在Native层的服务注册,我们选择以media为例来展开讲解,先来看看media的类关系图。
点击查看大图
{kind=link}
- 蓝色代表的是注册MediaPlayerService服务所涉及的类
- 绿色代表的是Binder架构中与Binder驱动通信过程中的最为核心的两个类;
- 紫色代表的是注册服务和获取服务的公共接口/父类;
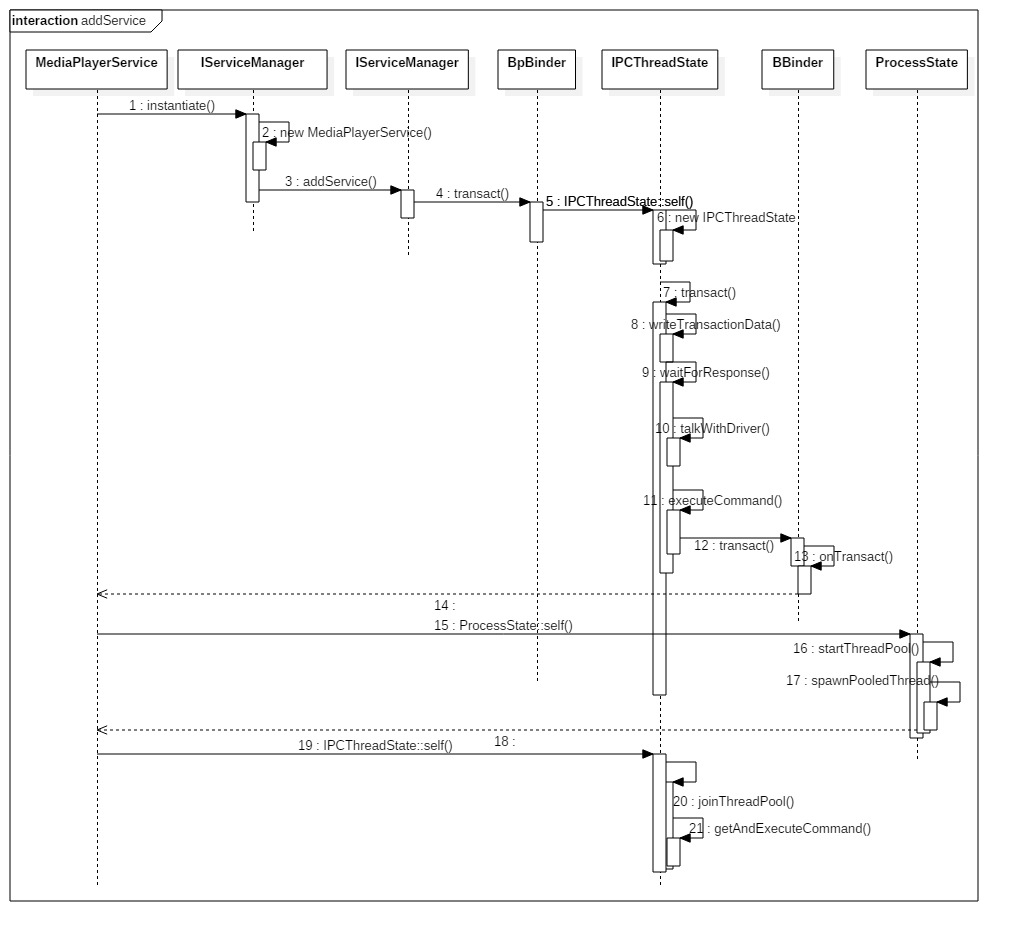
时序图
点击查看大图
{kind=link}
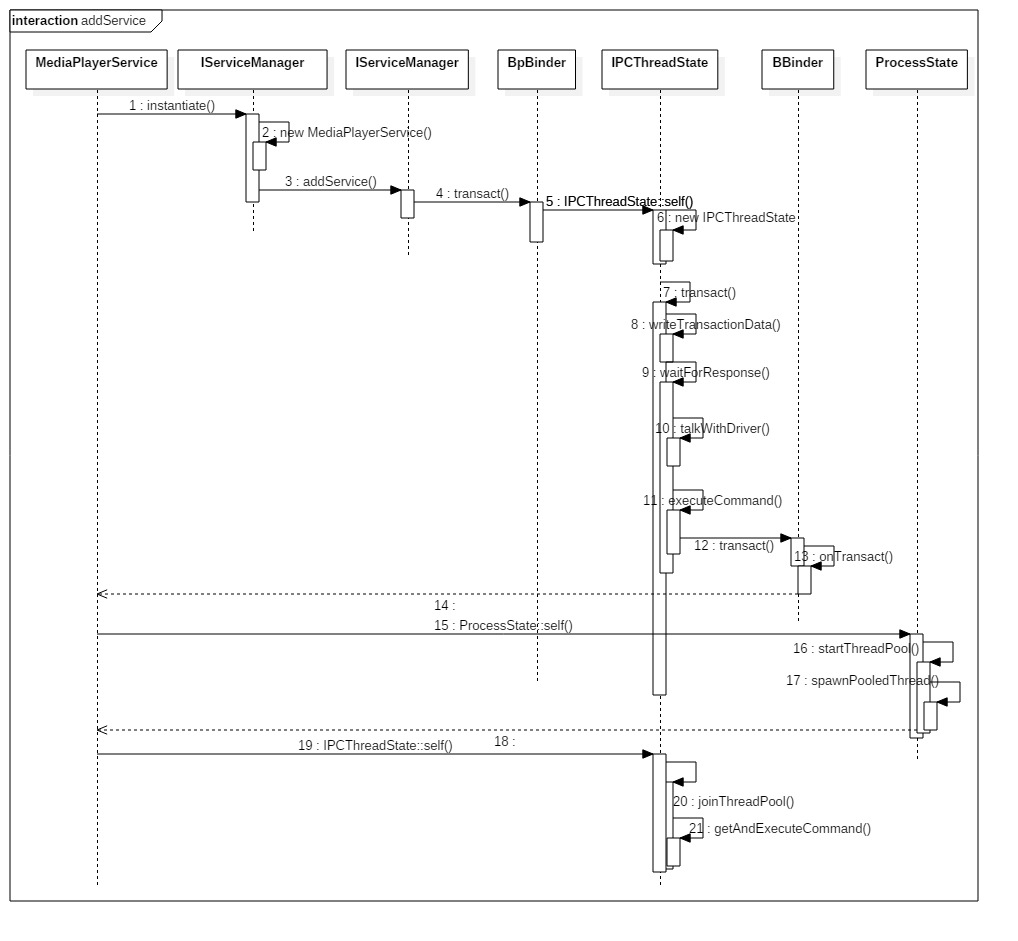
注意每小节前的[ 数字 ] 是与时序图所处的顺序编号一一对应,中间会省略部分方法,所以看到的小节可能并非连续的,建议读者一个窗口打开时序图,另一个窗口顺着文章往下读,这样不至于迷糊。另外,为了让每小节标题更加紧凑,下面流程采用如下简称:
MPS: MediaPlayerService
IPC: IPCThreadState
PS: ProcessState
ISM: IServiceManager
1. MPS:instantiate
==> /framework/av/media/libmediaplayerservice/MediaPlayerService.cpp
void MediaPlayerService::instantiate() {
defaultServiceManager()->addService(
String16("media.player"), new MediaPlayerService()); 【见流程3】
}
注册服务MediaPlayerService:由defaultServiceManager()返回的是BpServiceManager,同时会创建ProcessState对象和BpBinder对象。故此处等价于调用BpServiceManager->addService。关于MediaPlayerService创建过程,此处就省略后面有时间会单独介绍,接下来进入流程[3]。
3. ISM.addService
==> /framework/native/libs/binder/IServiceManager.cpp
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated)
{
Parcel data, reply; //Parcel是数据通信包
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor()); //写入RPC头信息
data.writeString16(name); // name为 "media.player"
data.writeStrongBinder(service); // MediaPlayerService对象
data.writeInt32(allowIsolated ? 1 : 0); // allowIsolated= false
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply); //【见流程4】
return err == NO_ERROR ? reply.readExceptionCode() : err;
}
服务注册过程
- 将名叫”media.player”的MediaPlayerService服务注册到ServiceManager;
- RPC头信息为 “android.os.IServiceManager”;
- remote()就是BpBinder();
4. BpBinder::transact
==> /framework/native/libs/binder/BpBinder.cpp
由【流程3】传递过来的参数:transact(ADD_SERVICE_TRANSACTION, data, &reply, 0);
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
if (mAlive) {
// 【见流程5和7】
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
Binder代理类调用transact()方法,真正工作还是交给IPCThreadState来进行transact工作,
5. IPCThreadState::self
==> /framework/native/libs/binder/IPCThreadState.cpp
IPCThreadState* IPCThreadState::self()
{
if (gHaveTLS) {
restart:
const pthread_key_t k = gTLS;
IPCThreadState* st = (IPCThreadState*)pthread_getspecific(k);
if (st) return st;
return new IPCThreadState; //初始IPCThreadState 【见流程6】
}
if (gShutdown) return NULL;
pthread_mutex_lock(&gTLSMutex);
if (!gHaveTLS) { //首次进入gHaveTLS为false
if (pthread_key_create(&gTLS, threadDestructor) != 0) { //创建线程的TLS
pthread_mutex_unlock(&gTLSMutex);
return NULL;
}
gHaveTLS = true;
}
pthread_mutex_unlock(&gTLSMutex);
goto restart;
}
获取IPCThreadState对象
TLS是指Thread local storage(线程本地储存空间),每个线程都拥有自己的TLS,并且是私有空间,线程之间不会共享。通过pthread_getspecific/pthread_setspecific函数可以获取/设置这些空间中的内容。从线程本地存储空间中获得保存在其中的IPCThreadState对象。
6. new IPCThreadState
==> /framework/native/libs/binder/IPCThreadState.cpp
IPCThreadState::IPCThreadState()
: mProcess(ProcessState::self()),
mMyThreadId(gettid()),
mStrictModePolicy(0),
mLastTransactionBinderFlags(0)
{
pthread_setspecific(gTLS, this);
clearCaller();
mIn.setDataCapacity(256);
mOut.setDataCapacity(256);
}
每个线程都有一个IPCThreadState,每个IPCThreadState中都有一个mIn、一个mOut。成员变量mProcess保存了ProcessState变量(每个进程只有一个)。
- mIn 用来接收来自Binder设备的数据,默认大小为256字节;
- mOut用来存储发往Binder设备的数据,默认大小为256字节。
7. IPC::transact
==> /framework/native/libs/binder/IPCThreadState.cpp
由【流程4】传递过来的参数:transact (0,ADD_SERVICE_TRANSACTION, data, &reply, 0);
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck(); //数据错误检查
flags |= TF_ACCEPT_FDS;
....
if (err == NO_ERROR) {
// 传输数据 【见流程8】
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
if (err != NO_ERROR) {
if (reply) reply->setError(err);
return (mLastError = err);
}
if ((flags & TF_ONE_WAY) == 0) { //flgs=0进入该分支
if (reply) {
//等待响应 【见流程9】
err = waitForResponse(reply);
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
} else {
//不需要响应消息的binder则进入该分支
err = waitForResponse(NULL, NULL);
}
return err;
}
IPCThreadState进行transact事务处理分3部分:
- errorCheck() //数据错误检查
- writeTransactionData() // 传输数据
- waitForResponse() //f等待响应
8. IPC.writeTransactionData
==> /framework/native/libs/binder/IPCThreadState.cpp
由【流程7】传递过来的参数:writeTransactionData(BC_TRANSACTION, 0, 0, ADD_SERVICE_TRANSACTION, data, NULL)
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
tr.target.ptr = 0;
tr.target.handle = handle; // handle=0
tr.code = code; // ADD_SERVICE_TRANSACTION
tr.flags = binderFlags; // 0
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize(); // data为Media服务相关的parcel通信数据包
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
} else if (statusBuffer) {
tr.flags |= TF_STATUS_CODE;
*statusBuffer = err;
tr.data_size = sizeof(status_t);
tr.data.ptr.buffer = reinterpret_cast<uintptr_t>(statusBuffer);
tr.offsets_size = 0;
tr.data.ptr.offsets = 0;
} else {
return (mLastError = err);
}
mOut.writeInt32(cmd); //cmd = BC_TRANSACTION
mOut.write(&tr, sizeof(tr)); //写入binder_transaction_data数据
return NO_ERROR;
}
其中handle的值用来标识目的端,注册服务过程的目的端为service manager,此处handle=0所对应的是binder_context_mgr_node对象,正是service manager所对应的binder实体对象。binder_transaction_data结构体是binder驱动通信的数据结构,该过程最终是把Binder请求码BC_TRANSACTION和binder_transaction_data结构体写入到mOut。
9. IPC.waitForResponse
==> /framework/native/libs/binder/IPCThreadState.cpp
【流程7】传递过来的参数:waitForResponse(&reply, NULL);
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
int32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break; // 【见流程10】
err = mIn.errorCheck();
if (err < NO_ERROR) break;
if (mIn.dataAvail() == 0) continue;
cmd = mIn.readInt32();
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
case BR_DEAD_REPLY:
err = DEAD_OBJECT;
goto finish;
case BR_FAILED_REPLY:
err = FAILED_TRANSACTION;
goto finish;
case BR_ACQUIRE_RESULT:
{
const int32_t result = mIn.readInt32();
if (!acquireResult) continue;
*acquireResult = result ? NO_ERROR : INVALID_OPERATION;
}
goto finish;
case BR_REPLY:
{
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
if (err != NO_ERROR) goto finish;
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
reply->ipcSetDataReference(
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t),
freeBuffer, this);
} else {
err = *reinterpret_cast<const status_t*>(tr.data.ptr.buffer);
freeBuffer(NULL,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), this);
}
} else {
freeBuffer(NULL,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), this);
continue;
}
}
goto finish;
default:
err = executeCommand(cmd); //【见流程11】
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
if (acquireResult) *acquireResult = err;
if (reply) reply->setError(err);
mLastError = err;
}
return err;
}
不断循环地与Binder驱动设备交互,获取响应信息
10. IPC.talkWithDriver
==> /framework/native/libs/binder/IPCThreadState.cpp
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
if (mProcess->mDriverFD <= 0) {
return -EBADF;
}
binder_write_read bwr;
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
if (doReceive && needRead) {
//接收数据缓冲区信息的填充。如果以后收到数据,就直接填在mIn中了。
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
#if defined(HAVE_ANDROID_OS)
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0) //ioctl不停的读写操作
err = NO_ERROR;
else
err = -errno;
#else
err = INVALID_OPERATION;
#endif
if (mProcess->mDriverFD <= 0) {
err = -EBADF;
}
} while (err == -EINTR);
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
return NO_ERROR;
}
return err;
}
binder_write_read结构体用来与Binder设备交换数据的结构, 通过ioctl与mDriverFD通信,是真正与Binder驱动进行数据读写交互的过程。
11. IPC.executeCommand
==> /framework/native/libs/binder/IPCThreadState.cpp
根据收到的响应消息,执行相应的操作
【流程9】传递过来的参数:executeCommand(BR_TRANSACTION)
status_t IPCThreadState::executeCommand(int32_t cmd)
{
BBinder* obj;
RefBase::weakref_type* refs;
status_t result = NO_ERROR;
switch (cmd) {
case BR_ERROR:
result = mIn.readInt32();
break;
case BR_OK:
break;
case BR_ACQUIRE:
refs = (RefBase::weakref_type*)mIn.readPointer();
obj = (BBinder*)mIn.readPointer();
obj->incStrong(mProcess.get());
mOut.writeInt32(BC_ACQUIRE_DONE);
mOut.writePointer((uintptr_t)refs);
mOut.writePointer((uintptr_t)obj);
break;
case BR_RELEASE:
refs = (RefBase::weakref_type*)mIn.readPointer();
obj = (BBinder*)mIn.readPointer();
mPendingStrongDerefs.push(obj);
break;
case BR_INCREFS:
refs = (RefBase::weakref_type*)mIn.readPointer();
obj = (BBinder*)mIn.readPointer();
refs->incWeak(mProcess.get());
mOut.writeInt32(BC_INCREFS_DONE);
mOut.writePointer((uintptr_t)refs);
mOut.writePointer((uintptr_t)obj);
break;
case BR_DECREFS:
refs = (RefBase::weakref_type*)mIn.readPointer();
obj = (BBinder*)mIn.readPointer();
mPendingWeakDerefs.push(refs);
break;
case BR_ATTEMPT_ACQUIRE:
refs = (RefBase::weakref_type*)mIn.readPointer();
obj = (BBinder*)mIn.readPointer();
const bool success = refs->attemptIncStrong(mProcess.get());
mOut.writeInt32(BC_ACQUIRE_RESULT);
mOut.writeInt32((int32_t)success);
break;
case BR_TRANSACTION:
{
binder_transaction_data tr;
result = mIn.read(&tr, sizeof(tr));
if (result != NO_ERROR) break;
Parcel buffer;
buffer.ipcSetDataReference(
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), freeBuffer, this);
const pid_t origPid = mCallingPid;
const uid_t origUid = mCallingUid;
const int32_t origStrictModePolicy = mStrictModePolicy;
const int32_t origTransactionBinderFlags = mLastTransactionBinderFlags;
mCallingPid = tr.sender_pid;
mCallingUid = tr.sender_euid;
mLastTransactionBinderFlags = tr.flags;
int curPrio = getpriority(PRIO_PROCESS, mMyThreadId);
if (gDisableBackgroundScheduling) {
if (curPrio > ANDROID_PRIORITY_NORMAL) {
setpriority(PRIO_PROCESS, mMyThreadId, ANDROID_PRIORITY_NORMAL);
}
} else {
if (curPrio >= ANDROID_PRIORITY_BACKGROUND) {
set_sched_policy(mMyThreadId, SP_BACKGROUND);
}
}
Parcel reply;
status_t error;
// tr.cookie里存放的是BBinder,此处b是BBinder的实现子类
if (tr.target.ptr) {
sp<BBinder> b((BBinder*)tr.cookie);
error = b->transact(tr.code, buffer, &reply, tr.flags); //【见流程12】
} else {
error = the_context_object->transact(tr.code, buffer, &reply, tr.flags);
}
if ((tr.flags & TF_ONE_WAY) == 0) {
if (error < NO_ERROR) reply.setError(error);
sendReply(reply, 0);
}
mCallingPid = origPid;
mCallingUid = origUid;
mStrictModePolicy = origStrictModePolicy;
mLastTransactionBinderFlags = origTransactionBinderFlags;
}
break;
case BR_DEAD_BINDER:
{ //收到binder驱动发来的service死掉的消息,只有Bp端能收到。
BpBinder *proxy = (BpBinder*)mIn.readPointer();
proxy->sendObituary();
mOut.writeInt32(BC_DEAD_BINDER_DONE);
mOut.writePointer((uintptr_t)proxy);
} break;
case BR_CLEAR_DEATH_NOTIFICATION_DONE:
{
BpBinder *proxy = (BpBinder*)mIn.readPointer();
proxy->getWeakRefs()->decWeak(proxy);
} break;
case BR_FINISHED:
result = TIMED_OUT;
break;
case BR_NOOP:
break;
case BR_SPAWN_LOOPER:
//收到来自驱动的指示以创建一个新线程,用于和Binder通信 【见流程17】
mProcess->spawnPooledThread(false);
break;
default:
result = UNKNOWN_ERROR;
break;
}
if (result != NO_ERROR) {
mLastError = result;
}
return result;
}
12. BBinder::transact
==> /framework/native/libs/binder/Binder.cpp
服务端transact事务处理
status_t BBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
data.setDataPosition(0);
status_t err = NO_ERROR;
switch (code) {
case PING_TRANSACTION:
reply->writeInt32(pingBinder());
break;
default:
err = onTransact(code, data, reply, flags); //【见流程13】
break;
}
if (reply != NULL) {
reply->setDataPosition(0);
}
return err;
}
13. BBinder::onTransact
==> /framework/native/libs/binder/Binder.cpp
服务端事务回调处理函数
status_t BBinder::onTransact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t /*flags*/)
{
switch (code) {
case INTERFACE_TRANSACTION:
reply->writeString16(getInterfaceDescriptor());
return NO_ERROR;
case DUMP_TRANSACTION: {
int fd = data.readFileDescriptor();
int argc = data.readInt32();
Vector<String16> args;
for (int i = 0; i < argc && data.dataAvail() > 0; i++) {
args.add(data.readString16());
}
return dump(fd, args);
}
case SYSPROPS_TRANSACTION: {
report_sysprop_change();
return NO_ERROR;
}
default:
return UNKNOWN_TRANSACTION;
}
}
对于MediaPlayerService的场景下,事实上BnMediaPlayerService继承了BBinder类,且重载了onTransact()方法,故实际调用的是BnMediaPlayerService::onTransact()方法。
从流程1到流程13,整个过程是MediaPlayerService服务向Service Manager进程进行服务注册的过程。在整个过程涉及到MediaPlayerService(作为Client进程)和Service Manager(作为Service进程),通信流程图如下所示:
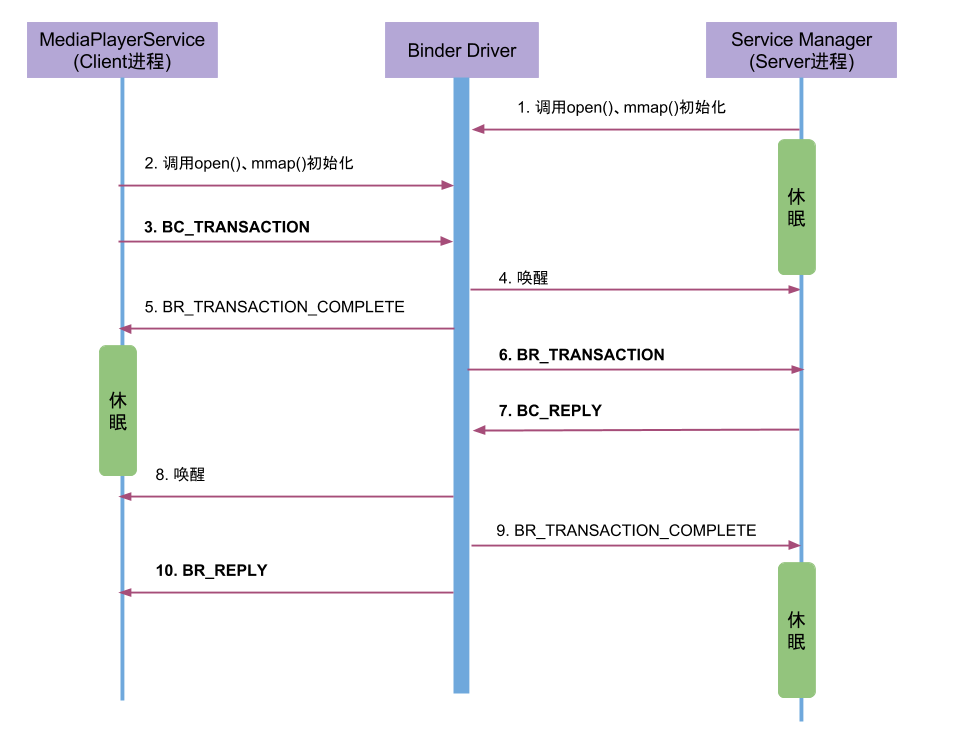
过程分析:
- MediaPlayerService进程调用
ioctl()向Binder驱动发送IPC数据,该过程可以理解成一个事务binder_transaction(记为T1),执行当前操作的线程binder_thread(记为thread1),则T1->from_parent=NULL,T1->from =thread1,thread1->transaction_stack=T1。其中IPC数据内容包含:- Binder协议为BC_TRANSACTION;
- Handle等于0;
- RPC代码为ADD_SERVICE;
- RPC数据为”media.player”。
-
Binder驱动收到该Binder请求,生成
BR_TRANSACTION命令,选择目标处理该请求的线程,即ServiceManager的binder线程(记为thread2),则 T1->to_parent = NULL,T1->to_thread =thread2。并将整个binder_transaction数据(记为T2)插入到目标线程的todo队列; -
Service Manager的线程
thread2收到T2后,调用服务注册函数将服务”media.player”注册到服务目录中。当服务注册完成后,生成IPC应答数据(BC_REPLY),T2->form_parent = T1,T2->from = thread2, thread2-)->transaction_stack = T2。 - Binder驱动收到该Binder应答请求,生成
BR_REPLY命令,T2->to_parent = T1,T2->to_thread = thread1, thread1->transaction_stack = T2。 在MediaPlayerService收到该命令后,知道服务注册完成便可以正常使用。
整个过程中,BC_TRANSACTION和BR_TRANSACTION过程是一个完整的事务过程;BC_REPLY和BR_REPLY是一个完整的事务过程。 到此,其他进行便可以获取该服务,使用服务提供的方法,下一篇文章将会讲述如何获取服务。
14 PS.startThreadPool
==> /framework/native/libs/binder/ProcessState.cpp
先通过ProcessState::self(),来获取单例对象ProcessState,再进行启动线程池
void ProcessState::startThreadPool()
{
AutoMutex _l(mLock); //多线程同步 自动锁
if (!mThreadPoolStarted) {
mThreadPoolStarted = true;
spawnPooledThread(true); 【见流程15】
}
}
通过变量mThreadPoolStarted来保证每个应用进程只允许主动创建一个binder线程,其余binder线程池中的线程都是由Binder驱动来控制创建的。
15. PS.spawnPooledThread
==> /framework/native/libs/binder/ProcessState.cpp
void ProcessState::spawnPooledThread(bool isMain)
{
if (mThreadPoolStarted) {
String8 name = makeBinderThreadName(); //获取Binder线程名
sp<Thread> t = new PoolThread(isMain); //isMain=true
t->run(name.string());
}
}
- 获取Binder线程名,格式为
Binder_x, 其中x为整数。每个进程中的binder编码是从1开始,依次递增; - 在终端通过
ps -t | grep Binder,能看到当前所有的Binder线程。
从函数名看起来是创建线程池,其实就只是创建一个线程,该PoolThread继承Thread类。t->run()方法最终调用 PoolThread的threadLoop()方法。
class PoolThread : public Thread
{
public:
PoolThread(bool isMain)
: mIsMain(isMain)
{
}
protected:
virtual bool threadLoop()
{
IPCThreadState::self()->joinThreadPool(mIsMain); // 【见流程16】
return false;
}
const bool mIsMain;
};
16 IPC.joinThreadPool()
==> /framework/native/libs/binder/ProcessState.cpp
void IPCThreadState::joinThreadPool(bool isMain)
{
//创建Binder线程
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
set_sched_policy(mMyThreadId, SP_FOREGROUND); //设置前台调度策略
status_t result;
do {
processPendingDerefs(); //清除队列的引用
result = getAndExecuteCommand(); //处理下一条指令 【见流程17】
if (result < NO_ERROR && result != TIMED_OUT && result != -ECONNREFUSED && result != -EBADF) {
abort();
}
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
mOut.writeInt32(BC_EXIT_LOOPER); // 线程退出循环
talkWithDriver(false); //false代表bwr数据的read_buffer为空 【见流程10】
}
先通过IPCThreadState::self(),来获取单例对象IPCThreadState,再join到线程池中。对于前面新创建的线程
new PoolThread()以及当前线程,都会调用到该方法。
将线程调度策略设置SP_FOREGROUND,当已启动的线程由后台的scheduling group创建,可以避免由后台线程优先级来执行初始化的transaction。
对于参数isMain=true的情况下,command为BC_ENTER_LOOPER,表示是程序主动创建的线程;而对于isMain=false的情况下,command为BC_REGISTER_LOOPER,表示是由binder驱动强制创建的线程。Binder设计架构中,只有第一个Binder线程是由应用层主动创建,对于Binder线程池其他的线程都是由Binder驱动根据IPC通信需求来控制创建的。
17 IPC.getAndExecuteCommand
==> /framework/native/libs/binder/IPCThreadState.cpp
获取并处理指令
status_t IPCThreadState::getAndExecuteCommand()
{
status_t result;
int32_t cmd;
result = talkWithDriver(); //与binder进行交互 【见流程10】
if (result >= NO_ERROR) {
size_t IN = mIn.dataAvail();
if (IN < sizeof(int32_t)) return result;
cmd = mIn.readInt32();
pthread_mutex_lock(&mProcess->mThreadCountLock);
mProcess->mExecutingThreadsCount++;
pthread_mutex_unlock(&mProcess->mThreadCountLock);
result = executeCommand(cmd); //执行Binder响应码 【见流程11】
pthread_mutex_lock(&mProcess->mThreadCountLock);
mProcess->mExecutingThreadsCount--;
pthread_cond_broadcast(&mProcess->mThreadCountDecrement);
pthread_mutex_unlock(&mProcess->mThreadCountLock);
set_sched_policy(mMyThreadId, SP_FOREGROUND);
}
return result;
}
MediaPlayerService服务注册
- 前面13个步骤的功能是MediaPlayerService服务向ServiceManager进行服务注册的过程
- 接下来,通过startThreadPool()方法创建了一个binder线程,该线程在不断跟Binder驱动进行交互;
- 最后,当前主线程通过joinThreadPool,也实现了Binder进行交互;
故至少有两个线程与Binder驱动进行交互,后续更加需求Binder驱动会增加binder线程个数,线程池默认上限为16个。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK