

自适应GPU几何细分
source link: https://zhuanlan.zhihu.com/p/109958452
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
自适应GPU几何细分
本文基于GPU Zen 2--->Adaptive GPU Tessellation with Compute Shaders
现代GPU是按照Quad-Pixel的方式来进行光栅化的,如果三角形太小同时出现占据跨Quad的Sub-Pixel,就容易出现OverShading的情况,同时ZBuffer性能降低。 为了解决这个问题,Lod系统就自然出现。早期有基于CPU的方法,其问题在于占用了物理计算等游戏逻辑的处理时间。
而后进化成集成到GPU管线的Tessellation Shader,它的限制有两点,其一是细分等级的限制,目前最多在每个Patch中细分出64个Sub-Patch,也就是以6为上限的细分等级。其二是达到某个细分等级就会出现性能峰值。

本文采用BitMap的方式,以固定Buffer大小为前提,在GPU中能够实现快速且合理的网格细分。原文是OpenGL实现,采用列主序,本文采用行主序表示法。
三角形表示法
按二进制的形式存储三角形ID,如此可以快速索引到父与子图元,做到合并及细分操作。
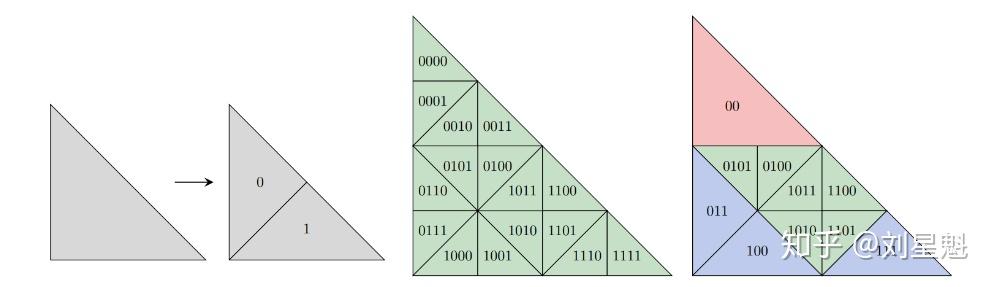
每个三角形的一组bit构成一个key,使用32-bit存储,总是在key的高一位追加一个二进制的1,作为“哨兵“,方便检测key的存储状态,如下是key 0100相关表示,MSB和LSB分别代表最高和最低有效位,不相关位使用_表示。
key中的每个bit转换成矩阵序列,从中提取出重心坐标,与原三角形顶点计算出key所对应三角形顶点。key是每个三角形的隐式表示,转换成三角形顶点则为显示几何表示。
用重心坐标计算出的三角形边中点与相机坐标计算出距离,进而计算出n个像素所占的像平面大小,n为可调整的值(以下公式中的TargetPixelSize为n)。
对于自适应细分方法,如果细分后的相邻Lod等级差1以上就会出现T-Junction的情况,会导致在平滑或置换后出现相邻块的缝隙。此方法提供了一个参数来避免这个情况,即是上面公式中的TargetPixelSize,原文测试得出值小于16时可避免缝隙且保持高度细分。
采用了Double-Buffering的设计,将Runtime计算尽可能的变成GPU-Driven形式,包括填充SubdBuffer,执行Culling,计算并填充Indirect数据等。
SubdBuffer存储了模型的Index和表示三角形的key,在Lodkernel中分三种情况:细分,保留,合并。判断当前level小于计算出的level则分成两个子key,分别写入。保留原文中使用了等于计算出的key,但是在测试时发生了key不正常更新,在实现里换成了小于父级Level+1的形式,更新正常。合并判断是否为父级的0-bit子级才写入,避免出现同样的记录造成冗余。同时还有单元测试:根节点,叶子节点。
原文中写SubdBuffer下限对应每个相邻三角形细分都差1 Level,上限则是对应均匀细分。(这里我推出的情况是[MaxLeveL+ 1,2 ^ MaxLevel],理解或有偏差)。
在计算变换矩阵的时候可能会出现精度误差,可以使用API扩展来支持double精度浮点数。
此方法在细分等级变化的情况下,会间隔地变换三角形正反面,所以正反面剔除要关闭。
这篇文章以32bit的key为示例,为了增加更多的细分等级,key可以扩展至uint2-4的形式。
原文测试环境为3.7GHz的Intel i7-8700k,8GB显存的NVidia GTX1080,TargetPixelSize设置为10。相机俯视向下正对模型,保证处理一致性。同时Shading只用单色,没有复杂的光照计算,尽可能测试本方法的性能,结果如下。
stdev代表标准差,可以看出此方法性能高效且较稳定,CPU的开销主要在Buffer数据设置和驱动管理。
Frustum Culling
基于OBB的剔除,首先将视锥体的平面法线转换到OBB空间,然后计算出最大点和最小点坐标,最后分两种情况,如果最大点到平面的距离为负,则判断模型在视锥体外被剔除,否则进一步判断最小点到平面的距离,为负则相交,为正则在内部,均保留。(如何提取FrustumPlane)
AABB则不需要转换法线,其余类似。
此本文介绍的方法可以和网格平滑技术共用。
Phong Tessellation
用于平滑网格体的内外轮廓,补足NormalMap和PhongShading无法影响轮廓效果的缺陷。
a. 在原三角形内计算重心插值坐标(Linear tessellation)
b. 计算a中插值点正交投影到每个顶点所在切平面的坐标
c. 通过b中计算的三个投影点再次计算重心插值坐标
Jad Khoury (OpenGL)
Jonathan Dupuy (OpenGL)
我的实现 (Falcor 4.0)
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK