

机器人与触觉传感技术的碰撞,一文初探人类与机器人的触觉传感
source link: http://news.51cto.com/art/202009/625620.htm
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
触摸(Touch)是人类在进行协调交互时的主要方式之一。通过触摸感知到的触觉(Sense of Touch)可以帮助人类评估物体的属性,如大小、形状、质地、温度等。此外,还可以利用触觉来检测物体的滑脱,进而发展人类对身体的认识。触觉将压力、振动、疼痛、温度等多种感觉信息传递给中枢神经系统,帮助人类感知周围环境,避免潜在的伤害。研究表明,与视觉和听觉相比,人类的触觉在处理物体的物质特征和细节形状方面更胜一筹。
与人类一样,机器人的触摸传感(Touch Sensing)能够帮助机器人理解现实世界中物体的交互行为,这些行为取决于其重量和刚度,取决于触摸时表面的感觉、接触时的变形情况以及被推动时的移动方式。只有给机器人也配备先进的触摸传感器 --- 即 “触觉传感(Tactile Sensing)” 系统,才能使其意识到周围的环境,远离潜在的破坏性影响,并为后续的手部操作等任务提供信息。然而,目前大多数机器人交互式技术系统由于缺乏对触觉传感技术的有效应用,其动作不准确、不稳定,交互过程“笨拙”,极大地限制了他们的交互和认知能力。
我们在这篇文章中重点关注人类和机器人的触觉传感问题。首先,我们讨论人类 "触觉" 的生理和编码方式,及其在传递触觉数据等任务中的重要性。然后,在分析人类触觉的基础上探讨机器人 “触觉传感” 系统的构建,特别是触摸感知(Tactile Perception)的方法和应用。最后,具体分析两篇关注在具体应用场景中向机器人引入触觉传感技术的文章。
一、人类「触觉」
首先,我们来分析人类的触觉究竟是什么。人类的 “触觉” 包括两个主要的亚型,即 “皮肤(Cutaneous)” 和“动觉(Kinesthetic)”。两者主要是基于感觉输入的部位来区分的:皮肤感觉接收来自嵌入皮肤的受体的感觉输入,而动觉感觉接收来自肌肉、肌腱和关节内的受体的感觉输入。在这两个亚型的基础上,研究人员区分定义了皮肤(Cutaneous)、动觉(Kinesthetic)和触觉(Haptic)三种感觉系统。其中,皮肤系统包括与刺激物的身体接触,并通过中枢神经系统(central nervous system,CNS)皮肤和相关体感区的受体提供对身体外表面刺激的感知;动觉系统主要来自肌肉、关节和皮肤的传入信息以及大脑可用的肌肉效能的相关联系来提供有关静态和动态身体姿势(头部、躯干、四肢和末端执行器的相对位置)的信息;触觉系统利用的则是来自皮肤和动觉系统的关于物体和事件的重要信息。
人类的触觉通过分布在全身不同密度的大量受体(如压力 / 振动的机械感受器、温度的热感受器和疼痛 / 损伤的痛觉感受器)处理对外部刺激的时空感知。对机械刺激的反应是由植入皮肤不同深度的机械感受器介导的。这些受体的分类、功能和位置如图 1 所示 [1]。这些受体具有不同的感受野(受体反应的身体区域的范围)和不同的适应率。一个快速适应(fast-adapting,FA)受体在第一次被施加刺激时就会立刻产生动作电位的爆发。相反,对于慢适应(slow-adapting,SA)受体来说,在刺激与其感受野接触的整个时期内它都是活跃的状态。对热刺激的反应被认为是由皮肤中单独的“热” 和“冷”的热受体群体介导的。此外,科学家还在体外和体内对人体皮肤样品进行了研究,发现不同受体对外界刺激的反应本质上是热电性和压电性的。

图 1. (a) 无毛皮肤切片,显示各种机械感受器的物理位置和分类;(b) 从指尖到大脑体感区的触觉信号传递;(c) 触觉信号从接触点传递到大脑过程中的功能事件,为了简单起见,信号流是单向的
从皮肤受到刺激的那一刻起直到产生感知,会发生各种复杂的机械、感知和认知现象。图 1 给出了一个事件序列示例。当皮肤与物体接触时,它会与物体表面保持一致,即保持相同的局部轮廓,从而将变形投射到大量的机械感受器(受体的一类)上。因此,每个机械感受器都能表征物体的一小部分,并将时空触觉信息编码为响应于刺激大于阈值时产生的动作电位电压脉冲的峰值。刺激的振幅随后被转换成一系列动作电位,这一步骤类似于用模数转换器将模拟信号数字化和编码过程。
时空限制和对机械刺激的敏感性直接影响人类的物体识别能力和方向敏感性等。皮肤感觉的模式感知能力受到其空间和时间敏感性的限制,因为它们在皮肤处理的早期阶段就通过时空过滤来量化信息的丢失或模糊程度。这种效应可以用来定义机器人触觉传感的 “串扰” 极限。
人类善于通过触摸来识别普通物体,而物体的材料属性、形状等线索识别的结果都是至关重要的。皮肤、动觉都有助于感知这些线索。不过,人类的触觉感知更适合于感知物体的物质属性,而不是感知物体的形状,特别是在当物体较大、超过了手指接触区域大小(7-12 mm)的情况下。不过,对手指接触区域内的物体进行形状(Shape)检测是机械感受器的一项重要功能。
此外,粗糙平滑(roughness-smoothness)是另一个重要的感知维度。神经生理学研究表明,触觉粗糙度知觉是由 SA 传入神经放电的空间变化准确预测的,因此,它是多种触觉要素的函数。
对物体滑脱(Slip)的检测可以看作是皮肤受体对运动的编码。表面和皮肤之间的滑动或相对运动对于感知粗糙度、硬度和形状非常重要。滑脱作为一种误差信号,在人的握力控制中起着重要作用。物体接触表面的触觉反馈会影响对支撑物体的力的感知。除了大小之外,力的方向对于处理形状不规则的物体同时保持所需的方向也是至关重要的。在运动控制中,触觉信息在控制伸手抓握动作的执行中起着重要作用。准确地抓住一个物体不仅需要精确地控制手指肌肉的活动强度,而且还需要精确地控制其在不同抓取阶段的时间进程或持续时间。缺乏触觉感知会延长抓握的手指张开阶段的持续时间,从而削弱抓握的控制。最后,人类通过皮肤这种介质将接触压痕转化为应力 / 应变。人体皮肤具有多层性、非线性、非均匀性和粘弹性,它是一个由肌肉和脂肪组成的可变形系统支撑的复杂结构。不同的皮肤层有不同的刚度。有了这些特性,皮肤力学就在触觉感知中发挥重要作用。
但是,需要指出的是,人是一个完整的、多层次的、综合的系统,“触觉”并不是孤立的。人类感知一个刺激物依赖的是多个感官信息的集合,如触觉、视觉、听觉等。有时,不同感觉方式的输入效果是相互矛盾的,此时,人需要判断这些不同的感觉方式所输入的信号的关系和正确性。而在更多其它的时候,人类的感知是由不同感官输入信号的综合体。即便仅涉及一个单一的输入模态,人类对一个物体的感知也可能是由于它的子模态的综合作用所得到的。多个来源的感官信息的组合与整合能力是实现稳健的人类感知的关键,因为它最大限度地利用了来自不同感官模式的信息,从而提高了感官估计的可靠性。
二、机器人「触觉传感」
对应于人的触觉,机器人的触觉传感(Tactile Sensing)系统就是一种可以通过接触来测量物体给定属性的装置或系统。一般来说,机器人的触觉感知与在预定区域内的力的测量有关。为了改进机器人的应用效果,也应当为机器人配备先进的触觉感知系统,以使其能够感知周围环境,远离潜在的破坏性影响,并为后续任务(如手部操作)提供有效信息。
机器人触觉传感有着众多应用场景:比如在操作任务中,使用触觉信息作为机器人的控制参数,例如,接触点估计信息、表面法向和曲率等;在抓握任务中,通过测量法向静态力来检测物体滑动情况,例如,将接触力的测量值用于辅助抓握力控制,这对于机器人保持稳定抓握至关重要;在机器人的灵巧操作任务中,判断施加操作用力的方向也是至关重要的,例如,通过调节法向力和切向力之间的平衡,能够保证抓握的稳定性。
图 2 给出了一个在指尖、指骨和手掌上配置触觉传感器的机器人手示例[3]。具备高空间和时间分辨率的触觉传感器为手部提供了丰富的触觉信息,进而用于辅助机器人执行复杂任务,例如,探索未知对象、工具使用和手部操作等。

图 2. 阴影灵巧手(左)被触觉皮肤覆盖(中间),以便在多个位置提供触觉信息(右侧渲染图中突出显示的绿色区域)[3]
触觉传感器也可以嵌入机器人的其他身体部位,如手臂、躯干(图 3 中 NAO 机器人示例)、腿和脚。由这些部位反馈的触觉信息与辅助机器人绕行障碍物、完成人机交互和移动等任务密切相关[3]。

图 3. NAO 类人机器人覆盖着一层多模人造机器人皮肤,提供振动、温度、力和接近信息[3]
文献 [2] 引入了触觉传感,结合传统的视觉和听觉,机器人的感知 - 控制 - 行为的架构系统以图 4 的形式展示出。其中,左侧图表示将触觉感知过程被划分为功能块,在不同的层次上描述传感过程、感知和控制行为。图 1 的右侧示出了与这些功能块相对应的硬件的结构块。传感过程(Sensing)将外界刺激(如压力、振动和热刺激)转化为触觉传感器传感元件的变化。利用嵌入式数据处理单元采集、调节和处理这些数据,然后将其传输到更高的感知层(Perception)。感知层的任务是构建用于生成感知交互对象特性(如形状和材料特性)的模型。在感知阶段,触觉还可能还会与视觉和听觉等其他感知方式相融合(Fusion)。最终,在控制层(Action)中机器人根据融合的知识执行控制命令,使用控制器完成动作。
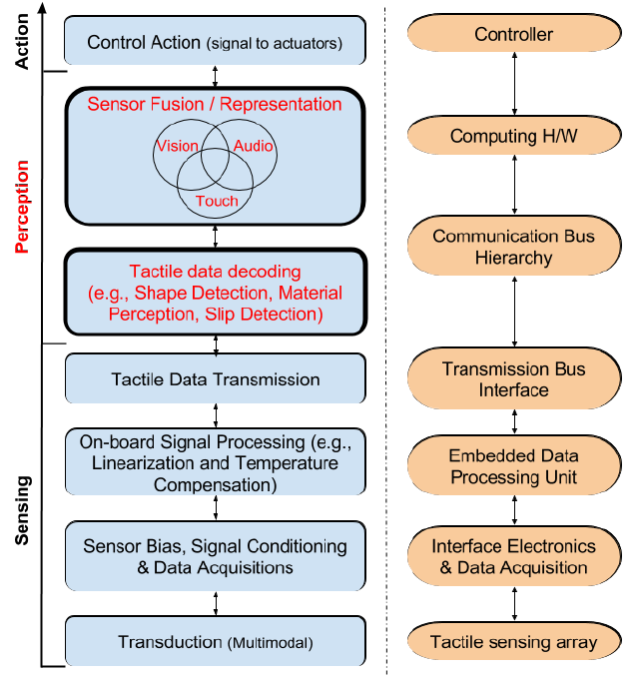
图 4. 机器人触觉传感系统的层次功能(左)和结构(右)框图 [2]
2.1 传感层(Sensing)
传感层是整个触觉传感系统中最底层的处理结构,根据传感过程对应的身体部位,主要划分为以下三类:
单点接触式传感器(类似于单触觉细胞):这种传感器用于确认物体与传感器的接触,并检测接触点处的力或振动。根据传感方式,单点接触传感器可分为:1)用于测量接触力的力传感器;2)用于测量接触过程中振动的仿生晶须,也称为动态触觉传感器;
高空间分辨率触觉阵列(类似于人类的指尖):这种类型的触觉传感器是目前触觉传感研究中采用最多的传感器,例如基于光纤的触觉传感元件的触觉阵列、基于 MEMS 气压计的触觉阵列传感器和基于嵌入式相机的指尖传感器等;
大面积触觉传感器(类似于人类手臂、背部和其他身体部位的皮肤):与指尖触觉传感器不同,这种类型的传感器并不需要强调高空间分辨率的特性。对它们来说,更重要的是足够灵活,以及可以连接到机器人弯曲的身体部位。
2.2 感知层(Perception)
触觉感知(Perception)是指通过解释和表达触觉信息来观察物体特性的过程,也是机器人触觉传感中重点关注的研究内容。由图 2 可知,感知位于传感层之上,为控制层提供有用的、面向任务的信息。与触觉传感器的快速发展相比,对触觉传感器产生信息的理解(触觉感知)发展尚不成熟。目前针对触觉感知的研究主要包括物体识别、形状识别、姿态识别、感知融合等。
[物体识别]
物体表面的材料特性是机器人与周围环境进行有效交互所需要的最重要的信息之一。视觉(Vision)一直是识别物体材料最常用的方法。然而,光凭视觉只能识别出一种已知的表面材料,而不能估计其物理参数。在这方面,必须引入触觉来判断材料特性。辅助触觉物体识别的信息包括物体的表面纹理(Surface texture)、物体刚度(Object stiffness)等。
[形状感知]
形状感知是机器人识别或重建物体形状的能力。在不同的机器人任务中,形状感知的目标不同,例如,捕捉精确的形状,形状元素或整体轮廓分类等。形状感知能力对于机器人执行任务(如抓取和手部操作)的完成效果至关重要。获得的物体形状信息越完整,机器人就越有能力规划和执行抓取轨迹和操纵策略。
经典的形状识别研究主要是基于视觉的方法。然而,当存在遮挡或光照条件较差时,机器人是无法观察到视觉形状特征的。相比之下,触觉物体的形状感知并不受这些因素的影响,可以通过传感器与物体的相互作用来判断物体的细节形状。此外,近年来高性能触觉传感器的大规模量产进一步促进了通过触觉识别物体形状的算法的推广。
形状感知算法主要包括局部形状感知和全局形状感知两类。局部形状感知类似于人类皮肤的触觉感觉,全局形状感知则是皮肤和动觉共同反馈作用的结果,例如对超出指尖范围的轮廓的感知。在一些机器人内置的内部传感器中,例如关节中的本体感受器,常被用来获取手指 / 末端执行器的位置和运动,通过将这些手指 / 末端执行器与局部特征结合起来以识别物体。
[姿态识别]
机器人实现对物体的操纵需要以精确和及时地估计物体的姿态为前提。一般情况下,使用物体(对象)相对于机器人末端效应器或全局坐标系的位置和方向描述其姿态。针对物体位置的估计即使存在很小的误差,也会导致机器人手指在物体上的位置不正确,从而产生关于抓握稳定性的错误假设,并影响操作任务的成功。因此,鲁棒、准确和快速地感知物体的姿态是任何复杂的抓取和操纵系统的关键部分。
机器人学中最常用的估计物体姿态的方法是使用计算机视觉。然而,当机器人接近要操纵的物体时,会存在遮挡的现象,进而影响视觉估计的效果。为了解决这一问题,研究人员通过引入触觉传感系统来帮助机器人确定被触摸物体的姿态。根据传感层输入的不同,姿态识别方法主要包括单点接触式传感器和触觉传感阵列。
[感知融合]
机器人必须配备不同的传感方式,才能在非结构化环境中工作。将这些不同来源的数据融合成更有意义的、更高层次的状态表征也是感知过程的一部分。多个传感器可以提供更及时、成本更低的信息。此外,由于传感器的工作速度不同,可以并行处理它们的信息。
在需要与环境交互来完成的任务中,可以将触觉感知与其他感知方式相结合,以提高任务完成的准确度和鲁棒性。典型的感知融合方式有触觉感知与视觉、动觉线索、力矩和距离感测的结合等等。
2.3 控制层(Action)
最后,我们从控制层的角度讨论触觉传感技术在机器人中的应用。丰富的触觉信息能够为执行触觉相关任务提供多种可能性,包括:触觉探索、抓取、手部操作、移动、工具操作、人机交互和无意识操作等[3]。
[触觉探索(Tactile Exploration)]
触觉探索是一种通过触觉提取未知物体属性的有效方法。人类通过多种探索方法来获得关于物体的知识,例如侧向运动、压力、封闭、轮廓跟踪、物体部分运动测试和启示性测试等。受到这些人类行为的启发,研究人员开发了多种基于触觉的探索方法用以估计机器人的控制参数,包括物体表面几何结构、材料属性、形状等。
触觉传感在机器人触觉探索中的另一个代表性应用是触觉伺服控制(Tactile servoing control),即通过单个或多个接触区域内得到的物体相关信息以确定期望的机器人与物体的接触模式(接触模式是指接触位置和力)。例如,可以使用触觉阵列通过执行滑动和滚动动作来探索物体的表面特征,从而通过最小化触觉模式的偏差来控制动作。这种方法也可用于控制机器人手进行探索,控制器利用手部多个接触区域,探索未知物体的表面,提高机器人的抓取能力。
[无意识操作(Nonprehensile Manipulation)]
无意识操作主要是指在没有明确抓取任务的情况下机器人与物体之间的交互。这种类型的操作包括推、戳、打、钩、旋转、翻转、投掷、挤压、旋转和打击等。无意识操作中的触觉感知通常用于对接触过程进行建模,并提供低水平的反馈控制,以及监控动作状态和估计物体属性等。
[抓取(Grasping)]
抓取是机器人操作中研究最广泛的一个方面,它为机器人提供了对被抓取物体的控制能力,是机器人使用工具的一个常见先决条件。与触觉探索相似,触觉抓取是提取物体属性的重要方法。触觉感知也被用于分析型抓取控制器、数据驱动抓取合成、抓取结果检测和重抓取等控制器中。分析型抓取控制器依赖于准确的接触位置、法向和力估计来计算最大化抓取质量指标的抓取姿势。而在数据驱动的方法中,机器人使用先前抓取的接触和物体信息来预测抓取质量并计算重抓取的姿势。一旦抓住了物体,触觉反馈可用于控制接触力并检测初始滑动。通过使用触觉数据检测或预测初始滑动,机器人可以自动增加抓地力以避免较大的滑动,而无需明确估计物体 - 手指摩擦系数。
[手部操作(In-Hand Manipulation)]
在手部操作中,使用机器人手的灵巧性来改变被抓取物体的状态,此时,机器人多采用的控制器包括多指机械手(Multifingered Robot Hands)、夹持器(Grippers)等。为了在保持接触的同时进行局部重新定位,首先要将物体精确地抓住,然后再使用机器人的指尖移动物体。触觉传感用于估计接触和物体信息,并主动控制手指和物体之间的接触。触觉传感也可用于直接学习从接触传感器信息到机器人手指所需关节速度的映射。
为了进一步移动物体,机器人需要用手指在不同的抓握之间进行切换,同时保持手中的物体不掉落。为此,手指需要通过触觉感应来检测手和物体之间的缝隙情况,以及接触物体的情况,从而有效地在物体表面滑动。为了更进一步的模仿人类,可以通过在受试者的手上安装触觉指套来获得带有触觉信号的滑动行为演示,用于控制机器人。
[工具操作(Tool Manipulation)]
工具操作是许多机器人操作任务中都具有的一个内容。在工具操作中引入触觉感知的一个重要前提是,任务接触必须位于物体和手持工具之间。因此,除非工具本身装有仪器,否则触点不会直接位于触觉传感器上。触觉感知可用于检测工具上的接触,定位工具提示和被操作工具的其他重要内容,监控任务进度和检测操作失败等任务。触觉反馈还可以用来估计和保持接触点的方向和力,以执行后续的控制任务。触觉感知也可用于双臂装置,以估计抓取工具的运动参数。
此外,触觉感知还可以用于控制和使用未知工具。在这类任务中,主要的挑战是没有运动学或动力学操作模型可以直接用于计算给定任务的触觉动作信息。此时,可以引入基于数据驱动的方法作为一种隐式计算操作命令的有效方法。
[运动(Locomotion)]
触觉感知不仅对完成操作任务有用,对于引导和实现机器人运动也是非常有效的。地面车辆和步行机器人,如人形机器人、四足动物、六足动物和蛇形机器人,都需要利用与环境的接触来移动。触觉感知为完成这些任务提供了对机器人状态和环境地形的估计。例如,轮式机器人可以使用触觉感知来监测它们与地面的接触。来自车轮中麦克风或加速计的振动信号可用于确定地形类型。
保持平衡是机器人站立和行走的关键部分。为了保持平衡,机器人需要使用触觉感知来估计其支撑的接触位置,以及检测可能导致其失去平衡的障碍物和其他扰动。触觉感知还可用于学习站立时的触觉运动映射。机器人步行阶段之间的转换通常由接触事件所触发,例如脚后跟与地面的接触。在这种场景中可以应用触觉感应来判断机器人的脚应该放在哪里,此时通过估计地形类型,机器人可以生成合适的步态并切换到合适的腿部控制器。
[人机交互(Human–Robot Interaction,HRI)]
除了与无生命物体和地形交互外,机器人还需要与人类进行物理交互。HRI 的应用范围广泛,包括穿上衣服、移交物品、与协作机器人的安全交互等。在这些任务中,机器人需要确保相互作用的力是安全的,并且其发出的力量能够适应人体。
最新的 HRI 研究进展是探索从触觉感知的反馈中推断人类的潜在状态和意图。例如,在移交过程中,机器人可以利用视觉和触觉反馈来确定人类何时有合适的抓地力并准备好接受对象。类似的,在执行协作任务时,如搬运大型物品,机器人通过手腕上的力 / 力矩传感器测量交互力和扭矩,以执行任务并做出相应的反应。
除了执行任务外,HRI 还可以用来教机器人从演示中获得新技能。通过这种方式,机器人可以直接由人类使用力控制器引导。例如,穿衣是日常生活中的一项基本任务,开发穿衣机器人可以为运动障碍患者提供帮助。利用触觉信息,机器人可以调整以减小对人的姿态估计中的误差,并在提供穿衣辅助的同时,实时跟踪该人的轮廓和动作。
基于前面关于人类触觉和机器人触觉传感的讨论,以下准则可以作为一般机器人系统中触觉传感设计的参考[1]:
随着功能划分的多样化和分布式接收器的出现,可以向机器人中引入不同类型的小型传感器,其中每种传感器都能以最佳方式测量特定的接触参数,例如,接触力和硬度检测、测量多个接触参数的触觉和热传感器等等。
在设计机器人的过程中,可以基于身体部位将触觉传感器的空间分辨率分布或排列成一个阵列。例如,对于指尖可以设置为 1 毫米左右,相当于指尖大小区域上大约 15×10 个元素的网格;对于手掌和肩膀等不太敏感的部分,可以设置到 5 毫米。
传感器应具有高灵敏度和宽动态范围,还应该能够测量力的方向。这一点很重要,因为一般来说,机器人并不掌握真实世界物体的先验模型。
为机器人所设计的触觉传感器应该具备快速响应的功能。如果触觉反馈用于机器人控制,这一点尤为重要。在机器人应用的控制回路中引入触觉感知是很重要的,因为从人工肌肉或动觉单独获得的接触信息不足。人体皮肤中不同的机械感受器响应的信号频率范围可用于设置传感器的响应时间要求。一般来说,对于实时接触,每个触摸元件的响应速度应为 1ms。
对于人类来说,触觉数据并不是直接发送到大脑的。相反,一些处理是在不同层次上进行的,以适应人类神经系统有限的吞吐量。因此,为了减少机器人传递到中央处理器的信息量,对于大型触觉阵列或模块来说,在感觉位置进行某种程度的预处理(数据选择、局部计算等)是很重要的。这样的架构将解放 “机器人大脑” 进行更智能的工作。或者,它可以将系统扩展到几乎任何数量的传感器中。
可以将传感器的弹性覆盖层设计成在皮肤中有中间和乳头状突起的结构。通过将应力集中在传感元件上,这种结构还可以补偿弹性材料的模糊效应。弹性材料表面的乳头状脊状纹理增加了可检测性。
生物传感器可以获得像物体的详细轮廓这样的信息,因为皮肤是柔顺的,并与物体保持一致。因此,机器人支架应坚固、灵活、舒适、可伸展和柔软,从而能够承受温度、湿度、化学应力、电场、突然力等恶劣条件。当它们分布在身体上时,生物传感器不应显著增加机器人连杆 / 部件的直径 / 厚度。
三、「触觉传感」技术应用
3.1 基于粘着控制摩擦的工业夹具的改进(Improving Industrial Grippers With Adhesion-Controlled Friction)[4]
在制造业中,有效地处理精密物体是一个具有挑战性的问题。实现稳定的抓取、同时避免施加过大的抓取力是在精密仪器处理任务重引入机器人操作的重要目标。例如,在处理易碎物品时,机器人必须将施加在抓取物体上的力降到最低,以防止损坏。再比如,处理可变形物体时,要做到不挤压就可以抓取物体,以保持物体的形状或表面特性等特征。
人类在处理类似的问题时,能够根据对物体重量和初次接触时形成的摩擦特性的估计,快速调整抓地力。针对这些刺激,人类能够做到只应用最小的力加上适度的安全空隙程度来执行基本的操作而不会滑脱。这种策略使得人能够有效地与易碎和可变形的物体进行交互。相比之下,大多数机器人很难预测和维持抓住精密物体所需的最小力。
与传统的使用专门夹具或控制方案的方法不同,本文提出了一种将壁虎式定向粘合剂粘贴到工业机器人夹持器和触觉传感器上的解决方案用以完成机器人处理精密物体的任务。作者将定向的、受到壁虎特性启发的粘合剂整合到商业夹持器的钳口中,使其能够抓住非常精细的物体,并以较小的抓握面积抵抗大的发力瞬间,具体见图 5。

图 5. 工业机器人,利用壁虎启发的粘合剂排列在抓爪垫上,可以抓握和操纵腐烂的番茄。它也可以施加相当大的扭矩,仅使用其接触面的 3/4
3.1.1 方法简述
摩擦力通常有两种:一个是由于分子的吸引力和迟滞,另一个是由于分子相互碰撞造成的。前者是一种粘附控制元件,它取决于分子尺度上的实际接触面积。后者是一个负载控制部件,它依赖于法向力。对于大多数硬材料,前一部分可忽略不计,后一部分提供了最大摩擦力,该摩擦力随施加的载荷线性增长。具体见下式:

其中,f_t 表示切向力,f_n 表示法向力,μ表示摩擦系数。对于壁虎式胶粘剂,即使在正常力的作用下,面积依赖性部分通常占主导地位。在静态条件下,期望的粘接剂的切向力为正法向力是:

其中,p(x,y)表示触点给定位置处的压力,c_1 和 c_a 为常数,A 为接触面积。同样,在静态条件下,关于垂直于指尖表面的轴的力矩应为:

其中,r=[x,y]表示从 A 的压力中心到 A 中每个元素的向量。本文工作涉及定向粘合剂,因此常数 c_a 表示粘合剂的首选加载方向与施加切向力的角度之间的函数:c_a(φ)。具体的,图 6 示出定向粘合剂的两种可能的设置方案。

图 6. 机器人从其重心处捡起物体的图画。底部:指尖覆盖 a)均匀对齐的直楔(θ=0°)和 b)楔体旋转 ±θ度的人字形图案所产生的力和扭矩。插图 c)显示了垫上壁虎材料的细节,以匹配 b)的人字形图案排列。
如果夹持器只需要在一个方向上施加切向力,例如在通过抓住物体的质心来提升物体时,使定向粘合剂与提升方向平行是最有效的方法。然而,操纵通常涉及到围绕多个轴旋转抓取的对象。此外,这些物体可能是不均匀的,或者可能无法沿着它们的中心线抓住它们。因此,如图 6 所示,单机械手的抓取尝试通常会引入与物体接触点有关的力矩。然而,当试图最小化抓取力时,有可能发生滑动。一个力矩在旋转中心周围形成一个圆形的剪切力模式,其中只有一小部分与粘合剂的最强方向对齐。
为了补偿上述效果,可以安排具有多个取向的小面积定向粘合剂。图 7 示出了几种不同模式的预期结果,假设粘合剂在φ=0 时具有最大强度,正交方向φ=±90° 处具有最小强度。图的色标与φ呈线性分布,φ被定义为粘合剂的首选方向与实际加载方向之间的夹角[见图 7(d)]。

图 7. 当产生纯逆时针扭矩(a-c)或纯向上切向力(b-d)时,直线(a-b)和定向(c-d)壁虎粘合剂设计的效率图比较。半透明箭头指示壁虎粘合剂的首选加载方向
由图 7 中还可以看出,θ通常应根据指尖的尺寸进行调整。此外,对于矩形表面上的最佳力矩补偿,无论切向力补偿如何,都应使楔块朝向如下:
其中,h_f 和 w_f 分别表示指端接触区的高度和宽度。相应地选择θ可以确保楔型与指尖的主对角线平行。
3.1.2 实验分析
本文实验采用图 8 所示的实验装置。一个 UR-5 机器人,同时手臂配备了 Robotiq 双指 85 夹持器和 FT-300 力 / 扭矩感应手腕。每个夹持手指都有一个 7×4 的触觉传感器阵列和一个有图案的定向粘合剂皮肤。这些传感器的数据与来自机器人手臂编码器的位置和速度信息相结合,提供了机器人抓取的动态和静态的完整图像。作者在实验中,制作了一组特殊的粘合表面,以实现上文介绍的微型楔块的对角线 “人字形” 图案。

图 8. 机器人抓取实验装置
实验中制作了多个壁虎粘合剂面板,面板两半的方位角以 7.5° 增量变化,从θ=0° 到θ=45°,即从完全垂直于力线(Line of Force)到远离力线 45° 的位置。接下来,使用每套壁虎胶覆盖的面板进行各种实验。实验中设计了机器人手臂的两种运动模式。每次运行时,亚克力板上的标称接触面(Nominal Surface Contact)逐渐增加,从 25% 开始,然后到 50%、75%,直至最后 100% 覆盖(通过手动测量和预先编程的抓取点进行调节)。
实验过程从一块大约四分之一英寸厚的刚性附着的丙烯酸板开始。实验要求是,在规定的正常力水平下,用涂有粘合剂的两指夹持器捏住。在实验过程中,通过调节夹持器的闭合设定值,可以改变该夹持力。作者在实验中发现,对可用设定值的离散化处理使得在饱和致动器和传感器之前只能在四种确定的、不同的法向力之间变化,而其中只有三种可以被调节到低压范围内。在完成这种捏合之后,第一种运动模式是向上拉动刚性连接的丙烯酸板,从而在指尖的粘合表面上施加纯剪切力。第二种运动模式是围绕接触面的质心旋转,这样一个纯力矩就被施加在指尖的粘合剂上。
本文实验给出了一个法向应力和剪切应力的离散化结果,对应于触觉阵列中的单元数 N,每个区域 a_t 具有:

其中,P_i 表示每个压电传感器的压力,F_T 表示由手腕上的力 - 力矩传感器测量得到的切向力。图 9(a)给出了每一组测试的图案粘合剂的最大剪切应力和法向应力之间的关系。最大切向力支撑通常采用无角楔块(在这种情况下,θ=φ=0°)。拟合幂函数清楚地显示了如下趋势:随着θ的增大,最大容许剪切应力持续降低,逐渐改变了楔体的方向。此外,触觉图像的标准化中心力矩由以下公式给出:

其中,{x_i, y_i}表示压电传感器 i 相对于质心的坐标。上式中分子是每个压电传感器对腕部总测量力矩的贡献之和,分母是压电传感器和质心之间的平均距离。对分子进行标准化处理,以便在具有不同接触面积值的数据之间进行更好的比较。标准化力矩由下式得出:
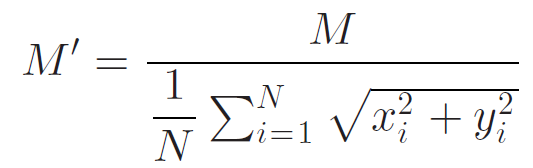
其中,M 是力扭矩传感器测量的力矩。图 9(b)示出了不同θ值的最大归一化力矩与触觉图的归一化中心力矩之间的关系。与前面的情况相反[图 9(a)],最大允许力矩随着θ而增大。考虑到实际接触面积(A_r)对压力的依赖性,曲线具有非线性性质。

图 9. 机器人抓取实验结果。(a) 运动 1:最大剪切应力(τ)是不同θ值下法向应力(σ)的函数。其中,对于每个 angle.s 数据集,一个幂函数(y=ax^b)与实验数据相匹配,以显示总体趋势;(b) 运动 2:最大规范化扭矩(M),作为不同θ值的归一化法向应力(μ)的函数
3.1.3 小结
由本文的工作可知,通过预先了解夹持器的性能,引入触觉传感装置,能够有效将抓握力的精确应用与壁虎胶接触性能的改进结合起来,进而减少对夹持器控制器本身的要求。例如,可以使用较小的控制器,从而使机械臂上的工具更轻、更安全。这种改变对协作机器人的实际应用是非常有利的。
关于后续工作,作者认为主要有三个方向:一是,需要针对其它材料和粗糙度的面板进行测试,以验证本文实验中观察到的趋势是否依然成立;二是,在非平面抓取的理想工作条件下,性能会出现多大程度的下降;三是,可以对动态情况下的抓取效果进行测试,从而验证在复杂条件下的操作任务完成情况。
3.2 基于接触反馈和 GPU 加速机器人仿真的手持式目标姿态跟踪(In-Hand Object Pose Tracking via Contact Feedback and GPU-Accelerated Robotic Simulation)[5]

机器人能够灵巧的进行操纵,得益于其对手持物体姿势的稳健估计。然而,由于存在严重的遮挡问题,在机器人手握住和操纵物体时,很难跟踪物体的姿态。为了解决机器人操作过程中的手持式(In-Hand)目标跟踪问题,本文提出将一个 GPU 加速的高保真物理模拟器 [6] 作为前向动力学模型与基于样本的优化框架相结合,以跟踪具有接触反馈的物体姿势(如图 10 所示)的方法。该方法将机器人控制器发送到一个 GPU 加速物理模拟器中,该模拟器并行运行许多机器人的状态模拟运算,每一个都有不同的物理参数和扰动的物体姿态。将观察成本(如来自真实世界和模拟的接触反馈等)传递给基于样本的无导数优化器,该优化器定期更新所有模拟的状态和参数,以更好地匹配真实世界。在任意时刻,该方法都最终选择代价最低的仿真姿态作为当前目标的姿态估计。
无导数优化是数学优化中的一门学科,它不使用经典意义上的导数信息来寻找最佳解:有时,关于目标函数 f 的导数的信息不可用,不可靠或不切实际。比如本文就用取样 (Sampling) 来更新和优化函数值。

图 10. 手持式目标姿态跟踪框架
3.2.1 方法简述
首先,作者定义了机械手在物体操纵过程中对手持物体姿态的跟踪问题。在某个时刻 t,对象的姿势表示为 p_t。作者首先定义一个物理动力学模型 s_(t+1)=f(s_t,u_t,θ),其中 s_t 表示世界状态(刚体的位置和速度,以及关节体中关节角的大小),u_t 表示机器人控制器(使用期望的关节位置作为动作空间),θ表示模拟的固定参数(如质量和摩擦力)。
对于仿真模型 f,给定初始值 p_0、s_0、θ,只需要回放仿真中机器人的动作序列 u_t 来估计姿态。然而,由于前向模型不完善,姿态的初始值有噪声,可以通过引入观测反馈(触觉感知的一种方式)来改进姿态估计。令 D 表示机器人关节的数目,L 为它的接触传感器的数目。将观测向量 o_t 定义为机器人 q_t 关节位置配置值的串联结果,以及如下定义:R_t(位于指尖上)、感应接触的力矢量 c_t、接触面 d_t 上的平移滑移方向上的单位矢量,以及接触面 R_t 上的旋转滑移的二元方向,其中 l 表示第 l 个接触传感器。一般的手持式姿态估计问题是:给定当前和过去的观测值 o_(1:t),机器人控制器 u_(1:t),以及初始姿态 p_0,找到当前物体最可能的姿态 p_t。完整流程见算法 1。

首先,通过一个基于视觉(Vision)的物体姿态估计器来估计物体的初始姿态。然后,在给定初始目标姿态估计和机器人配置值的情况下,初始化 K 个并行仿真,并在每一个时间步长 t 内将真实的机器人动作 u_t 复制到所有 K 个仿真中。给定一个成本函数 C,当前时间 t 的最佳姿态估计是第 i 次模拟的姿态(p_t)^(i* ),其中第 i 次模拟是在过去某个时间窗口 t 中产生最低平均成本的模拟:

使用成本定期更新仿真及其参数,从而可以更好地与真实的机器人对象系统对齐。期望的代价函数与手持式操作的对象姿态差异相关,因此,较低的成本即对应于较好的姿态估计。本文使用的成本函数的形式如下:

对于成本函数中的第一项(比较模拟环境和真实世界机器人之间的 q_t)的作用在于,即使它们共享相同的 u_t,依赖于与机器人手接触的物体当前姿态施加的碰撞约束不同,q_t 也可能会不同。在上式中,如果接触式传感器的力的值大于阈值,则该传感器处于接触状态。当第 i 次仿真的第 l 个接触传感器的二元接触状态与真实接触传感器的接触状态一致时,α_(i,l)为 1,否则,α_(i,l)为 0。类似的,当第 i 次仿真的第 l 个接触传感器与实际接触传感器在是否发生平移滑动的状态方面都是一致的,β_(i,l)为 1,否则,β_(i,l)为 0。γ_(i,l)表征旋转滑动的类似情况。设置成本项的权重 w_s,使每个项的相应平均量大致归一化为 1。
然而通过仿真进行目标姿态估计存在两个不确定性:一是,基于视觉的姿态估计器的初始姿态估计 p_0 是有噪声的;二是,模拟的和真实世界的动力学之间存在不匹配的问题,这些不匹配一部分是由于不完善的建模所造成的,而另一部分则是由未知的真实世界中的物理参数引起的。
为了解决第一个问题,作者通过从以视觉为中心的估计姿态分布中采样的方式,来实现在不同的模拟中扰动生成初始姿态估计:

此外,作者还增加了模拟次数 K(本文实验中 K=40)。当 K 值足够大,那么真实的初始姿态很有可能在一组仿真中得到充分的表示,之后通过优化代价函数就能够找到这个正确的姿态进行仿真。
为了对初始对象姿态进行采样,作者分别对平移和旋转的状态进行采样。其中,平移从各向同性正态分布中采样,而旋转采样通过在 so(3)中绘制零均值、各向同性切线向量来实现,之后将其应用于平均旋转中。
SO(3)是包含旋转矩阵 R 的一种特殊正交群,一般称之为三维旋转群。在三维空间中,三维旋转群组表示能在合成算子的作用下,围绕原点旋转的群组。旋转能保持被旋转向量的长度和相对矢量方向,同时是线性的。在机器人学中,这种旋转十分重要,它能标志刚体在三维空间中的旋转:刚体精确地要求在运动时保持刚体内部的距离、角度和相对方向,否则,就不能能称为刚体。
为了解决第二个问题,作者提出使用无导数、基于样本的优化算法在姿态跟踪过程中调整模拟和真实世界的动力学之间存在的不匹配。具体地说,在每个 T 时间步长之后,将在这个窗口期间所有模拟的平均成本,以及模拟状态、参数传递给指定的优化器。优化器使用自己更新的参数确定下一组仿真。下一个集合中的模拟是从当前集合的模拟中取样的,并对模拟参数和对象姿态添加一些扰动。这种探索过程保持了仿真的多样性,防止了由于观测噪声而陷入次优的仿真参数或状态。
最后,为了优化 K 模拟的参数,使其模拟状态更接近真实世界,作者提出并评估了三个无导数、基于样本的优化器。
1)加权重采样(Weighted Resampling ,WRS): WRS 基于现有的模拟状态 s^(1:K)构建了一个概率质量函数(Probability Mass Function,PMF),并从该分布中抽取 K 次替换,以形成下一组模拟。为了形成 PMF,WRS 在模拟成本上应用 softmax:

其中,λ它决定了分布的清晰度。重新采样后,通过扰动模拟参数和对象姿态对所有模拟进行探索。
2) 相对熵策略搜索(Relative Entropy Policy Search,REPS): 本文使用基于样本的 REPS 变量来计算每个模拟的权重,并从这些权重的 softmax 形成的分布中进行采样。WRS 使用一个固定的参数λ来构造分布,REPS 求解自适应温度参数η,该参数在旧样本分布和更新样本分布之间的 KL 散度约束条件下,能够较好地改善总体分布的性能。为了使用 REPS,利用下式将代价重构为奖励:

通过优化一个对偶函数 g(η)来计算η,之后使用η构建 REPS

重采样后,会以与 WRS 相同的方式对每个模拟进行扰动处理。
3) 基于群体的优化(Population-Based Optimization,PBO):受基于人群的训练(Population-Based Training ,PBT)方法启发[7],PBO 首先根据平均成本对所有模拟进行排序,并找到成本最低的最优 K_best 模拟。然后,通过将剩余的 K-K_best 模拟替换为 K_best 模拟的副本,并对其进行替换取样后再进行利用。最后,仍然以与 WRS 相同的方式对 K_best 模拟进行扰动处理。
3.2.2 实验分析
作者使用由 Allegro Hand 搭配 Kuka IIWA7 的机械手臂,通过仿真和真实世界的实验来评估本文提出的方法的性能。在仿真实验中,首先用手跟踪操作系统采集手部目标的操纵轨迹,然后通过离线运行本文提出的算法来评估姿态估计误差。对于真实世界的实验,作者使用 PoseRBPF[8],一种最新的基于 RGB-D 的粒子滤波的姿态估计算法来获得物体的初始和最终姿态,同时将这些初始和最终目标姿态视为真实值,并将最终姿态与本文提出的算法预测的姿态进行比较。
作者将 4 指 16 自由度的 Allegro Hand 安装在 7 自由度 Kuka IIWA7 机器人手臂上。为了获得真实世界中的接触反馈,将 SynTouch BioTac 传感器连接到每个指尖。
实验中使用耶鲁 - 哥伦比亚大学 - 伯克利分校(Yale-Columbia-Berkeley,YCB)对象数据集中的 3 个对象(垃圾邮件罐、泡沫砖和玩具香蕉),以及文献 [9] 中发布的数据集中获得的模型、纹理和点云。之所以选择这些物体,是因为它们适合 Allegro Hand 的大小,而且足够轻,因此可以形成坚固的精密抓握(作者清空了垃圾邮件罐,以减轻其重量)。
对于每一个目标对象,在模拟实验和真实世界的实验中,作者给出了两种操作轨迹的演示:1)用手指抓握和手内物体旋转来拾取和放置,以及 2)相同的操作但在抓取过程中指尖断开并重新建立接触(手指转动)。演示给出了总共 24 条轨迹,用于模拟和真实世界实验的分析。在这两种操作的轨迹类型中,目标对象都会因惯性力和与工作台的推力接触而发生平移和旋转滑动。每个轨迹持续一分钟左右。假设可以在大约 30Hz 的频率下运行姿态估计算法,最终得到的每个轨迹总共大约 2k 帧。除了本文建议的优化器(WRS、REPS、PBO),作者还评估了以下两个基线方法:开环(Open Loop,OLP)和标识(Identity,EYE)。OLP 使用 1 个模拟来跟踪对象的姿势。EYE 使用一组有噪声的初始姿态进行初始化,并且总是选择成本最低的模拟姿态,但它不执行任何重新采样或优化器更新处理。最后,本文使用平均距离偏差(Average Distance Deviation,ADD)作为评估指标。ADD 计算真实姿势和预测姿势的对象点云中相应点之间的平均距离。
图 11 给出模拟环境中的实验结果。其中,黑色垂直线的长度表示 1 个标准偏差。优化方法通常具有较低的平均值和方差,但它们的相对排序取决于初始姿态噪声的大小。REPS 和 PBO 分别在 5.8mm 和 5.9mm 的中等噪声条件下获得了最佳的 ADD 性能。由图 11 可知,ADD 随着初始姿态误差的增加而增大,而基于优化器方法的 ADD 值相对较小。虽然 EYE 有时可以获得与使用优化器的方法相当的效果,但后者通常具有较小的误差方差和较大的误差。在中等噪声的情况下,REPS 和 PBO 的最优 ADD 值分别为 5.8mm 和 5.9mm。

图 11. 在所有模拟实验中,不同优化器对初始姿态噪声水平的姿态跟踪误差比较
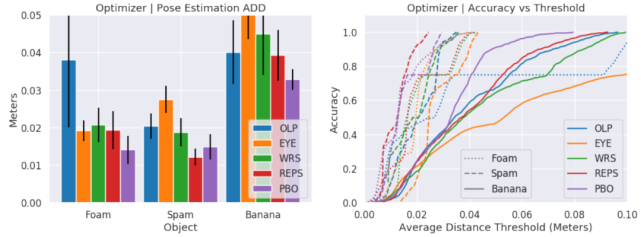
图 12. 真实世界中 3 个物体的姿态跟踪实验
图 12 给出真实世界中的实验结果。其中,ADD 值比模拟环境中实验的结果 ADD 值都要高,一方面,这是由于与具有不同参数的仿真相比,真实世界的动力学与仿真之间的差异更大;另一方面,真实世界中的观察值存在比模拟环境中更严重的噪声问题。由图 12 可以看出,没有优化器能够有效跟踪玩具香蕉的真实数据,由于物体(香蕉)的长力臂和低摩擦系数,使得其滑动行为难以精确建模。这是本文算法的一种失败模式,如果所有的模拟都发散,那么算法将无法在随后的优化程序更新中恢复。
3.2.3 小结
本文提出了一种基于样本的优化算法,通过接触反馈和 GPU 加速机器人仿真来跟踪手部目标的姿态。并行仿真同时保持了对真实世界和模型对象姿态变化的多种状态估计,这些变化是由复杂的接触动力学引起的。优化算法在目标姿态跟踪过程中调整仿真参数,进一步提高跟踪性能。在未来的工作中,作者计划向优化的循环中引入接触传感(Contact Sensing)与基于视觉的姿态跟踪。
四、文章小结
本文对人类和机器人的触觉传感知识进行了简单的梳理和探讨,并以此为基础给出了两篇论文中的应用实例。针对人类如何运用触觉信号来探索、感知,以及学习如何操纵、控制物体,研究人员已经进行了大量的深入分析。然而,生物系统处理感官信息以控制行为的方式,未必总是适合直接应用于机器人的工程解决方案中。不过,它们提供了关于行为生物体如何对动态变化的环境做出反应的参考,也提供了一个机器人开发和应用的多层次概念框架。研究人员可以在这个框架内进行对机器人系统传感器的总体设计。
系统的整体性能不仅取决于单个系统元素的独立质量,还取决于它们的集成方式。用亚里士多德的话来说,“整体比它的某些部分更重要(“the whole is more than some of its parts )。”在设计触觉传感设备时,考虑到各种系统约束对于最终实现机器人的自动控制非常有用。这就需要在不同的层次上理解传感器系统的体系结构,从感知外部刺激到刺激的结果。在将人工触觉传感技术应用于真实世界环境之前,还需要进行大量的系统级工作。这将为今后开发实用、经济的触觉传感系统奠定基础。将触觉传感器有效地应用于机器人中,不仅可以促进机器人学的研究,还将有助于理解人类与环境的相互作用。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK