

Experiments on Hyperparameter tuning in deep learning — Rules to follow
source link: https://towardsdatascience.com/experiments-on-hyperparameter-tuning-in-deep-learning-rules-to-follow-efe6a5bb60af?gi=19b70aeec40a
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
Experiments on Hyperparameter tuning in deep learning — Rules to follow
Mar 16 ·6min read

{kind=link}
Any Deep Learning model has a set of parameters and hyper-parameters. Parameters are the weights of the model. These are the ones that are updated at every back-propagation step using an optimization algorithm like gradient descent. Hyper-parameters are set by us. They decide the structure of the model and the learning strategy. For example — batch size, learning rate, weight decay coefficient (L2 regularization), number and width of hidden layers and many more. Because of the flexibility deep learning provides in model creation, one has to pick these hyper-parameters carefully to achieve the best performance.
In this blog, we discuss
1. General rules to follow while tuning these hyper-parameters.
2. Experiment results on a data-set to verify these rules.
Experiment Details
Data —
The experiments were performed on the following dataset . It contains images of 6 classes — buildings, forest, glacier, mountains, sea, streets. Each class has roughly around 2300 examples. The test set consists of roughly 500 examples of each class. The train and test sets are both fairly balanced. 
Hardware —
NVIDIA 1060 6GB GPU.
Model used —
1. For experiments on learning rate — ResNet182. For experiments on batch size, kernel width, weight decay — Custom architecture (see code).
Observations Recorded —
1. Train and test loss at each epoch2. Test accuracy at each epoch
3. Average time for each epoch (train and inference on the test set)
Hyper-parameters and their effect on model training
We take an example of a Convolutional Neural Network (CNN) to relate model behavior and hyper-parameter values. For this post, we discuss the following — Learning rate, batch size, kernel width, weight decay coefficient. But before we discuss these general rules, let’s revisit our goal for any learning algorithm. Our goal is to reduce train error AND the gap between train error and test/validation error . We achieve this by tuning the hyper-parameters

Let’s look at how deep learning literature describes the expected effect of changing hyper-parameter values
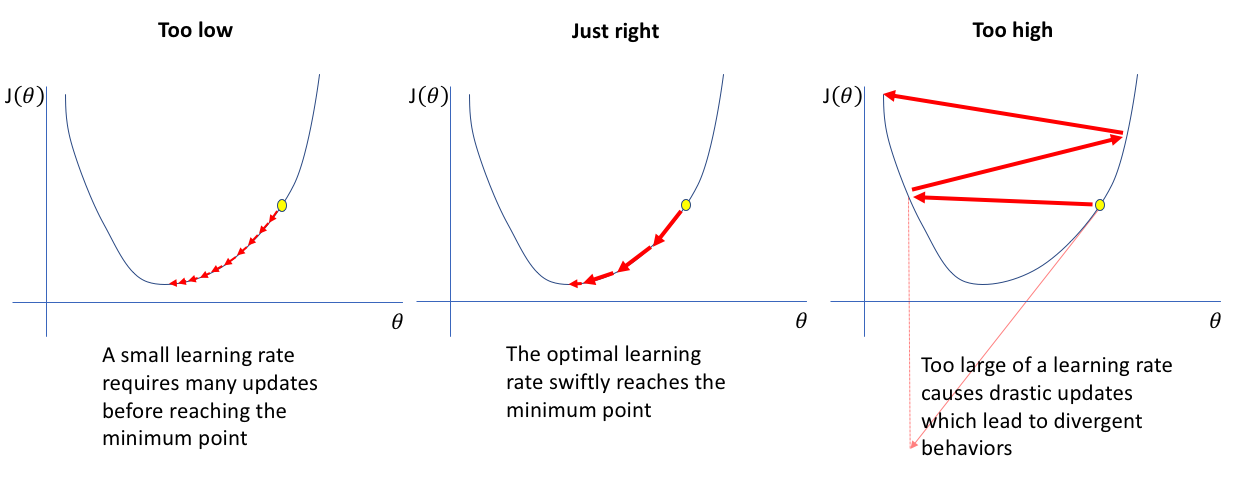
Learning Rate
The Deep Learning book says —
If you have time to only tune one hyper-parameter, tune the learning rate
In my experiments, this certainly holds. After trying three learning rates, I found that too low or too high value heavily degrades the performance of the algorithm. For a learning rate 10^-5, we achieve a test accuracy of 92% For the rest two rates, we barely cross 70% All other hyper-parameters are kept constant.

If you look at the error plots, there’s something to observe. For example in the training error —

As expected, all three decrease. But at the lowest learning rate (in pink), the loss at the 10th epoch is greater than the loss for the red curve at the first epoch . With extremely low learning rates, your model learns real slow. Also, at high learning rates, we expect the model to learn faster. But as you can see, the lowest train error on the red curve is still greater than the error on the orange curve (moderate learning rate). Now let’s look at the test error —

A couple of observations. For the lowest rate, the test loss decreases steadily and doesn’t seem to have reached the lowest point yet. Meaning the model has under-fit and perhaps needs more training.

{kind=link}
The red curve shows unusual behavior. One may suspect that due to the high learning rate, the optimizer couldn’t converge to a global minima and kept bouncing on the error landscape.
For the moderate curve (orange), the test error starts to increase slowly after the first epoch. This is a classic example of overfitting .
Batch Size
If you are familiar with Deep Learning, you must have heard of Stochastic Gradient Descent (SGD) and batch gradient descent. To revisit, SGD performs a weight update step for each data-point. batch performs an update after averaging gradients from the data-point in the entire training set. According to Yann LeCun
Advantages of SGD —
1. Learning is much faster
2. Often achieves a better solution
3. Useful for tracking changes.
Advantages of batch learning —
1. Conditions of convergence are well understood.
2. Many accelerated learning techniques like conjugate gradients are well understood in batch learning.
3. Theoretical analysis of weight dynamics and convergence rates are much simpler
Using a method somewhere in between, mini-batch gradient descent is popular. Instead of using the entire training set to average the gradients, average over gradient of a small fraction of data-points is used. The size of this batch is a hyper-parameter.
To illustrate, consider the loss landscape as shown in the figure below

The diagonal lines with numbers on them are loss contours. The x and y-axis are two parameters (say w1 and w2 ). Along a contour, the loss is constant. For example, for any w1 and w2 pair lying on a line with loss 4.500, the loss is 4.500. The blue zig-zag line is how an SGD would behave. The orange line is how you expect a mini-batch gradient descent to work. The red dot represents the optimal value of the parameters, where the loss is minimum.
The book Deep Learning provides a nice analogy to understand why too-large batches aren’t efficient. The standard error estimated from n samples is σ/√ n. Consider two cases — one with 100 and another one with 10000 examples. The latter requires 100 times more computation. But the expected reduction in standard error is just by a factor of 10
In my experiment, I changed the batch-size. The test accuracy I obtained looked like —

Kernel Width
Convolution operation in CNN’s involves a kernel extracting features from a feature map. The kernel is made up of learned parameters. In 2-D convolutions, a kernel is an N*N grid, where N is the kernel width.
Increasing or decreasing the kernel width has its pros and cons. Increasing the kernel width increases the parameters in the model, which is an obvious way to increase the capacity of the model. It’s hard to comment on the memory consumption because the increased number of parameters increases the memory usage, but the output dimensions of the feature maps are smaller which decreases the memory usage.
Weight decay
Weight decay is the strength of L2 regularization. It essentially penalizes large values of weights in the model. Setting the right strength can improve the model’s ability to generalize and reduce overfitting. But a value too high will lead to severe underfitting. For example, I tried a normal and extremely high value of weight decay. As you can see, the learning capacity is almost none when this coefficient is set poorly.

Conclusion
The experiments fairly confirmed most of our hypotheses. A poorly tuned complex model like ResNet18 can easily perform worse than a well-tuned simple architecture. The loss curve is a good starting point to investigate the impact of hyper-parameters
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK