

Meta用一个头显搞定全身动捕,无需手柄和下身传感器,网友:VR终于少点物理挂件了
source link: https://www.qbitai.com/2022/09/38177.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
Meta用一个头显搞定全身动捕,无需手柄和下身传感器,网友:VR终于少点物理挂件了

“元宇宙终于要有腿了”
萧箫 发自 凹非寺
量子位 | 公众号 QbitAI
还记得你玩VR的时候,完全看不到自己下半身的样子吗?

毕竟,目前的VR设备通常只有手柄和头显,没有下半身传感器,系统无法直接判断下半身的动作,预测时也容易出bug。
现在,Meta终于迈出了一大步——只凭头显(甚至不用手柄),就能搞定全身动捕,连双腿的不同动作都预测得一清二楚!
新研究一po出就在网上爆火。
有网友调侃,小扎的元宇宙终于要有腿了,顺手还po了个Meta的股票。
还有VR玩家感到高兴:玩游戏时终于可以在身上少挂点硬件了!
这项研究究竟是如何只用头显做到全身动捕的?
给强化学习AI搞个物理约束
研究人员设计了一个框架,以头显(HMD)和手柄控制器的位置和方向数据作为输入,其他数据全靠AI预测。
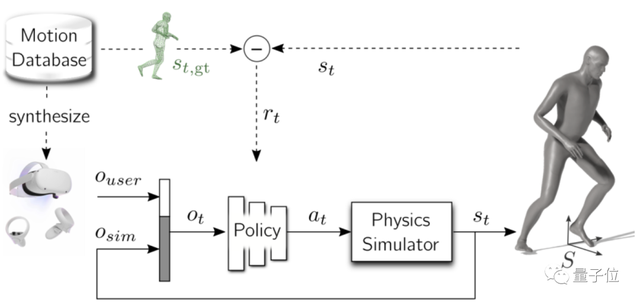
为此,他们先基于强化学习训练了一个策略(policy,基于三层MLP),根据仅有的HMD和手柄数据,尽可能逼真地还原真实动作捕捉的姿势(动捕数据一共10小时)。
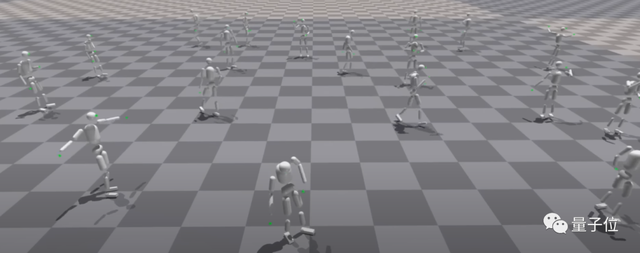
他们搞了4000个身高不同的仿真人形机器人,每个机器人具有33个自由度。
随后,将这些机器人在英伟达的Isaac Gym(一个专门用于强化学习研究的机器人物理模拟环境)中同时进行训练,比单个环境下训练一个机器人要更快。
在物理环境中一共训练了2天(约140亿步)后,这只框架就能基于这个强化学习策略,根据头显和手柄数据直接预测用户全身动作了——
包括慢跑、行走、后退或过渡动作(transition)等。
不仅如此,Isaac Gym还允许添加其他不同的模拟对象,因此还能通过训练环境复杂度以增强动作真实性。
例如,根据虚拟环境中新增的皮球,模拟出“踢”的交互动作:
所以,相比其他模型,为什么这个框架预测的效果更好?
(此前虽然也有手柄和头显预测全身姿态的AI,但预测全身动作时往往会出现身体不自然抖动、走路时脚像是在“滑冰”、接触力不稳定等bug)
Meta研究人员分析后认为,此前模型难以准确预测下半身姿态的原因,是预测时上下半身的关联度较小。
因此,如果在预测时增加一定的物理约束(人体力学),例如惯性平衡和地面接触力等,就能让预测精度更上一层楼。

△脚上的红色直条大小表示接触力大小
研究人员还进一步发现,即使不用手柄控制器,只需要头显的60个姿势(包含位置和方向数据),就足以重建各种运动姿态,还原出来的效果同样没有物理伪影。
除此之外,由于这个策略是基于4000个身高不同的仿真人形机器人训练,因此它也能自动根据用户的不同身高来调整策略(具有基于动捕的重定向功能)。
不过,也有网友好奇他为什么要采用强化学习来预测运动姿态,毕竟当前监督学习是主流方法。
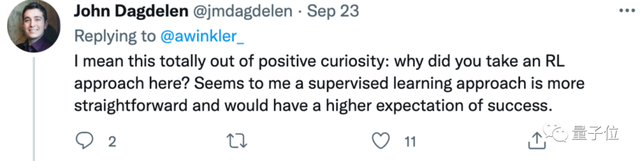
对此作者回应称,强化学习更方便加入物理约束(即降低抖动、脚滑等bug的关键原因),但对于监督学习来说,这通常是个难点。
但研究人员也表示,目前这个框架还有一定限制,如果用户做的动作不包含在训练数据中(例如快速冲刺)、或是进行了某些过于复杂的交互,那么虚拟环境中的仿真机器人就可能当场跌倒、或出现模拟失败的情况。
三位作者都来自Meta。

一作Alexander W. Winkler,目前是Meta Reality Lab的研究科学家,研究方向是非线性数值优化、高自由度运动规划、基于三维物理的仿真和可视化等。
他本硕毕业于德国卡尔斯鲁厄理工学院(KIT),博士毕业于瑞士苏黎世联邦理工学院(ETH)。

Jungdam Won,目前是Meta AI Lab的研究科学家,本科和博士毕业于韩国首尔大学计算机科学与工程系,研究方向包括强化学习中智能体的控制和交互,以及通过机器学习方法优化动作捕捉等。

Yuting Ye,目前是Meta Reality Lab的研究科学家,参与过Quest和Quest 2的手柄跟踪功能研发,本科毕业于北京大学,并在弗吉尼亚大学获得硕士学位,博士毕业于佐治亚理工学院,研究方向是动作捕捉和元宇宙等。
论文地址:
https://arxiv.org/abs/2209.09391
参考链接:
https://twitter.com/awinkler_/status/1572968904401776641
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK