

二次型问题的求解 C++和Matlab
source link: https://charon-cheung.github.io/2022/07/20/%E8%B7%AF%E5%BE%84%E8%A7%84%E5%88%92/Minimum%20Snap%E7%AE%97%E6%B3%95/%E4%BA%8C%E6%AC%A1%E5%9E%8B%E9%97%AE%E9%A2%98%E7%9A%84%E6%B1%82%E8%A7%A3%20C++%E5%92%8CMatlab/#python
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
二次型问题的求解 C++和Matlab
二次规划的一般形式可以表示如下,这也是Matlab中的表示形式
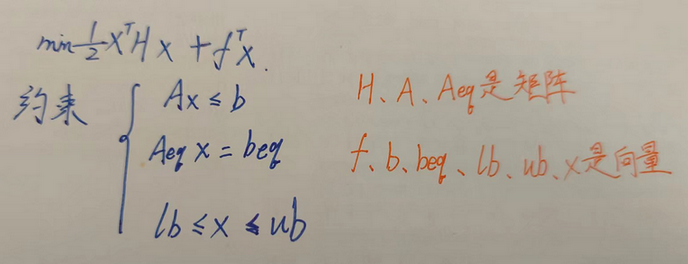
其中x为n维的输入变量,H为n×n维的对称矩阵,f为n维向量。 A是m×n维向量,b是m维向量。二次规划的要求就是在该限制条件(约束)下找到一个n维的向量X,使得f(X)的值最小。
如果H是半正定矩阵,那么f(X)是一个凸函数。
如果H是正定矩阵,那么全局最小值就是唯一的。
如果H=0,那么f(x)只剩线性部分,二次规划问题就变成线性规划问题。
如果至少有一个向量x满足约束而且f(x)在可行域有下届,二次规划问题就有一个全局最小值X。
对于维数较低情况,把二次型表达式转为矩阵形式比较简单,矩阵H的元素是二次型中的矩阵元素大小的两倍。 设矩阵H第i行第j列的元素大小为H(i,j),二次项 xixjxixj 的系数为a(i,j),则
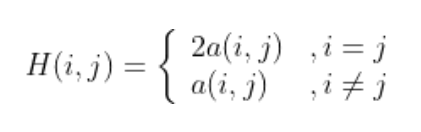
也就是平方项的系数对应矩阵H的对角元素,可以直接写出。
如果表达式太复杂,无法直接手写,使用Matlab求海森矩阵获得
syms x1 x2;
f = 0.5*x1.^2+x2.^2-x1*x2;
H = hessian(f, [x1, x2]);
% 转换为double类型
H = double(H);
% 输出矩阵
disp(h)
C++的求解使用osqp-eigen库
#include "OsqpEigen/OsqpEigen.h"
#include <Eigen/Dense>
#include <iostream>
int main()
{
// allocate QP problem matrices and vectores
Eigen::SparseMatrix<double> hessian(2, 2); //P: n*n正定矩阵,必须为稀疏矩阵SparseMatrix
Eigen::VectorXd gradient(2); //Q: n*1向量
Eigen::SparseMatrix<double> linearMatrix(2, 2); //A: m*n矩阵,必须为稀疏矩阵SparseMatrix
Eigen::VectorXd lowerBound(2); //L: m*1下限向量
Eigen::VectorXd upperBound(2); //U: m*1上限向量
// 注意稀疏矩阵的初始化方式,无法使用<<初始化
hessian.insert(0, 0) = 2.0;
hessian.insert(1, 1) = 2.0;
std::cout << "hessian:" << std::endl << hessian << std::endl;
gradient << -2, -2;
// 注意稀疏矩阵的初始化方式,无法使用<<初始化
linearMatrix.insert(0, 0) = 1.0;
linearMatrix.insert(1, 1) = 1.0;
std::cout << "linearMatrix:" << std::endl << linearMatrix << std::endl;
lowerBound << 1, 1;
upperBound << 1.5, 1.5;
// instantiate the solver
OsqpEigen::Solver solver;
// settings
solver.settings()->setVerbosity(false);
solver.settings()->setWarmStart(true);
// set the initial data of the QP solver
// NumberOfVariables 与 NumberOfConstraints 跟 Hessian 矩阵的维数对应上
solver.data()->setNumberOfVariables(2); //变量数n
solver.data()->setNumberOfConstraints(2); //约束数m
if (!solver.data()->setHessianMatrix(hessian) || )
return 1;
if (!solver.data()->setGradient(gradient))
return 2;
if (!solver.data()->setLinearConstraintsMatrix(linearMatrix))
return 3;
if (!solver.data()->setLowerBound(lowerBound))
return 4;
if (!solver.data()->setUpperBound(upperBound))
return 5;
// instantiate the solver
if (!solver.initSolver())
return 6;
Eigen::VectorXd QPSolution;
// solve the QP problem
if (!solver.solve())
{
return 7;
}
QPSolution = solver.getSolution();
std::cout << "QPSolution" << std::endl
<< QPSolution << std::endl; //输出为m*1的向量
return 0;
}
结果为 1.0003, 1.0003
Matlab
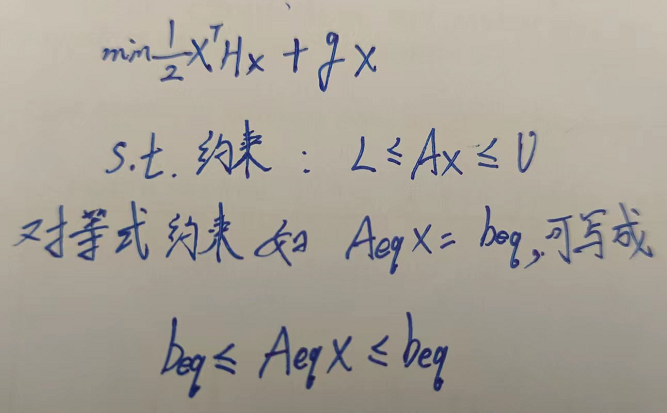
x = quadprog(H,f,A,b,Aeq,beq,lb,ub) 在满足 lb ≤ x ≤ ub 的限制条件下求解上述问题。输入 lb 和 ub 是由双精度值组成的向量,这些限制适用于每个 x 分量。如果不存在等式约束,请设置 Aeq = [] 和 beq = []
H = [2 0; 0 2];
g = [-2; -2]
A = [1 0; 0 1];
b = [1.5; 1.5];
lb = [1; 1];
[x,fval,exitflag,output,lambda] = quadprog(H,g,A,b,[],[],lb);
结果直接为 1.0000, 1.0000. 比osqp-eigen更精确。
x是解。 fval是解处的目标函数值
python
OSQP的python的使用很简单,如果只是求解OSQP,不用C++,可以优先用python。 安装步骤
import osqp
import numpy as np
from scipy import sparse
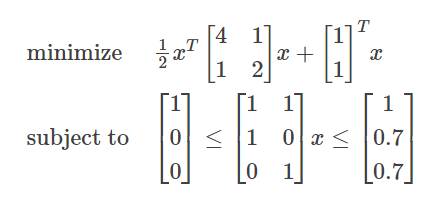
# Define problem data
P = sparse.csc_matrix([[4, 1], [1, 2]])
q = np.array([1, 1])
A = sparse.csc_matrix([[1, 1], [1, 0], [0, 1]])
l = np.array([1, 0, 0])
u = np.array([1, 0.7, 0.7])
# Create an OSQP object
prob = osqp.OSQP()
# Setup workspace and change alpha parameter
prob.setup(P, q, A, l, u, alpha=1.0)
# Solve problem
res = prob.solve()
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK