
3

OVS-DPDK 流表查询详解 - philo_zhou
source link: https://www.cnblogs.com/philo-zhou/p/17219340.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
flow和miniflow
在介绍之前先说一些概念:里面有两个结构很重要,一个是flow一个是miniflow这里介绍一下他们的数据结构和构造函数。
flow:
flow的特点是8字节对齐的,存储报文相关字段和其他原数据,用于匹配流表,数据包含四个层次:
- metadata: 入端口号,寄存器等信息
- l2: 源目的mac,vlan和mpls等信息
- l3: ipv4/ipv6源目的ip,ttl等信息
- l4: 源目的端口号,icmp code和type等信息。
flow的坏处就是占用了很大的字节,并且有很多字段都是0,在2.8版本中flow的大小是672字节。
miniflow
miniflow是flow的压缩版,因为flow占用字节很大,比如可以支持ARP,IP等报文,填充了arp字段,icmp报文就是空的了,浪费了很多信息。过程中用到hash作为key,也是根据miniflow计算hash值,不是用的flow。
struct miniflow {
struct flowmap map;
};
struct flowmap {
map_t bits[FLOWMAP_UNITS];
};
miniflow其包含两部分内容:
- struct flowmap map;是bit数组,使用其中的bit表示flow中哪个8字节存在有效数据,flow中占多少个8字节,那么就需要map中多个个bit,并且按照64bit向上取整。
- 第二部分是有效数据,有效数据动态分配,根据struct flowmap map;中1bit数个数进行分配,大小为bit数*8字节,该部分直接跟在map后面。该部分存储在netdev_flow_key结构中的buf数组。
miniflow数据结构:
//flow是8字节对齐的,除8得到flow中包含8字节的个数
#define FLOW_U64S (sizeof(struct flow) / sizeof(uint64_t))
//map大小为8字节,MAP_T_BITS 为64位
typedef unsigned long long map_t;
#define MAP_T_BITS (sizeof(map_t) * CHAR_BIT)
//每位表示一个u64,FLOWMAP_UNITS 表示最少需要几个64位
#define FLOWMAP_UNITS DIV_ROUND_UP(FLOW_U64S, MAP_T_BITS)
struct flowmap {
map_t bits[FLOWMAP_UNITS];
};
struct miniflow {
struct flowmap map;
/* Followed by:
* uint64_t values[n];
* where 'n' is miniflow_n_values(miniflow). */
};
struct netdev_flow_key {
uint32_t hash;
uint32_t len;
struct miniflow mf; // bits
uint64_t buf[FLOW_MAX_PACKET_U64S]; // 就是上边所说的value
};
// 有些字段是互斥的
#define FLOW_MAX_PACKET_U64S (FLOW_U64S \
/* Unused in datapath */ - FLOW_U64_SIZE(regs) \
- FLOW_U64_SIZE(metadata) \
/* L2.5/3 */ - FLOW_U64_SIZE(nw_src) /* incl. nw_dst */ \
- FLOW_U64_SIZE(mpls_lse) \
/* L4 */ - FLOW_U64_SIZE(tp_src) \
)
miniflow优点:
- 使用miniflow可以节省内存
- 如果只想遍历flow中的非0字段时,使用miniflow找到对应的非0字段,可以节省时间
flow->miniflow函数:miniflow_extract()
void
miniflow_extract(struct dp_packet *packet, struct miniflow *dst)
{
...
// 初始化赋值有两个关键,一个是这个values: return (uint64_t *)(mf + 1);
// 就是上边说的
uint64_t *values = miniflow_values(dst);
struct mf_ctx mf = { FLOWMAP_EMPTY_INITIALIZER, values,
values + FLOW_U64S };
...
if (md->skb_priority || md->pkt_mark) {
miniflow_push_uint32(mf, skb_priority, md->skb_priority);
miniflow_push_uint32(mf, pkt_mark, md->pkt_mark);
}
miniflow_push_be16(mf, dl_type, dl_type);
miniflow_pad_to_64(mf, dl_type);
...
// 去取网络层信息,从这里可以看出,ovs暂时只支持IP,IPV6,ARP,RARP报文
if (OVS_LIKELY(dl_type == htons(ETH_TYPE_IP))){...}
else if
...
// 提取传输层,从这里可以看出,ovs暂时支持传输层协议有TCP,UDP,SCTP,ICMP,ICMPV6
if (OVS_LIKELY(nw_proto == IPPROTO_TCP)){...}
else if
...
miniflow_push_uint32()
在上面将value保存到miniflow时,用到了几个辅助函数,比如下面的miniflow_push_uint32用来将一个32位的值保存到miniflow中FIELD对应的位置。其首先调用offsetof获取field在flow中的偏移字节数,因为flow是8字节对齐的,所以一个四字节的成员变量要么位于8字节的起始位置,要么位于8字节的中间位置,即对8取模值肯定为0或者4,再调用miniflow_push_uint32_保存到对应的位置,并设置map中对应的bit为1。
#define miniflow_push_uint32(MF, FIELD, VALUE) \
miniflow_push_uint32_(MF, offsetof(struct flow, FIELD), VALUE)
#define miniflow_push_uint32_(MF, OFS, VALUE) \
{ \
MINIFLOW_ASSERT(MF.data < MF.end); \
\
//成员变量位于起始位置,需要调用miniflow_set_map设置对应的bit为1
if ((OFS) % 8 == 0) { \
miniflow_set_map(MF, OFS / 8); \
*(uint32_t *)MF.data = VALUE; \
} else if ((OFS) % 8 == 4) { \
//成员变量不在起始位置,要判断此变量所在的bit为1
miniflow_assert_in_map(MF, OFS / 8); \
*((uint32_t *)MF.data + 1) = VALUE; \
MF.data++; \
} \
}
miniflow->flow函数:miniflow_expand()
/* Initializes 'dst' as a copy of 'src'. */
void
miniflow_expand(const struct miniflow *src, struct flow *dst)
{
memset(dst, 0, sizeof *dst);
flow_union_with_miniflow(dst, src);
}
/* Perform a bitwise OR of miniflow 'src' flow data with the equivalent
* fields in 'dst', storing the result in 'dst'. */
static inline void
flow_union_with_miniflow(struct flow *dst, const struct miniflow *src)
{
flow_union_with_miniflow_subset(dst, src, src->map);
}
static inline void
flow_union_with_miniflow_subset(struct flow *dst, const struct miniflow *src,
struct flowmap subset)
{
uint64_t *dst_u64 = (uint64_t *) dst;
const uint64_t *p = miniflow_get_values(src);
map_t map;
//遍历所有的map
FLOWMAP_FOR_EACH_MAP (map, subset) {
size_t idx;
//遍历map中所有的非0bit
MAP_FOR_EACH_INDEX(idx, map) {
dst_u64[idx] |= *p++;
}
dst_u64 += MAP_T_BITS;
}
}
流表查询过程
该部分入口在lib/dpif-netdev.c,就是最开始的那个图。
查询的缓存分为两层:一个是DFC,一个是dpcls,相当于microflow和megaflow,DFC由两部分组成,DFC(datapath flow cache):EMC(Exact match cache)+SMC(Signature match cache),另一部分就是dpcls(datapath classifer)。
SMC默认关闭:bool smc_enable = smap_get_bool(other_config, "smc-enable", false);
函数执行流程(不包含SMC的):
入口在dp_netdev_input__()
static void
dp_netdev_input__(struct dp_netdev_pmd_thread *pmd,
struct dp_packet_batch *packets,
bool md_is_valid, odp_port_t port_no)
{
#if !defined(__CHECKER__) && !defined(_WIN32)
const size_t PKT_ARRAY_SIZE = dp_packet_batch_size(packets);
#else
/* Sparse or MSVC doesn't like variable length array. */
enum { PKT_ARRAY_SIZE = NETDEV_MAX_BURST };
#endif
OVS_ALIGNED_VAR(CACHE_LINE_SIZE)
struct netdev_flow_key keys[PKT_ARRAY_SIZE];
struct netdev_flow_key *missed_keys[PKT_ARRAY_SIZE];
struct packet_batch_per_flow batches[PKT_ARRAY_SIZE];
size_t n_batches;
struct dp_packet_flow_map flow_map[PKT_ARRAY_SIZE];
uint8_t index_map[PKT_ARRAY_SIZE];
size_t n_flows, i;
odp_port_t in_port;
n_batches = 0;
// 1. dfc_processing之后会把miss的放到packets里
// 找到的可能已经batched了,或者放到flow_map里了
// flow_map里是未bathed的,可能直接是*flow或者是NULL,是NULL再去下一层cache查
dfc_processing(pmd, packets, keys, missed_keys, batches, &n_batches,
flow_map, &n_flows, index_map, md_is_valid, port_no);
// 2. 如果有miss的,再去找fast-path,也就是查dpcls
if (!dp_packet_batch_is_empty(packets)) {
in_port = packets->packets[0]->md.in_port.odp_port;
fast_path_processing(pmd, packets, missed_keys,
flow_map, index_map, in_port);
}
/* Batch rest of packets which are in flow map. */
for (i = 0; i < n_flows; i++) {
struct dp_packet_flow_map *map = &flow_map[i];
if (OVS_UNLIKELY(!map->flow)) {
continue;
}
dp_netdev_queue_batches(map->packet, map->flow, map->tcp_flags,
batches, &n_batches);
}
for (i = 0; i < n_batches; i++) {
batches[i].flow->batch = NULL;
}
// 执行每个packet的action
for (i = 0; i < n_batches; i++) {
packet_batch_per_flow_execute(&batches[i], pmd);
}
}
1. DFC查询:dfc_processing()
static inline size_t
dfc_processing(struct dp_netdev_pmd_thread *pmd,
struct dp_packet_batch *packets_,
struct netdev_flow_key *keys,
struct netdev_flow_key **missed_keys,
struct packet_batch_per_flow batches[], size_t *n_batches,
struct dp_packet_flow_map *flow_map,
size_t *n_flows, uint8_t *index_map,
bool md_is_valid, odp_port_t port_no)
{
struct netdev_flow_key *key = &keys[0];
size_t n_missed = 0, n_emc_hit = 0;
struct dfc_cache *cache = &pmd->flow_cache;
struct dp_packet *packet;
size_t cnt = dp_packet_batch_size(packets_);
// emc的插入概率,如果为0,表示不开启emc
uint32_t cur_min = pmd->ctx.emc_insert_min;
int i;
uint16_t tcp_flags;
bool smc_enable_db;
// 记录未batched的个数
size_t map_cnt = 0;
// 这个变量用于保序
bool batch_enable = true;
// 获取smc是否开启参数
atomic_read_relaxed(&pmd->dp->smc_enable_db, &smc_enable_db);
pmd_perf_update_counter(&pmd->perf_stats,
md_is_valid ? PMD_STAT_RECIRC : PMD_STAT_RECV,
cnt);
do_dfc_hook(pmd, packets_, batches, n_batches);
cnt = dp_packet_batch_size(packets_);
// 逐个对dp_packet_batch中的每一个packet进行处理
DP_PACKET_BATCH_REFILL_FOR_EACH (i, cnt, packet, packets_) {
struct dp_netdev_flow *flow;
// 若packet包长小于以太头的长度直接丢包
if (OVS_UNLIKELY(dp_packet_size(packet) < ETH_HEADER_LEN)) {
dp_packet_delete(packet);
COVERAGE_INC(datapath_drop_rx_invalid_packet);
continue;
}
// 对数据手工预取可减少读取延迟,从而提高性能
if (i != cnt - 1) {
struct dp_packet **packets = packets_->packets;
/* Prefetch next packet data and metadata. */
OVS_PREFETCH(dp_packet_data(packets[i+1]));
pkt_metadata_prefetch_init(&packets[i+1]->md);
}
// 初始化metadata首先将pkt_metadata中flow_in_port前的字节全部设为0
// 将in_port.odp_port设为port_no, tunnel.ipv6_dst设为in6addr_any
if (!md_is_valid) {
pkt_metadata_init(&packet->md, port_no);
}
// 报文转化为miniflow, 上文有讲
miniflow_extract(packet, &key->mf);
key->len = 0; /* Not computed yet. */
// 计算当前报文miniflow的hash值
key->hash =
(md_is_valid == false)
? dpif_netdev_packet_get_rss_hash_orig_pkt(packet, &key->mf)
: dpif_netdev_packet_get_rss_hash(packet, &key->mf);
// 根据key->hash,emc_entry alive,miniflow 3个条件得到dp_netdev_flow
// cur_min = 0,表示不可能插入,后面有讲什么时候才会插入EMC
flow = (cur_min != 0) ? emc_lookup(&cache->emc_cache, key) : NULL;
if (OVS_LIKELY(flow)) {
tcp_flags = miniflow_get_tcp_flags(&key->mf);
n_emc_hit++; // 命中次数+1
// 为了保证报文的顺序,所有的packet对应的flow都用flow_map存储
// flow_map里面就是packet数量对应的(packet,flow,tcp_flag)
// 最后会把这些在dp_netdev_input__里重新把顺序合并一下
if (OVS_LIKELY(batch_enable)) {
// 把查到的flow加到batches里第n_batches个batch里
dp_netdev_queue_batches(packet, flow, tcp_flags, batches,
n_batches);
} else {
packet_enqueue_to_flow_map(packet, flow, tcp_flags,
flow_map, map_cnt++);
}
} else {
// 这些数据结构用于smc查询时的记录
// 没查到把packet放到packets_里,从下标0再开始放
// 最后packets_都是未查到的
dp_packet_batch_refill(packets_, packet, i);
index_map[n_missed] = map_cnt;
flow_map[map_cnt++].flow = NULL;
missed_keys[n_missed] = key;
key = &keys[++n_missed];
batch_enable = false; // 之后的都是未batched的
}
}
*n_flows = map_cnt;
pmd_perf_update_counter(&pmd->perf_stats, PMD_STAT_EXACT_HIT, n_emc_hit);
// 如果没有开启smc,直接返回了
if (!smc_enable_db) {
return dp_packet_batch_size(packets_);
}
smc_lookup_batch(pmd, keys, missed_keys, packets_,
n_missed, flow_map, index_map);
return dp_packet_batch_size(packets_);
}
1.1 emc查询:emc_lookup()
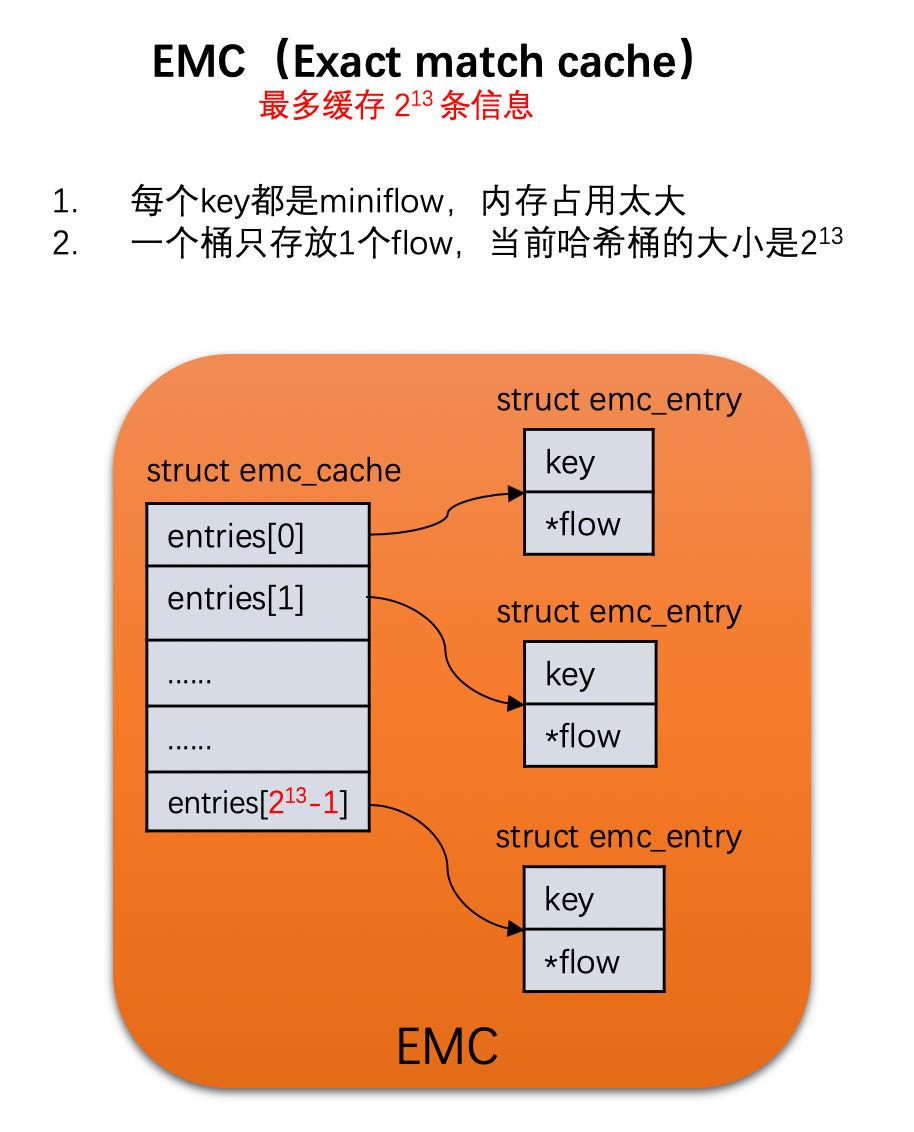
static inline struct dp_netdev_flow *
emc_lookup(struct emc_cache *cache, const struct netdev_flow_key *key)
{
struct emc_entry *current_entry;
// 这里说一下,一个hash分配两个桶,长度为13位,cache桶的大小为1<<13
// struct emc_cache {
// struct emc_entry entries[EM_FLOW_HASH_ENTRIES];
// int sweep_idx; /* For emc_cache_slow_sweep(). */
// };
EMC_FOR_EACH_POS_WITH_HASH (cache, current_entry, key->hash) {
if (current_entry->key.hash == key->hash
&& emc_entry_alive(current_entry)
&& emc_flow_key_equal_mf(¤t_entry->key, &key->mf)) {
/* We found the entry with the 'key->mf' miniflow */
return current_entry->flow;
}
}
return NULL;
}
#define EM_FLOW_HASH_SHIFT 13
#define EM_FLOW_HASH_ENTRIES (1u << EM_FLOW_HASH_SHIFT)
#define EM_FLOW_HASH_MASK (EM_FLOW_HASH_ENTRIES - 1)
#define EM_FLOW_HASH_SEGS 2
#define EMC_FOR_EACH_POS_WITH_HASH(EMC, CURRENT_ENTRY, HASH) \
for (uint32_t i__ = 0, srch_hash__ = (HASH); \
(CURRENT_ENTRY) = &(EMC)->entries[srch_hash__ & EM_FLOW_HASH_MASK], \
i__ < EM_FLOW_HASH_SEGS; \
i__++, srch_hash__ >>= EM_FLOW_HASH_SHIFT)
// 比较miniflow是否相同
static inline bool
emc_flow_key_equal_mf(const struct netdev_flow_key *key,
const struct miniflow *mf)
{
return !memcmp(&key->mf, mf, key->len);
}
EMC查询函数执行:
1.2 smc查询:smc_lookup_batch()
static inline void
smc_lookup_batch(struct dp_netdev_pmd_thread *pmd,
struct netdev_flow_key *keys,
struct netdev_flow_key **missed_keys,
struct dp_packet_batch *packets_,
const int cnt,
struct dp_packet_flow_map *flow_map,
uint8_t *index_map)
{
int i;
struct dp_packet *packet;
size_t n_smc_hit = 0, n_missed = 0;
struct dfc_cache *cache = &pmd->flow_cache;
struct smc_cache *smc_cache = &cache->smc_cache;
const struct cmap_node *flow_node;
int recv_idx;
uint16_t tcp_flags;
/* Prefetch buckets for all packets */
for (i = 0; i < cnt; i++) {
OVS_PREFETCH(&smc_cache->buckets[keys[i].hash & SMC_MASK]);
}
DP_PACKET_BATCH_REFILL_FOR_EACH (i, cnt, packet, packets_) {
struct dp_netdev_flow *flow = NULL;
// 找到hash相同的flow链表的头节点
flow_node = smc_entry_get(pmd, keys[i].hash);
bool hit = false;
/* Get the original order of this packet in received batch. */
recv_idx = index_map[i];
if (OVS_LIKELY(flow_node != NULL)) {
// 遍历一下看看哪一个是相同的,这个通过offsetof找到存放该cmap结构体的首地址
// dp_netdev_flow里面的首地址就是,
CMAP_NODE_FOR_EACH (flow, node, flow_node) {
/* Since we dont have per-port megaflow to check the port
* number, we need to verify that the input ports match. */
if (OVS_LIKELY(dpcls_rule_matches_key(&flow->cr, &keys[i]) &&
flow->flow.in_port.odp_port == packet->md.in_port.odp_port)) {
tcp_flags = miniflow_get_tcp_flags(&keys[i].mf);
keys[i].len =
netdev_flow_key_size(miniflow_n_values(&keys[i].mf));
if (emc_probabilistic_insert(pmd, &keys[i], flow)) {
if (flow->status == OFFLOAD_NONE) {
queue_netdev_flow_put(pmd->dp->dp_flow_offload, \
pmd->dp->class, \
flow, NULL, DP_NETDEV_FLOW_OFFLOAD_OP_ADD);
}
}
packet_enqueue_to_flow_map(packet, flow, tcp_flags,
flow_map, recv_idx);
n_smc_hit++;
hit = true;
break;
}
}
if (hit) {
continue;
}
}
// SMC也miss了,和之前一样,把miss的放packets_里,从0开始放
dp_packet_batch_refill(packets_, packet, i);
index_map[n_missed] = recv_idx;
missed_keys[n_missed++] = &keys[i];
}
pmd_perf_update_counter(&pmd->perf_stats, PMD_STAT_SMC_HIT, n_smc_hit);
}
查找hash相同的链表头:smc_entry_get()
static inline const struct cmap_node *
smc_entry_get(struct dp_netdev_pmd_thread *pmd, const uint32_t hash)
{
struct smc_cache *cache = &(pmd->flow_cache).smc_cache;
// smc_cache桶的大小是(1<<18),SMC_MASK=(1<<18)- 1
// 先通过后hash的后18位定位到桶
struct smc_bucket *bucket = &cache->buckets[hash & SMC_MASK];
// 一个桶有4个16位的sig,存key->hash前16位,正好是64位
// 遍历4个元素看那个匹配,获得匹配后的cmap的下标
uint16_t sig = hash >> 16;
uint16_t index = UINT16_MAX;
for (int i = 0; i < SMC_ENTRY_PER_BUCKET; i++) {
if (bucket->sig[i] == sig) {
index = bucket->flow_idx[i];
break;
}
}
// 通过index找到在dpcls里的桶位置
if (index != UINT16_MAX) {
return cmap_find_by_index(&pmd->flow_table, index);
}
return NULL;
}
1.3 更新emc:emc_probabilistic_insert()
命中SMC后,插入回上一层cache(EMC)里:emc_probabilistic_insert()
插入EMC的条件:
默认插入流表的概率是1%,可以通过ovs-vsctl set Open_vSwitch . other_config:emc-insert-prob=10 设置概率,表示平均10条流表有1条插入,当为0时禁用EMC,当为1的时候,百分百插入。设置后会在代码里设置emc_insert_min字段为uint_max/10,插入的时候生成一个uint_random(),如果随机数小于emc_insert_min才会插入。
static inline bool
emc_probabilistic_insert(struct dp_netdev_pmd_thread *pmd,
const struct netdev_flow_key *key,
struct dp_netdev_flow *flow)
{
/* Insert an entry into the EMC based on probability value 'min'. By
* default the value is UINT32_MAX / 100 which yields an insertion
* probability of 1/100 ie. 1% */
uint32_t min = pmd->ctx.emc_insert_min;
if (min && random_uint32() <= min) {
emc_insert(&(pmd->flow_cache).emc_cache, key, flow);
return true;
}
return false;
}
emc_insert同样有我在内核查询里的问题,如果cache里没有该miniflow,会找一个hash值小的entry,覆盖这个entry,那如果有一个hash很大的flow被插入了,但是这个flow之后就没用过了,那岂不是这个entry就浪费了,不会被用到。
找到了合适的emc_entry。则将报文对应的netdev_dev_flow key信息存储到该表项中。而对于这个表项,原有的emc_entry.flow有可能还有指向一条旧的流表,需要将这条流表的引用计数减1,如果减1后达到0,则释放该流表空间。同时更新emc_entry.flow重新指向新的流表。到此为止,EMC表项更新完毕。
static inline void
emc_insert(struct emc_cache *cache, const struct netdev_flow_key *key,
struct dp_netdev_flow *flow)
{
struct emc_entry *to_be_replaced = NULL;
struct emc_entry *current_entry;
EMC_FOR_EACH_POS_WITH_HASH(cache, current_entry, key->hash) {
if (netdev_flow_key_equal(¤t_entry->key, key)) {
/* We found the entry with the 'mf' miniflow */
emc_change_entry(current_entry, flow, NULL);
return;
}
/* Replacement policy: put the flow in an empty (not alive) entry, or
* in the first entry where it can be */
if (!to_be_replaced
|| (emc_entry_alive(to_be_replaced)
&& !emc_entry_alive(current_entry))
|| current_entry->key.hash < to_be_replaced->key.hash) {
// 这个黄色判断就是我迷惑的地方
to_be_replaced = current_entry;
}
}
/* We didn't find the miniflow in the cache.
* The 'to_be_replaced' entry is where the new flow will be stored */
emc_change_entry(to_be_replaced, flow, key);
}
1.4 EMC的轮训更新
在pmd_thread_main()里面:
if (lc++ > 1024) {
lc = 0;
coverage_try_clear();
// 这里的optimize是排序一下TSS
dp_netdev_pmd_try_optimize(pmd, poll_list, poll_cnt);
dp_netdev_pmd_hook_idle_run(pmd);
#ifdef ENABLE_EMC
if (!ovsrcu_try_quiesce()) {
emc_cache_slow_sweep(pmd->dp, &((pmd->flow_cache).emc_cache));
}
#else
ovsrcu_try_quiesce();
#endif
for (i = 0; i < poll_cnt; i++) {
uint64_t current_seq =
netdev_get_change_seq(poll_list[i].rxq->port->netdev);
if (poll_list[i].change_seq != current_seq) {
poll_list[i].change_seq = current_seq;
poll_list[i].rxq_enabled =
netdev_rxq_enabled(poll_list[i].rxq->rx);
}
}
}
1.5 承上启下:OVS的TSS算法
dpcls是megaflow的查询过程,使用TSS算法,是个很老的算法了,看源码之前,先讲一下ovs里面的TSS,之前内核已经讲过,但是没有讲OVS里做的优化,下边再说一次,然后建议再去看一下这个有很多图的博客OVS-DPDK Datapath Classifier,这样之后对整个dpcls流程就有所了解了。
TSS算法原理
OVS 在内核态使用了元组空间搜索算法(Tuple Space Search,简称 TSS)进行流表查找,元组空间搜索算法的核心思想是,把所有规则按照每个字段的前缀长度进行组合,并划分为不同的元组中,然后在这些元组集合中进行哈希查找。我们举例说明,假设现有 10 条规则以及 3 个匹配字段,每个匹配字段长度均为 4:
我们将每条规则各匹配字段的前缀长度提取出来,按照前缀长度进行组合,并根据前缀长度组合进行分组:
我们将每个前缀长度组合称为 元组,每个元组对应于哈希表的一个桶,同一前缀长度组合内的所有规则放置在同一个哈希桶内:
10 条规则被划分为 4 个元组,因此最多只需要四次查找,就可以找到对应的规则。
算法优缺点
为什么OVS选择TSS,而不选择其他查找算法?论文给出了以下三点解释:
(1)在虚拟化数据中心环境下,流的添加删除比较频繁,TSS支持高效的、常数时间的表项更新; (2)TSS支持任意匹配域的组合; (3)TSS存储空间随着流的数量线性增长,空间复杂度为 O(N),N 为规则数目。
元组空间搜索算法的缺点是,由于基于哈希表实现,因此查找的时间复杂度不能确定。当所有规则各个字段的前缀长度组合数目过多时,查找性能会大大降低,最坏情况下需要查找所有规则。
OVS里做的排序优化
查找的过程需要从前向后遍历所有元组,命中了就不用往后查了。OVS给每个元组加了一个命中次数,命中次数越多,元组这个链表越靠前,这样就可以减少了查表次数。
2. dpcls查询
2.1 dpcls相关数据结构
// 线程安全的
#define OVSRCU_TYPE(TYPE) struct { ATOMIC(TYPE) p; }
struct cmap {
OVSRCU_TYPE(struct cmap_impl *) impl;
};
/* The implementation of a concurrent hash map. */
struct cmap_impl {
// 补齐64字节
PADDED_MEMBERS_CACHELINE_MARKER(CACHE_LINE_SIZE, cacheline0,
unsigned int n; /* Number of in-use elements. */
unsigned int max_n; /* Max elements before enlarging. */
unsigned int min_n; /* Min elements before shrinking. */
uint32_t mask; /* Number of 'buckets', minus one. */
uint32_t basis; /* Basis for rehashing client's
hash values. */
);
PADDED_MEMBERS_CACHELINE_MARKER(CACHE_LINE_SIZE, cacheline1,
struct cmap_bucket buckets[1];
);
};
struct cmap_bucket {
/* Padding to make cmap_bucket exactly one cache line long. */
PADDED_MEMBERS(CACHE_LINE_SIZE,
// 锁机制,读和写都会+1,读的时候等到变成偶数再去读,保证安全
atomic_uint32_t counter;
// 桶中的每个槽用(hashs[i], nodes[i])元组来表示
uint32_t hashes[CMAP_K];
struct cmap_node nodes[CMAP_K];
);
};
struct cmap_node {
OVSRCU_TYPE(struct cmap_node *) next; /* Next node with same hash. */
};
/* 二级匹配表.每个报文接收端口对应一个 */
struct dpcls {
struct cmap_node node; /* 链表节点 */
odp_port_t in_port; /* 报文接收端口 */
struct cmap subtables_map; // 管理下边subtables的索引,用于遍历
struct pvector subtables; // 上文TSS算法所说的元组表
}
struct pvector {
// 指向具体子表信息
OVSRCU_TYPE(struct pvector_impl *) impl;
// 平时,temp都是为NULL.只有当pvector扩充时,temp才用来临时缓存数据.
// 待排好序后,再拷贝到impl中,temp再置NULL
struct pvector_impl *temp;
};
// 相当于vector<pvector_entry>
struct pvector_impl {
size_t size; /* Number of entries in the vector */
size_t allocated; /* Number allocted entries */
/* 初始化的时候只有4个元素.后续可能会扩充 */
struct pvector_entry vector[];
}
struct pvector_entry {
// pvector_impl中的vector是按照priority从小到大排序的
// pmd_thread_main里会把priority赋值为hit_cnt,然后排序
int priority;
/* 实际指向了struct dpcls_subtable结构 */
void *ptr;
}
// 子表信息
struct dpcls_subtable {
/* The fields are only used by writers. */
struct cmap_node cmap_node OVS_GUARDED; /* Within dpcls 'subtables_map'. */
struct cmap rules; // 该表的bucket内容
uint32_t hit_cnt; // 命中该子表的次数
// 下边是mask的miniflow前两个的bits里1的个数
uint8_t mf_bits_set_unit0;
uint8_t mf_bits_set_unit1;
// 根据mf_bits_set_unit01选择最合适的查找算法
dpcls_subtable_lookup_func lookup_func;
/* Caches the masks to match a packet to, reducing runtime calculations. */
uint64_t *mf_masks; // 由下边的mask->mf->bits[01]得来的,
struct netdev_flow_key mask; // 该表的掩码信息
};
关于上边的mf_masks与mask,举个例子
mf_bits_set_unit0 = 4, mf_bits_set_unit1 = 0
netdev_flow_key.mf.bits[0] = 111010 (2进制)
mf_masks = [1, 111, 1111, 11111] (2进制)
三个图对应他们的关系,链表三用于遍历的,查找过程中并不会通过链表三方式搜索。查找的时候走的就是链表二的流程。
2.2 dpcls查询入口:fast_path_processing->dpcls_lookup()
static bool
dpcls_lookup(struct dpcls *cls, const struct netdev_flow_key *keys[],
struct dpcls_rule **rules, const size_t cnt,
int *num_lookups_p)
{
#define MAP_BITS (sizeof(uint32_t) * CHAR_BIT)
BUILD_ASSERT_DECL(MAP_BITS >= NETDEV_MAX_BURST);
struct dpcls_subtable *subtable;
uint32_t keys_map = TYPE_MAXIMUM(uint32_t); /* Set all bits. */
if (cnt != MAP_BITS) {
/*keys_map中置1位数为包的总数,并且第i位对应第i个包*/
keys_map >>= MAP_BITS - cnt; /* Clear extra bits. */
}
memset(rules, 0, cnt * sizeof *rules);
int lookups_match = 0, subtable_pos = 1;
uint32_t found_map;
PVECTOR_FOR_EACH (subtable, &cls->subtables) {
// 查找函数,对应下边的lookup_generic()
found_map = subtable->lookup_func(subtable, keys_map, keys, rules);
uint32_t pkts_matched = count_1bits(found_map);
// 搜索的子表个数,加上的是当前这几个key找了多少个表
lookups_match += pkts_matched * subtable_pos;
keys_map &= ~found_map;
if (!keys_map) {
if (num_lookups_p) {
*num_lookups_p = lookups_match;
}
// 全找到了
return true;
}
subtable_pos++;
}
if (num_lookups_p) {
*num_lookups_p = lookups_match;
}
// 没有全找到
return false;
}
lookup_generic()
ovs-dpdk里面有avx512-gather.c,使用avx512优化了look_up,整体逻辑还是一样的,这里只说dpif-netdev-lookup-generic
入口在这里,往下走,传进去subtable有效字段有多大
static uint32_t
dpcls_subtable_lookup_generic(struct dpcls_subtable *subtable,
uint32_t keys_map,
const struct netdev_flow_key *keys[],
struct dpcls_rule **rules)
{
return lookup_generic_impl(subtable, keys_map, keys, rules,
subtable->mf_bits_set_unit0,
subtable->mf_bits_set_unit1);
}
static inline uint32_t ALWAYS_INLINE
lookup_generic_impl(struct dpcls_subtable *subtable, // 当前的subtable
uint32_t keys_map, // miss_bit_map
const struct netdev_flow_key *keys[], // miss_key
struct dpcls_rule **rules, // save hit_rule
const uint32_t bit_count_u0,
const uint32_t bit_count_u1)
{
// 有几个包
const uint32_t n_pkts = count_1bits(keys_map);
ovs_assert(NETDEV_MAX_BURST >= n_pkts);
uint32_t hashes[NETDEV_MAX_BURST];
// 根据mask字段的大小开空间
const uint32_t bit_count_total = bit_count_u0 + bit_count_u1;
// 一个batch最大是NETDEV_MAX_BURST
const uint32_t block_count_required = bit_count_total * NETDEV_MAX_BURST;
uint64_t *mf_masks = subtable->mf_masks;
int i;
// 申请存储一个batch报文信息的数组,存放
uint64_t *blocks_scratch = get_blocks_scratch(block_count_required);
// 获得每个key与当前表的mask“与运算”的结果
ULLONG_FOR_EACH_1 (i, keys_map) {
netdev_flow_key_flatten(keys[i],
&subtable->mask, // 该表的掩码信息
mf_masks, // 由subtable->mask处理后的mask
&blocks_scratch[i * bit_count_total],
bit_count_u0,
bit_count_u1);
}
// 算出来每一个key在该subtable里的hash值,该hash值由“mask字节数,key和mask与运算结果”得出
ULLONG_FOR_EACH_1 (i, keys_map) {
uint64_t *block_ptr = &blocks_scratch[i * bit_count_total];
uint32_t hash = hash_add_words64(0, block_ptr, bit_count_total);
hashes[i] = hash_finish(hash, bit_count_total * 8);
}
uint32_t found_map;
const struct cmap_node *nodes[NETDEV_MAX_BURST];
// 找到每个key在该subtable里的cmap,并且返回每个key有没有被找到,第i位是1则找到
found_map = cmap_find_batch(&subtable->rules, keys_map, hashes, nodes);
ULLONG_FOR_EACH_1 (i, found_map) {
struct dpcls_rule *rule;
// 可能不同的rule有相同的hash,看那个是匹配的
CMAP_NODE_FOR_EACH (rule, cmap_node, nodes[i]) {
const uint32_t cidx = i * bit_count_total;
/*rule->mask & keys[i]的值与rule->flow相比较*/
uint32_t match = netdev_rule_matches_key(rule, bit_count_total,
&blocks_scratch[cidx]);
if (OVS_LIKELY(match)) {
rules[i] = rule;
subtable->hit_cnt++;
goto next;
}
}
ULLONG_SET0(found_map, i); /* Did not match. */
next:
; /* Keep Sparse happy. */
}
return found_map;
}
掩码运算netdev_flow_key_flatten()
// 这个函数对应dpif-netdev.c里面的dpcls_flow_key_gen_masks()
static inline void
netdev_flow_key_flatten(const struct netdev_flow_key *key, // 要查找的miss_key
const struct netdev_flow_key *mask,
const uint64_t *mf_masks,
uint64_t *blocks_scratch,
const uint32_t u0_count,
const uint32_t u1_count)
{
/* Load mask from subtable, mask with packet mf, popcount to get idx. */
const uint64_t *pkt_blocks = miniflow_get_values(&key->mf);
const uint64_t *tbl_blocks = miniflow_get_values(&mask->mf); // 获取miss_key和mask的miniflow
/* Packet miniflow bits to be masked by pre-calculated mf_masks. */
const uint64_t pkt_bits_u0 = key->mf.map.bits[0];
const uint32_t pkt_bits_u0_pop = count_1bits(pkt_bits_u0);
const uint64_t pkt_bits_u1 = key->mf.map.bits[1];
// 这个函数就是把miss_key与subtable的掩码进行&运算
// 会运算出该mask在意字段结果,放到blocks_scratch里
netdev_flow_key_flatten_unit(&pkt_blocks[0], // key-mf的数据段
&tbl_blocks[0], // mask->mf的数据段
&mf_masks[0], // mask->mf->bits得来mask
&blocks_scratch[0], // 存放的地址
pkt_bits_u0, // key->mf里的bits[0]
u0_count); // mask->mf->bits[0]里1的个数
netdev_flow_key_flatten_unit(&pkt_blocks[pkt_bits_u0_pop], // 上边bits[0]的已经算过了,从bits[1]开始算
&tbl_blocks[u0_count],
&mf_masks[u0_count],
&blocks_scratch[u0_count],
pkt_bits_u1,
u1_count);
}
static inline void
netdev_flow_key_flatten_unit(const uint64_t *pkt_blocks, // key-mf的数据段
const uint64_t *tbl_blocks, // mask->mf里的数据段
const uint64_t *mf_masks, // mask->mf->bits得来mask
uint64_t *blocks_scratch, // 存放到这里
const uint64_t pkt_mf_bits, // key->mf里的bits[01]
const uint32_t count) // mask->mf->bits[0]里1的个数
{
// 说一下意思,这个我们流程就是用key和subtable的mask与运算,肯定只需要与运算mask里
// 不为0的字段,其他的mask不关心,然后这个操作就是为了得到key对应字段是key->mf的第几位,
// 比如mask的bits[0]=11111, key的bits[0] = 10100, mask里的第3个1在key里面是第1个
// 这一位与的结果就是tbl_blocks[2]&pkt_blocks[0], 也就是怎么找到key里的下标0
// 就看key当前位之前有几个1就行了。这里这样做的1010111,
// 蓝色1之前有count_1bits(1010111 & 0001111) = 3
// 对上边的mask举个例子 count = 4;
// mask->mf->bits[0] = 111010 (2进制)
// mf_masks = [1, 111, 1111, 11111] (2进制);
// pkt_mf_bits = 010100
// blocks_scratch = [0,0,0,0,pkt_blocks[1]&tbl_blocks[4],0]
uint32_t i;
for (i = 0; i < count; i++) {
// 拿i=2举例
uint64_t mf_mask = mf_masks[i]; // mf_mask = 001111
uint64_t idx_bits = mf_mask & pkt_mf_bits; // idx_bits = 000100
const uint32_t pkt_idx = count_1bits(idx_bits); // pkt_idx = 1
uint64_t pkt_has_mf_bit = (mf_mask + 1) & pkt_mf_bits; // pkt_has_mf_bit = 010000
// 是否求掩码:mask当前位对应的key的字段,如果key在当前位是0,下边算掩码就会变成0
uint64_t no_bit = ((!pkt_has_mf_bit) > 0) - 1; // 2^64 - 1
// mask里第i个字段与运算key对应的字段
blocks_scratch[i] = pkt_blocks[pkt_idx] & tbl_blocks[i] & no_bit; //
}
}
key对应的cmap:cmap_find_batch()
unsigned long
cmap_find_batch(const struct cmap *cmap, unsigned long map,
uint32_t hashes[], const struct cmap_node *nodes[])
{
const struct cmap_impl *impl = cmap_get_impl(cmap);
unsigned long result = map;
int i;
// 每一位就是一个包,一字节8个包
uint32_t h1s[sizeof map * CHAR_BIT];
const struct cmap_bucket *b1s[sizeof map * CHAR_BIT];
const struct cmap_bucket *b2s[sizeof map * CHAR_BIT];
uint32_t c1s[sizeof map * CHAR_BIT];
// 每个impl里桶的数量为impl->mask+1
// 为什么mask是桶的个数减1:因为下标从0开始,找下表的时候直接(hash & impl->mask)就行了
// 至于为什么开两个?因为buckets存放的方法也是一个值对应两个hash
// 第一次hash1 = rehash(impl->basis, hash), 找buckets[hash1 & impl->mask], 遍历里面CMAP_K个元素
// 第二次hash2 = other_hash(hash1), 找buckets[hash2 & impl->mask], 遍历里面CMAP_K个元素
/* Compute hashes and prefetch 1st buckets. */
ULLONG_FOR_EACH_1(i, map) {
h1s[i] = rehash(impl, hashes[i]);
b1s[i] = &impl->buckets[h1s[i] & impl->mask];
OVS_PREFETCH(b1s[i]);
}
/* Lookups, Round 1. Only look up at the first bucket. */
ULLONG_FOR_EACH_1(i, map) {
uint32_t c1;
const struct cmap_bucket *b1 = b1s[i];
const struct cmap_node *node;
do {
c1 = read_even_counter(b1);
// 找一下这个cmap_bucket里面有没有相同hash的
node = cmap_find_in_bucket(b1, hashes[i]);
} while (OVS_UNLIKELY(counter_changed(b1, c1)));
if (!node) {
/* Not found (yet); Prefetch the 2nd bucket. */
b2s[i] = &impl->buckets[other_hash(h1s[i]) & impl->mask];
OVS_PREFETCH(b2s[i]);
c1s[i] = c1; /* We may need to check this after Round 2. */
continue;
}
/* Found. */
ULLONG_SET0(map, i); /* Ignore this on round 2. */
OVS_PREFETCH(node);
nodes[i] = node;
}
/* Round 2. Look into the 2nd bucket, if needed. */
ULLONG_FOR_EACH_1(i, map) {
uint32_t c2;
const struct cmap_bucket *b2 = b2s[i];
const struct cmap_node *node;
do {
c2 = read_even_counter(b2);
node = cmap_find_in_bucket(b2, hashes[i]);
} while (OVS_UNLIKELY(counter_changed(b2, c2)));
if (!node) {
// 可能被修改了,
if (OVS_UNLIKELY(counter_changed(b1s[i], c1s[i]))) {
node = cmap_find__(b1s[i], b2s[i], hashes[i]);
if (node) {
goto found;
}
}
/* Not found. */
ULLONG_SET0(result, i); /* Fix the result. */
continue;
}
found:
OVS_PREFETCH(node);
nodes[i] = node;
}
return result;
}
2.3 fast_path_processing()
static inline void
fast_path_processing(struct dp_netdev_pmd_thread *pmd,
struct dp_packet_batch *packets_,
struct netdev_flow_key **keys,
struct dp_packet_flow_map *flow_map,
uint8_t *index_map,
odp_port_t in_port)
{
const size_t cnt = dp_packet_batch_size(packets_);
#if !defined(__CHECKER__) && !defined(_WIN32)
const size_t PKT_ARRAY_SIZE = cnt;
#else
/* Sparse or MSVC doesn't like variable length array. */
enum { PKT_ARRAY_SIZE = NETDEV_MAX_BURST };
#endif
struct dp_packet *packet;
struct dpcls *cls;
struct dpcls_rule *rules[PKT_ARRAY_SIZE];
struct dp_netdev *dp = pmd->dp;
int upcall_ok_cnt = 0, upcall_fail_cnt = 0;
int lookup_cnt = 0, add_lookup_cnt;
bool any_miss;
for (size_t i = 0; i < cnt; i++) {
/* Key length is needed in all the cases, hash computed on demand. */
keys[i]->len = netdev_flow_key_size(miniflow_n_values(&keys[i]->mf));
}
/* Get the classifier for the in_port */
// 找到端口对应的dpcls结构,每个port有自己的dpcls,因为每个port收到的报文会更相似
cls = dp_netdev_pmd_lookup_dpcls(pmd, in_port);
if (OVS_LIKELY(cls)) {
// 调用dpcls_lookup进行匹配
any_miss = !dpcls_lookup(cls, (const struct netdev_flow_key **)keys,
rules, cnt, &lookup_cnt);
} else {
any_miss = true;
memset(rules, 0, sizeof(rules));
}
// 如果有miss的,则需要进行openflow流表查询
if (OVS_UNLIKELY(any_miss) && !fat_rwlock_tryrdlock(&dp->upcall_rwlock)) {
uint64_t actions_stub[512 / 8], slow_stub[512 / 8];
struct ofpbuf actions, put_actions;
ofpbuf_use_stub(&actions, actions_stub, sizeof actions_stub);
ofpbuf_use_stub(&put_actions, slow_stub, sizeof slow_stub);
DP_PACKET_BATCH_FOR_EACH (i, packet, packets_) {
struct dp_netdev_flow *netdev_flow;
if (OVS_LIKELY(rules[i])) {
continue;
}
// 此时可能已经更新了,在进入upcall之前如果再查一次,如果能够查到,会比upcall消耗的少得多
netdev_flow = dp_netdev_pmd_lookup_flow(pmd, keys[i],
&add_lookup_cnt);
if (netdev_flow) {
lookup_cnt += add_lookup_cnt;
rules[i] = &netdev_flow->cr;
continue;
}
// 第一级和第二级流表查找失败后,就要查找第三级流表了,即openflow流表,这也称为upcall调用。
// 在普通ovs下是通过netlink实现的,在ovs+dpdk下,直接在pmd线程中调用upcall_cb即可。
// 开始查找openflow流表。如果查找openflow流表成功并需要下发到dpcls时,需要判断是否超出最大流表限制
int error = handle_packet_upcall(pmd, packet, keys[i],
&actions, &put_actions);
if (OVS_UNLIKELY(error)) {
upcall_fail_cnt++;
} else {
upcall_ok_cnt++;
}
}
ofpbuf_uninit(&actions);
ofpbuf_uninit(&put_actions);
fat_rwlock_unlock(&dp->upcall_rwlock);
} else if (OVS_UNLIKELY(any_miss)) {
DP_PACKET_BATCH_FOR_EACH (i, packet, packets_) {
if (OVS_UNLIKELY(!rules[i])) {
dp_packet_delete(packet);
COVERAGE_INC(datapath_drop_lock_error);
upcall_fail_cnt++;
}
}
}
DP_PACKET_BATCH_FOR_EACH (i, packet, packets_) {
struct dp_netdev_flow *flow;
/* Get the original order of this packet in received batch. */
int recv_idx = index_map[i];
uint16_t tcp_flags;
if (OVS_UNLIKELY(!rules[i])) {
continue;
}
flow = dp_netdev_flow_cast(rules[i]);
bool hook_cached = false;
if (pmd->cached_hook && \
pmd->cached_hook_pmd && \
pmd->cached_hook->hook_flow_miss) {
hook_cached = pmd->cached_hook->hook_flow_miss(pmd->cached_hook_pmd, packet, flow);
}
if (!hook_cached) {
bool smc_enable_db;
atomic_read_relaxed(&pmd->dp->smc_enable_db, &smc_enable_db);
// 查找到了packet,如果开启了smc,更新smc
if (smc_enable_db) {
uint32_t hash = dp_netdev_flow_hash(&flow->ufid);
smc_insert(pmd, keys[i], hash);
}
// 查到了packet,看是否写会更新上一层cache(EMC)
if (emc_probabilistic_insert(pmd, keys[i], flow)) {
if (flow->status == OFFLOAD_NONE) {
queue_netdev_flow_put(pmd->dp->dp_flow_offload, \
pmd->dp->class, \
flow, NULL, DP_NETDEV_FLOW_OFFLOAD_OP_ADD);
}
}
}
/* Add these packets into the flow map in the same order
* as received.
*/
tcp_flags = miniflow_get_tcp_flags(&keys[i]->mf);
packet_enqueue_to_flow_map(packet, flow, tcp_flags,
flow_map, recv_idx);
}
// 更新各个信息
pmd_perf_update_counter(&pmd->perf_stats, PMD_STAT_MASKED_HIT,
cnt - upcall_ok_cnt - upcall_fail_cnt);
pmd_perf_update_counter(&pmd->perf_stats, PMD_STAT_MASKED_LOOKUP,
lookup_cnt);
pmd_perf_update_counter(&pmd->perf_stats, PMD_STAT_MISS,
upcall_ok_cnt);
pmd_perf_update_counter(&pmd->perf_stats, PMD_STAT_LOST,
upcall_fail_cnt);
}
2.4 smc更新smc_insert()
static inline void
smc_insert(struct dp_netdev_pmd_thread *pmd,
const struct netdev_flow_key *key,
uint32_t hash)
{
struct smc_cache *smc_cache = &(pmd->flow_cache).smc_cache;
struct smc_bucket *bucket = &smc_cache->buckets[key->hash & SMC_MASK];
uint16_t index;
uint32_t cmap_index;
int i;
//布谷鸟算法
cmap_index = cmap_find_index(&pmd->flow_table, hash);
index = (cmap_index >= UINT16_MAX) ? UINT16_MAX : (uint16_t)cmap_index;
/* If the index is larger than SMC can handle (uint16_t), we don't
* insert */
if (index == UINT16_MAX) {
//表明找到了
return;
}
/* If an entry with same signature already exists, update the index */
uint16_t sig = key->hash >> 16;
for (i = 0; i < SMC_ENTRY_PER_BUCKET; i++) {
if (bucket->sig[i] == sig) {
bucket->flow_idx[i] = index;
return;
}
}
/* If there is an empty entry, occupy it. */
for (i = 0; i < SMC_ENTRY_PER_BUCKET; i++) {
if (bucket->flow_idx[i] == UINT16_MAX) {
bucket->sig[i] = sig;
bucket->flow_idx[i] = index;
return;
}
}
/* Otherwise, pick a random entry. */
i = random_uint32() % SMC_ENTRY_PER_BUCKET;
bucket->sig[i] = sig;
bucket->flow_idx[i] = index;
}
3. upcall到openflow查找,然后更新dpcls
这里就不讲具体代码了,讲一下大概:到openflow查找后会更新dpcls,执行dp_netdev_flow_add() --> dpcls_insert() --> dpcls_find_subtable() --> cmap_insert()
dpcls_find_subtable():
找一下是否存在相同mask的subtable,存在返回这个subtable,不存在就创建一个subtable,创建的时候会调用dpcls_create_subtable,里面有个dpcls_subtable_get_best_impl会根据mask的miniflow的bits[0]和bits[1]选择的查找算法。
cmap_insert里hash算法用的就是布谷鸟hash,hash两次,插入的核心代码:
static bool
cmap_try_insert(struct cmap_impl *impl, struct cmap_node *node, uint32_t hash)
{
uint32_t h1 = rehash(impl, hash);
uint32_t h2 = other_hash(h1);
// hash两次找到两个桶
struct cmap_bucket *b1 = &impl->buckets[h1 & impl->mask];
struct cmap_bucket *b2 = &impl->buckets[h2 & impl->mask];
// 插入规则:
// 1.是否有相同hash的node,就插到对应链上
// 2.没有相同hash,就看有没有空的node
// 3.都不行就通过bfs,看能否让b1,b2空出来一个,把这个放进去
// 都不行就插入失败
return (OVS_UNLIKELY(cmap_insert_dup(node, hash, b1) ||
cmap_insert_dup(node, hash, b2)) ||
OVS_LIKELY(cmap_insert_bucket(node, hash, b1) ||
cmap_insert_bucket(node, hash, b2)) ||
cmap_insert_bfs(impl, node, hash, b1, b2));
}
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK