

Altitude Management: A Tale of Ups and Downs in the ATC System
source link: https://developer.x-plane.com/2023/02/altitude-management-a-tale-of-ups-and-downs-in-the-atc-system/
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
Altitude Management: A Tale of Ups and Downs in the ATC System
Deciding what altitude a particular flight segment needs shouldn’t be tricky, right? You take off from somewhere near ground level, you climb to whatever you chose for cruise altitude, you start to descend when you get near the destination and eventually end up on the ground again. What could possibly go wrong?
Why, I’m glad you asked! Make yourselves comfortable, this might take some time.
A bug report arrived from someone saying they’d been vectored into a hillside on approach. That’s something that has had a lot of attention given to it for X-Plane 12, so I jumped on it and reproduced the flight. Happily the person reporting had included the correct logfile (not everyone does, we get loads where the log shows the sim sitting at the main menu!) and given the flightplan details; nothing complicated, a simple direct flight between two airports about 35 miles apart, cruising at 6000 feet.
I set it up and let the AI fly. Takeoff was fine, and then it was told to climb to 8000 feet – above the requested cruise altitude. Checking the map, okay, there was a mountain ridge in the way so that makes sense. Then the problems started. Descend to 7000, then descend to 5500, then climb to 7000, then an endless loop of climb/descend to what looked like random choices of 5000, 6000, 7000 and 8000 feet.
All of the “normal” – and a lot of the unusual – situations for approach and landing are covered in automated tests and they’d last passed the previous day, so I knew that this wasn’t a common problem but it would still be damned annoying if it happened to you.
Digging in a bit, the first thing I found was a good old-fashioned bug. Before X-Plane 12, the ATC system was pretty much exclusively written for airliners and an old bit of code had a problem where, if you were below a normal cruising altitude for an airliner, you might be told to climb slightly before starting the descent. This was kicking in because, when the AI was handed off from tower to the next level controller, it was already close enough to the destination airfield to be seen as an incoming arrival.
If you think about it, this completely breaks the simple altitude model already. The Cessna 172 climbs slowly, so it was approaching the whole “descend, approach, land” sequence from below. X-Plane 12 is wise to this though, so it shouldn’t have been a problem.
So, we’ve got one inappropriate climb instruction sorted. Re-test.
As expected, much the same as before; total indecision on the part of the controller. The next problem soon comes to light: terrain avoidance.
On the face of it, terrain avoidance should also be simple: If hill then climb. Most of the time, it is. Where that falls down is where you’re deliberately trying to get close to the ground like, say, during approach and landing.
If you’re familiar with aviation charts, you’ll know the acronym MSA – Minimum Safe Altitude. Basically the chart is divided into large squares and, in each square, there’s an MSA given. If you fly through that square, you’ll be guaranteed not to hit the ground if you stay above that altitude. It’s simple, it works, and X-Plane does pretty much exactly the same. The terrain elevation data is reduced so that a single pixel gives the MSA for whatever area that pixel covers, and this makes it relatively quick and easy to check.
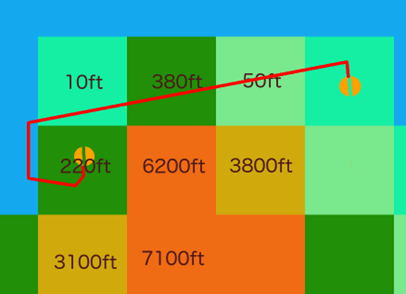
MSAs departing to the north
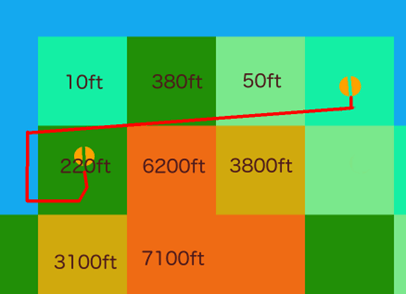
MSAs departing to the south
This flight had a couple of steep ridges going from sea-level to about 6,200 feet which ended just inside one MSA square, and the flight was going just along the top of it at about 90 degrees to the ridges. A few hundred meters difference in location when the terrain samples were taken were enough to change the MSA between about 50 feet and 6,200 feet.
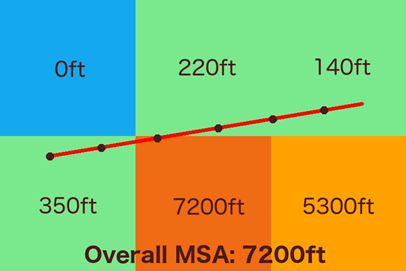
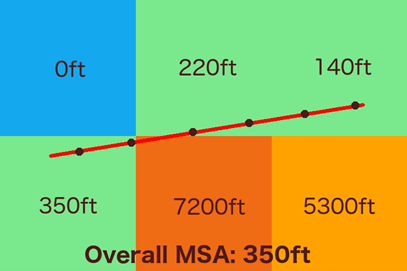
Sample points giving a segment MSA
Checking a little to either side of the route can make this problem more or less go away, and that’s done in some places, but it can’t be used during approach because you’re actively trying to get close to the ground. If you went wide on the terrain checking, you’d never be allowed to land at any airport in a valley or just generally mountainous terrain.
So, back to the problem. The terrain avoidance systems were getting two very different readings depending on both exact timing and position because they were just clipping the edge of the MSA squares and one of those squares covered high ridges which finished at sea level just inside the square’s boundary. One moment it would think you had 5,000 feet of clear air beneath you, the next it was asking the poor, confused AI to climb to avoid terrain.
This problem can’t really be fixed as such, but it can be improved by reducing the sample distance and using full-resolution elevation data instead of the MSA-square summary. The problem with that is that it’s more expensive in CPU terms so it can’t be done all the time. Think of a flight from London to Delhi; checking that for every 30 meters along the route is going to take a long time, and not all of the high-res data is even in memory at once. However, high-res data is already used in some cases, notably for short legs close to the MSA or for known approach legs, but this was happening on a longer cross-country leg which happened to be the one before the actual approach started. Still, easy enough to adjust for that so let’s do that and see what happens.
The next flights were much, much better. Yay! Go for a celebratory coffee, but something nags at the back of my mind.
Coffee over, check the exact routes on the map (anyone can do this – it’s on the Developer menu as “Toggle Air Traffic Paths”). Yep. The wind had changed – I had real weather enabled – and the cross-country leg was starting a couple of miles further north, which meant that all the nonsense with clipping corners in the terrain avoidance code had simply stopped being an issue.
Righto.
Set manual weather, re-test, and… well, it’s better, but still bouncing between two different altitudes even though the MSA’s now more or less stable.
If you remember, this is all happening during approach. When these segments are created, the terrain clearance for each one is checked and the overall approach profile is modified so that you’re not told to descend to the normal altitude, then climb again for terrain avoidance for a later part of the approach. For this flight, the destination airport was on the plains near the coast but surrounded by high mountains to the south, so this system was kicking in and keeping the approach altitudes much higher than they would normally be. However, there’s one more waypoint involved; this is created somewhere between you and the airport and used as a kind of gateway between cruise and approach. The segment after this waypoint was also being terrain-checked, but if any terrain-related adjustments were made to the subsequent approach segments, they weren’t being pushed backwards onto this pre-approach leg. Normally, this wouldn’t happen and even if the approach were modified to clear terrain, it would have to be a very unusual, large adjustment to kick the approach legs higher than the pre-approach waypoint.
Yep, you guessed it.
Still, at least that’s a simple one to fix. Do that, re-test.
This fix is good and the next set of altitudes is… oddly low. So low, in fact, that the “oh shit” mode of the terrain avoidance kicks in. This ignores the route entirely and just uses the plane’s recent movements to predict a near-future location and checks that. This means that the MSA is being ignored somewhere, and there’s now a missing climb instruction.
More testing and this turns out to be caused by a check, during approach, which tries to avoid unnecessary climb instructions. If you’re already at low altitude and call in to an airport to land – i.e. a typical small-plane flight – you don’t want to be told to climb thousands of feet only to descend back to pretty much the altitude you’re already at. So, the controller tries to be nice and lowers parts of the approach if you’re already underneath it. That’s all fine, but… not… if… the approach has been raised to avoid terrain!
Fix that, re-test.
All is well for the first half of the flight. I know, from watching the code as it runs, that from here on in the MSA should be in the region of 5,200 to 7,200 feet depending on the exact timing. High resolution elevation data is being used now, the two mountain ridges are steep from left to right and fairly narrow back to front in relation to the flight direction, so the MSA can vary quite quickly. The expected climb instruction comes in: “Climb to FL080”. Wait; eight thousand?
This was a flight-level though. Checking the transition altitude (the point where it stops using “feet” for altitude and starts using “flight level” and a specific set of rules for choosing them) for the approach controller shows that it’s set at 6000 feet. Yet again, tiny changes in both timing and position were affecting the MSA, but this time it was because the high-resolution elevation data was being used. For the low end, a simple “add some wiggle room and round up to the next 500 feet” was coming up with either 5500 or 6000 feet. At the high end, it was being rounded up into flight-level territory and, because of the direction of flight, punted upwards to either FL070 or FL080. This was only happening because the requested altitude in the plan was exactly on the transition altitude!
Okay, so this one’s probably confusing, but not technically wrong – certainly within the limits of the system.
So the original, simple “Let the AI fly a route and see if it starts tunnelling” check has now taken three days to properly resolve, between investigation, code changes, many re-tests, and then validating the changes on a larger scale using the existing automated tests. On the plus side, it’s been an absolute torture-test for a number of systems which worked just fine in most circumstances, and has brought out problems that were able to be either fixed or at least explained. On the down-side… yeesh!
For a normal flight, none of this would have been a problem. You’d be way above the terrain, descending onto the approach from above. This flight was short, so the slow-climbing Cessna 172 was still on climbout when the approach vectors were issued for altitudes higher than it was currently at. In between the two airports there were ridges which just clipped terrain-altitude data squares so MSA checks returned altitudes which varied significantly with tiny variations in both position and timing. The destination airport had no flows defined, so X-Plane was auto-generating them, but this doesn’t look at terrain so thanks to the airport being in a steep valley, the MSA of the approach vectors unusually remained at 4,500 feet all the way in to final for an airport close to sea-level. Finally, the planned altitude was exactly the controller’s transition altitude, magnifying small differences which would normally be rounded away.
If either airport had been a few miles north or south, or further apart; if the ridges had stopped a few miles further south; if the coast had been a few miles north or south; if the aircraft in use had been able to climb to cruise altitude faster; if the plan had requested an altitude which was above the controller’s transition altitude; if the terrain MSAs hadn’t also straddled the transition altitude; if the airport had defined flows which prevented landings from the south; if the wind had been different. If any of these things had not been exactly as they were, little or none of this would have happened.
So, my – er – thanks to the person that filed this bug report! Completely by accident, you sent several systems beyond what they were able to do and, by filing the report and actually attaching the log from the same flight, allowed me to dig into the system and get rid of a good number of rough edges. It’s also given a fantastic example of “Pssh, how hard can it be?” for the obvious assumption of “well, you climb, then you descend, job done”.
Plus a couple of sleepless nights, but hey.
Oh, the “vectored into a hill” problem? Couldn’t reproduce it.
About Jim Keir
Leave a Reply Cancel reply
Your email address will not be published. Required fields are marked *
Comment *
Please do not report bugs in the blog comments.
Only bugs reported via the X-Plane Bug Reporter are tracked.
Name *
Email *
Website
Save my name, email, and website in this browser for the next time I comment.
I consent for my personal data (including name, email address, and web site) to be used in accordance with this site’s privacy policy. (Your name and web site will be publicly visible with your comment, but Laminar Research will never share your email address with third parties.) *
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK