

CP classic AUTOSAR与AP Adaptive AUTOSAR简单比较
source link: https://zhuanlan.zhihu.com/p/130668798
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
CP classic AUTOSAR与AP Adaptive AUTOSAR简单比较
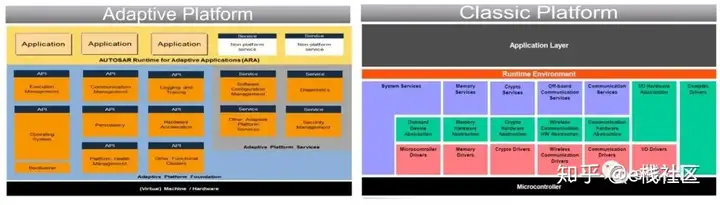
CP与AP架构比较
1,什么是AUTOSAR
AUTOSAR(AUTmotive Open System ARchitecture) 是汽车电子E/E系统发展的一个重要历程杯。是由包括BMW、DAIMLER、GM、TOYOTA、福特等主机厂和包括博世、大陆等供应商牵头成立的一个标准发展组织定义的一个开放参考的ECU软件架构。
发展AUTOSAR的想法最开始于2003年,初衷是为了避免反复重复开发功能相同相近的软件模块。使用独立于系统的标准软件平台,可缩短产品上市时间,减少开发工作,并可从同一组组件中开发出更多产品,提高产品质量。
目前AUTOSAR分为Classic Platform AUTOSAR(CP)和Adaptive Platform AUTOSAR(AP)两个平台。最早的Classic AUTOSAR目前已广泛应用于传统嵌入式ECU中,如发动机控制器、电机控制器、整车控制器、BMS控制器等等,而Adaptive AUTOSAR未来会更多的应用于如ADAS、自动驾驶等需求高计算能力、高带宽通信、分布式部署的下一代汽车应用领域中。
2,Classic AUTOSAR简介
Classic AUTOSAR标准在最高抽象级别上将运行在控制器上的软件分为三层:Application,runtime environment(RTE)和basic software(BSW)。
- Application Layer,不依赖于硬件的
- 软件模块间通过RTE交互,并通过RTE访问BSW
- RTE体现了application的所有接口
- BSW又分为3大层和复杂驱动:服务层、ECU抽象层、MCU抽象层
- 服务层又细分为不同的服务组件,比如系统服务、存储服务、通信服务等
Classic AUTOSAR主要特点:
- 基于C语言面向过程开发
- FOA架构(function-oriented architecture)
- 基于信号的静态配置通信方式(LIN\CAN...通信矩阵)
- 硬件资源的连接关系局限于线束的连接
- 静态的服务模块,模块和配置在发布前进行静态编译、链接
- 大部分代码静态运行在ROM,所有application共用一个地址空间
- OSEK OS
3,Adaptive AUTOSAR简介
Adaptive AUTOSAR标准定义了一个ARA运行环境(AUTOSAR Runtime for Adaptive Applications)。分为两种接口类型:service和APIs。平台由根据服务(Platform Service)和Adaptive AUTOSAR基础(Platform Foundation)分组的多个功能栈(功能集群)组成。每个功能栈:
- 聚合了自适应平台功能
- 定义了功能栈需求规范
- 从应用程序和网络角度描述软件平台的行为
- 但不限制最终在自适应平台中的具体软件架构设计
每台(虚拟)计算机必须至少有一个包含Adaptive AUTOSAR基础(Platform Foundation)的实例,而服务功能栈(Platform Service)可能分布于车载网络中。
相比于Classic AUTOSAR,用于Adaptive AUTOSAR的AUTOSAR Runtime Environment在运行时动态链接服务和客户端。
Adaptive AUTOSAR主要特点:
- 基于C++语言面向对象开发
- SOA架构(service-oriented architecture)
- 基于服务的SOA动态通信方式(SOME/IP…)
- 硬件资源间的连接关系虚拟化,不局限于通信线束的连接关系(互联网)
- 服务可根据应用需求动态加载,可通过配置文件动态加载配置,并可进行单独更新
- application加载到RAM运行,每个application独享(虚拟)一个地址空间
- POSIX-basedOS(Linux\PikeOS…),兼容性广,可移植性高
4,为什么Adaptive AUTOSAR
AP与CP部署场景
传统嵌入式ECUs主要实现替代或增强电气系统的功能。这些ECUs中的软件主要根据输入的电气信号和来自车载网络上其他ECUs的输出信息来控制其输出的电气信号,它们在整个车辆寿命中往往不会发生明显变化。
而下一代的车辆运用,比如自动驾驶,将需求更复杂、更高计算资源的软件,并满足更严苛的integrity和security要求。这些软件需要实现比如环境感知、行为计划等功能,并需要将车辆融入到外部后台系统和基建系统中。随着外部系统的不断发展或改进的功能,要求车辆中的软件能够不断被更新。
Classic AUTOSAR(CP)满足了传统嵌入式ECU的需求,而上述ECU的需求无法满足。因此AUTOSAR指定了另外一个软件平台,即Adaptive AUTOSAR(AP)。AP更专注提供高性能计算和通讯机制,并提供灵活的软件配置,例如支持无线更新软件(FOTA)。
Adaptive AUTOSAR优势:
- ECU更加智能:基于SOA通信使得AP中ECU可以动态的同其他ECU提供或获取服务,动态同其他ECU进行连接
- 更强大计算能力:基于SOA架构使得AP能够更好支持多核、多ECU、多SoCs并行处理,提供更强大的计算能力
- 更加安全:基于SOA架构使得AP中各个服务模块独立,可独立加载,IAM管理访问权限
- 敏捷开发:Adaptive AUTOSAR服务不局限于部署在ECU本地可分布于车载网络中,使得系统模块可灵活部署,并可后期灵活独立更新(FOTA)
- 高通信带宽:基于Ethernet等高通信带宽的总线通信
- 更易物联:基于以太网的SOA通信,更易实现无线、远程、云连接,部署Car-2-X应用
- 系统兼容:通过SOME\IP等协议AP可以同CP/Non-AUTOSAR等ECU
微信关注公众号 e栈社区 以获取更多CP/AP技术文章!
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK