

速腾激光雷达与velodyne激光雷达的数据转换
source link: https://epsavlc.github.io/2019/04/12/rslidar_to_robosense.html
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
上次提到了激光雷达与相机的标定,由于我毕设用的是速腾的激光雷达,发现标定时直接报错,故在此记录下问题与解决措施,借此详细分析下速腾激光雷达与velodyne激光雷达的异同。
标定时接上了robosense的激光雷达,提示点云中的点没有”ring”属性。 那么什么是点的”ring”属性?
有序点云与无序点云
首先介绍下什么是有序点云和无序点云。
有序点云数据集,意味着点云是类似于图像(或者矩阵)的结构,数据分为行和列。这种点云的实例包括立体摄像机和tof摄像机生成的数据。有序数据集的优势在于,预先了解相邻点(和像素点类似)的关系,邻域操作更加高效,这样就加速了计算并降低了PCL中某些算法的成本。
在PCL库中,每个pcl::Pointcloud类型都有两个属性,width与height。借CSDN的话来解释下。
WIDTH –用点的数量表示点云数据集的宽度。根据是有序点云还是无序点云,WIDTH有两层解释: 1)它能确定无序数据集的点云中点的个数(和下面的POINTS一样); 2)它能确定有序点云数据集的宽度(一行中点的数目)。
也就是说,对于无序点云,width等于点云中点的个数,而对于有序点云,width等于每行点云的点的个数。
很显然,激光雷达的点云属于有序点云。
Velodyne 数据类型
然而对有序点云进行操作(降采样、刚体变换)后,有序点云就会变成无序点云。velodyne选择给每个点多加了一个属性ring,详细定义如下:
namespace velodyne_pointcloud
{
struct PointXYZIR
{
PCL_ADD_POINT4D; // quad-word XYZ
float intensity;
uint16_t ring;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW // ensure proper alignment
} EIGEN_ALIGN16;
}; // namespace velodyne_pointcloud
这个ring表示每个点之前属于哪个线的,16线的话,这个值为0~15。并且高度自低向高排列。
为什么会用到ring
之前相机标定时提到过,在点云上画出四条边,拟合四条边为四条直线等等。我们运行程序时,显示的直接就是硬纸板的轮廓让你去框(见下图),怎么做到的呢?
其实就是对激光雷达同一ring的点进行遍历,检测每条线上的点如果有z方向上的突变则保存下来,其余删除。然后就得到了上图。
robosense激光雷达数据类型
然而robosense的点云并没有ring属性,它采用的就是上图说的有序点云的方法,height=16,故没办法直接运行标定程序——它的点云中的点没有ring属性。
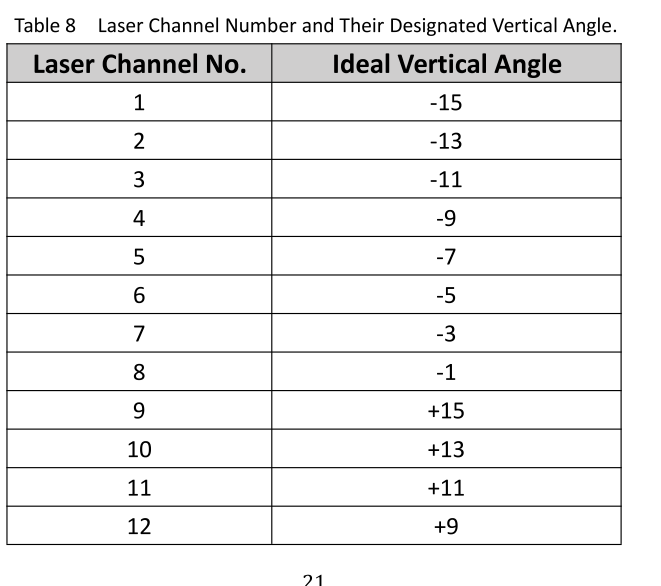
此外,它的线的排列顺序也和velodyne规定的不一样。见下表。
rslidar数据类型向velodyne数据类型转换
为了继续用潘师兄的那个包进行标定,我写了个包将rslidar数据转换为velodyne数据,主要代码见下图:
pcl::PointCloud<pcl::PointXYZI> rs_pc;
pcl::fromROSMsg(*cloud, rs_pc);
rs_pc.height = 16;
pcl::PointCloud<velodyne_pointcloud::PointXYZIR> velo_pc;
for(int i = 0; i < 16; i++)
{
for(int j = 0; j < rs_pc.size() / 16; j++)
{
velodyne_pointcloud::PointXYZIR velo_point;
pcl::PointXYZI& rs_point = rs_pc[j + i * rs_pc.size() / 16];
velo_point.x = rs_point.x;
velo_point.y = rs_point.y;
velo_point.z = rs_point.z;
velo_point.intensity = rs_point.intensity;
velo_point.ring = i < 8 ? i : 16 - (i - 8);
velo_pc.push_back(velo_point);
}
}
代码详见这里。
即接受rslidar的点云,给其加ring属性,转发出去。
Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK