

玩转OpenHarmony PID:教你打造两轮平衡车-开源基础软件社区-51CTO.COM
source link: https://ost.51cto.com/posts/20044
Go to the source link to view the article. You can view the picture content, updated content and better typesetting reading experience. If the link is broken, please click the button below to view the snapshot at that time.
玩转OpenHarmony PID:教你打造两轮平衡车 精华
此次为大家带来的是OpenAtom OpenHarmony(以下简称“OpenHarmony”)系统与PID控制算法相结合并落地的平衡车项目。
PID控制算法是一种经典的,并被广泛应用在控制领域的算法。类似于这种:需要将某一个物理量保持稳定的场合,比如维持平衡,稳定温度、转速等,PID都会适用。在四轴飞行器,平衡小车、汽车定速巡航、温度控制器等场景均有应用。


通过本样例的学习,开发者能够对OpenHarmony系统设备端开发有进一步的认识,还能够掌握PID控制算法的使用。本样例使用OpenHarmony 3.2 Beta1操作系统,硬件平台采用小熊派BearPi-HM Nano(Hi3861)开发板。
本样例效果动图:
硬件配置资源
两轮平衡小车主要硬件资源:
主控CPU:小熊派BearPi-HM Nano(Hi3861)开发板;
陀螺仪:MPU6050六轴陀螺仪传感器;
左右轮:带有霍尔传感器的直流电机;
小车平台及结构件资源可以自行在相关网站获得。

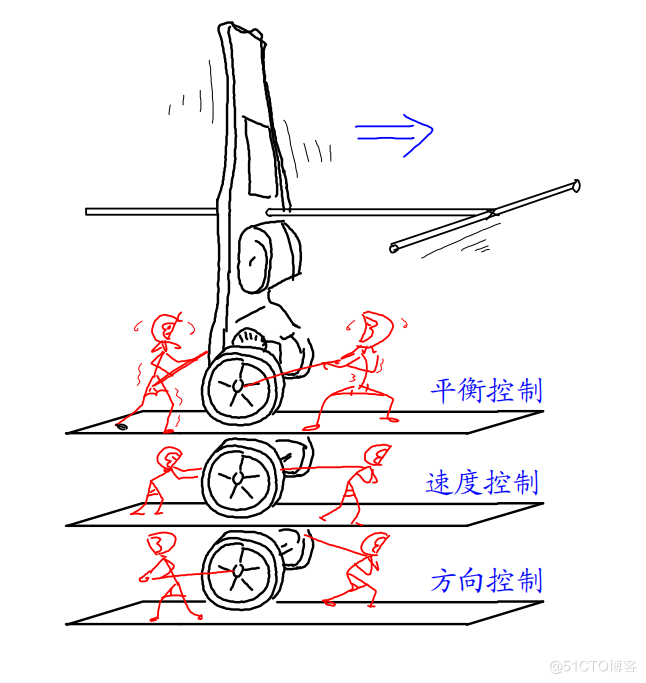
小时候都玩过上图游戏吧:木杆立在手指上,尽量保持木杆直立不倒。
当木杆向前倾斜时,我们会往前行走,以用来抵消木杆的前倾;往后倾斜时,我们会往后倒退。对的!没错!你猜对了。平衡车的控制原理就是这样:

PID算法介绍
平衡车的控制离不开对PID算法的应用。那么什么是PID算法?它能解决什么问题?
PID算法:就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种常见的“保持稳定”控制算法。
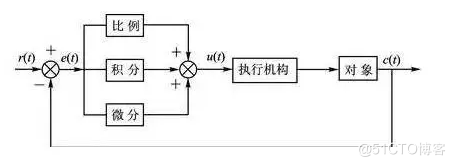
结合两轮平衡车的场景,对PID参数的认识如下:
P比例参数:该参数能够快速让小车达到平衡状态,但是由于控制是滞后的,以及是惯性系统,容易带来超调,即小车会出现前后摇摆的现象。所以P参数不能太大;
I积分参数:小车由于摩擦力或者风阻力,并且P不能太大,只靠P控制有可能达不到稳定状态,所以需要加入I积分参数,消除稳态误差;
D微分参数:平衡小车维持的是倾斜角度要为平衡角度,由于PI参数使小车振荡,小车会出现前后摇摆现象,加入D微分参数能够消除小车的振荡。
两步搭建样例工程
在OpenHarmony源码基础上,两步构建平衡小车代码。(OpenHarmony源码下载路径及BearPi-HM Nano(Hi3861)开发板代码烧录,请参考文章末尾相关链接)
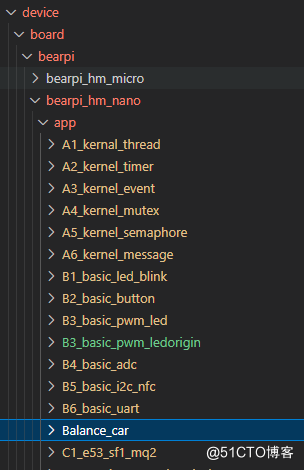
第一步:拷贝Balance_car文件夹到源码路径下:\device\board\bearpi\bearpi_hm_nano\app\ (Balance_car文件获取路径,请参考文章末尾相关链接)
如图文件夹目录:
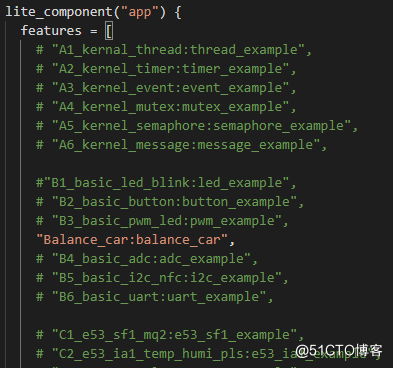
第二步:修改BUILD.gn,在源码路径下:\device\board\bearpi\bearpi_hm_nano\app\BUILD.gn
添加编译依赖:"Balance_car:balance_car",如下图:
关键算法讲解
两轮平衡车的控制主要涉及三个PID环的串联使用,它们分别是直立环(平衡控制)、速度环(速度控制)、转向环(方向控制)。三个控制效果合成,控制轮子运行。

直立环控制算法:
直立环控制算法是平衡小车维持平衡的主要算法。直立环采用了PD算法环节,即只有比例与微分环节。
倾斜角度大小以及角加速度大小决定了轮子的速度大小。可以理解为倾斜角度越大,控制轮子顺着倾斜的方向的速度越大;倾斜的角加速度越大,控制轮子速度也要越大。
float g_middleAngle = 1.0;//平衡角度
float g_kpBalance = -85800.0;
float g_kdBalance = -400;
static int ControlBalance(float angle, short gyro)
{
int outpwm = 0;
float angleBias = 0.0;
float gyroBias = 0.0;
float tempAngle = 0.0;
float tempGyro = 0.0;
tempAngle = 0 - angle;//极性控制
tempGyro = 0 - gyro;
angleBias = g_middleAngle - tempAngle;
gyroBias = 0 - tempGyro;
outpwm = (g_kpBalance / 100 * angleBias + g_kdBalance
* gyroBias / 100);
return outpwm;
}速度环控制算法:
速度环控制的目的是让机器以恒定速度前进或后退,该恒定速度可以为0速度,即要让平衡车静止。速度环采用了PI环控制,只有比例与积分环节。
float g_kpSpeed = 95800.0;
float g_kiSpeed = 200;
static int ControlSpeed(long int left, long int right)
{
int outpwm = 0;
int speedBias = 0;
int speedBiasLowpass = 0;
static int speed_i = 0;
float a = 0.68;
static int speedBiasLast = 0;
speedBias = 0 - left - right;
speedBiasLowpass = (1 - a) * speedBias
+ a * speedBiasLast;
speedBiasLast = speedBiasLowpass;
speed_i += speedBiasLowpass;
speed_i = limit_data(speed_i, SPEED_H, SPEED_L);
outpwm = (g_kpSpeed * speedBiasLowpass / 100 +
gkiSpeed * speed_i / 100);
return outpwm;
}转向环控制算法:
转向环的目的是控制小车以恒定速度转向。在本次场景为了控制小车平衡静止,所以只做了限制转向的操作。
static int ControlTurn(short gyro)
{
int outpwm;
outpwm = g_kpTurn * gyro;
return outpwm;
}以上详细代码,请参考文章末尾的相关链接(Balance_car文件获取路径)。
本文呈现了两轮平衡小车的大致原理。简单介绍了一下PID算法的效果:P比例参数,能够快速让系统达到稳定值,但是P太大容易超调,带来振荡;I积分参数,消除稳态误差,让系统达到稳定值;D积分参数,能消除振荡,但是会使系统时效性变慢。开发者可以根据现场情况,合理调节PID三个参数。
本样例是OpenHarmony知识体系工作组(相关链接在文章末尾)为广大开发者分享的样例。同时知识体系工作组结合日常生活,给开发者规划了各种场景的Demo样例,如智能家居场景、影音娱乐场景、运动健康场景等;欢迎广大开发者一同参与OpenHarmony的开发,更加完善样例,相互学习,相互进步。
OpenHarmony源码下载路径:https://gitee.com/openharmony/docs/blob/master/zh-cn/release-notes/OpenHarmony-v3.2-beta1.md
Balance_car文件获取路径:https://gitee.com/openharmony-sig/vendor_oh_fun
BearPi-HM Nano(Hi3861)开发板代码烧录参考链接:https://gitee.com/bearpi/bearpi-hm_nano/tree/master/applications/BearPi/BearPi-HM_Nano/docs/quick-start
OpenHarmony知识体系共建开发仓:https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md
小熊派开发板学习路径:https://growing.openharmony.cn/mainPlay/learnPathMaps?id=19
OpenHarmony知识体系工作组智慧家居开发样例https://gitee.com/openharmony-sig/knowledge_demo_smart_home
参考资料:
第七届全国大学生“飞思卡尔”杯智能汽车竞赛
电磁组直立行车参考设计方案

Recommend
About Joyk
Aggregate valuable and interesting links.
Joyk means Joy of geeK